
Fターム[5C054CA04]の内容
閉回路テレビジョンシステム (47,623) | 線源 (1,941) | 電磁波 (1,826) | 可視光線 (1,325)
Fターム[5C054CA04]に分類される特許
201 - 220 / 1,325
画像提供装置
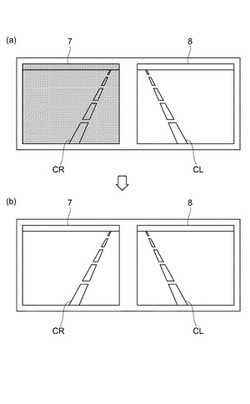
【課題】画像の視認性の向上を図ることができる画像提供装置を提供する。
【解決手段】本発明は、車両に設けられ、車両の周囲の画像を運転者に提供する画像提供装置1であって、車両周囲に位置する第1の撮像範囲RHの画像を撮像する右サイドカメラ3と、車両周囲で第1の撮像範囲RHと重ならない第2の撮像範囲LHの画像を撮像する左サイドカメラ4と、右サイドカメラ3の撮像した右後方画像を運転者に提供する第1ディスプレイ7と、第1ディスプレイ7と別に設けられ、左サイドカメラ4の撮像した左後方画像を運転者に提供する第2ディスプレイ8と、第1ディスプレイ7の提供する右後方画像の画像表示パラメータに応じて、第2ディスプレイ8の提供する左後方画像の画像表示パラメータを補正する画像表示パラメータ補正部13と、を備える。
(もっと読む)
内視鏡装置

【課題】温度の他に露光時間が変化した場合にも、ノイズを除去して画質の良い画像を生成できる内視鏡装置を提供する。
【解決手段】挿入部の先端部に設けたCCD12の有効撮像領域により被写体像を撮像した信号から画像データを生成するAFE32と、有効撮像領域を遮光した状態で生成された黒画像データを保持する黒画像保持部33と、CCD12の温度及び露光時間の情報とからノイズ除去するための補正係数を保持する補正係数保持部35と、黒画像データから抽出したノイズと、補正係数とから補正データを生成する補正データ生成部34と、画像データから補正データを減算してノイズ除去した補正画像データを生成する処理を行う画像補正処理部36とを有する。
(もっと読む)
車両周辺監視装置
【課題】自車両周囲の画像を表示する際に、輝度の高い被写体の影響により、スミアが発生した場合でも、表示画像におけるスミアの影響を低減することができる車両周辺監視装置を提供する。
【解決手段】自車両の周囲を撮像する少なくとも1つの撮像手段と、前記撮像手段で撮像された自車両周囲の画像を表示する表示手段と、を有する車両周辺監視装置において、前記撮像手段は、CCD型の固体撮像素子であり、入射した光の強度が飽和した場合に、該入射した光の強度が飽和した受光素子から、列方向の所定の一方向のみにスミアが発生するが、列方向の他方向および行方向にはスミアが発生しないようになっており、前記CCD型の固体撮像素子は、前記CCD型の固体撮像素子で撮像された撮像画面上において、前記スミアの発生方向が、自車両の上下方向下向きの方向に対して、90°以上の角度となるように配置されている。
(もっと読む)
列車監視システム
【課題】障害が発生した場合に、全ての障害の発生を把握できるような列車監視システムを提供する。また、システムの信頼性が向上する列車監視システムを提供する。
【解決手段】車輌情報制御装置は、監視機器それぞれに、所定の第1の時間間隔で動作確認信号を送信し、送信された該動作確認信号に応答して前記監視機器それぞれから正常信号が送信されたか否かを確認し、所定の第1の時間が経過しても該正常信号を受信しなかった場合には、所定の第2の時間間隔で再度リトライし、リトライ回数が所定の回数に達しても正常信号を受信しなかった場合には、前記監視機器に障害が発生したと判定し、前記障害が発生したと判定した監視機器への動作確認信号の送信を所定の第2の時間停止する。
(もっと読む)
監視システム
【課題】鉄道車両等における監視システムにおいて、周囲の明るさに応じて液晶モニタの画面の明るさを自動的に調整する監視システム。
【解決手段】液晶モニタに光量センサを搭載し、予め登録した関数テーブルを参照する。これによって、外部の明るさ変化に応じて、環境に合わせた液晶モニタのバックライトの輝度を自動的に調整可能とする。この結果、液晶モニタの明るさが見易くなり、運転手や車掌が、ストレスなく、機器操作または映像監視を行うことができる。
(もっと読む)
異常車両検出装置
【課題】道路上などにおいて異常車両検出処理を道路状況を考慮して行なうことができ、しかも異常車両を含む画像として保存することで、異常走行の証拠を効率的に収集できるとともに、異常車両の周囲を走行する車両に対して注意喚起を促すことができるため事故のリスクを低減できる異常車両検出装置を提供する。
【解決手段】車両が走行する道路上の画像をカメラにより撮像し、撮像された画像から前記道路を走行する車両を検出し、検出された車両情報に基づき前記道路の状況を判定し、判定された道路状況および前記検出された車両の位置情報に基づき前記道路における異常車両を検出し、当該異常車両が検出されてから検出されなくなるまでの撮影画像を1単位の画像として保存する。
(もっと読む)
内視鏡画像再生装置
【課題】 汎用性の高い検査を行うことができる内視鏡画像再生装置を提供すること。
【解決手段】 被検査対象物の関心領域に基づいて設定されたテンプレートを記憶するための記憶部と、複数のフレームで構成される前記被検査対象物の検査動画をモニタに再生するための画像信号処理部と、前記検査動画中から前記関心領域と一致する箇所を特定する演算部と、前記検査動画を再生する際に、前記フレームを表示すると共に、前記演算部で特定された箇所を、前記フレームに対して強調する表示制御部と、を備えたことを特徴とする内視鏡画像再生装置。
(もっと読む)
監視システム
【課題】撮像装置を用いて監視対象領域内に侵入する物体を監視する監視システムにおいて、特に立ち入り禁止区域など通常人が侵入することの少ない場所に設置ことが多い。しかし、定期的にシステム動作状態の確認が必要であり、実際に動作状態を確認するには多大の労力を伴う。
【解決手段】撮像装置により撮像した入力映像に、テスト映像生成装置が生成した擬似物体画像を合成することで、擬似的に入力映像に物体が侵入したように見える合成映像を作成する。試験時は、撮像装置より得られた映像の代わりに合成映像を物体検出装置に入力し、合成映像の擬似物体を合成した位置の座標情報と物体検出装置で検出した位置の座標情報を比較し、その結果により物体検出装置の動作が正常かどうかを自動的に判別する。
(もっと読む)
ネットワークカメラシステムおよびこれに利用する映像情報時刻同期方法
【課題】ネットワーク伝送に影響を与えることなく、ネットワークに接続された複数のカメラ装置で撮影された映像情報間において時刻同期をとることが可能なネットワークカメラシステムおよびこれに利用する映像情報時刻同期方法を提供する。
【解決手段】実施形態によれば、ネットワークカメラシステムは、照明装置と、ネットワークで相互に接続された複数のカメラ装置とを備える。照明装置は、基準時刻情報を取得して照明光通信を行うためにコード化し、照明光により一定期間ごとに監視対象エリアに送信する。複数のカメラ装置はそれぞれ、照明装置から発光された照明光が被写体で反射された反射光を取り込むことにより監視対象エリアの撮影を行い、撮影により得られた映像情報を解析して基準時刻情報を抽出し、撮影により得られた映像情報の抽出された基準時刻情報に対応する位置に、当該基準時刻情報を紐付けして録画させる。
(もっと読む)
内視鏡装置
【課題】ユーザの操作負担を軽減させつつ、より高精度な高解像度画像を取得することができる。
【解決手段】CCD104は、被写体像を光電変換して信号を取得する。画像処理手段107はCCDが取得した信号の処理を行い、画像を生成する。高解像処理手段114は、画像処理手段107が生成した画像を複数枚取得し、複数枚の画像から1枚の高解像度画像を生成する。画像記録手段115は高解像処理手段114が生成した高解像度画像を記録する。湾曲制御手段122はUD湾曲モータ120とRL湾曲モータ121とを駆動制御する。システム制御手段110は、湾曲制御手段122がUD湾曲モータ120とRL湾曲モータ121とを駆動制御して先端部128を自動的に少量湾曲させつつ、高解像処理手段114が画像を複数枚取得して高解像度画像を生成するように制御する。
(もっと読む)
監視システムおよび監視方法
【課題】監視対象となる領域を監視する監視システムで、環境変化によって監視システムに不適応な映像が得られた状態を効果的に監視員に提示する。
【解決手段】監視システムにおいて、撮像装置より撮像した画像が物体検出に適応した画像であるかを判断する映像状態診断手段より、物体検出に適応または不適応な映像状態の情報を取得する。映像状態診断手段は、適応判断テーブルに記憶した値を用いて映像状態を判断する。物体検出に不適応な映像状態の情報を取得した場合は、表示装置に監視対象となる領域内の環境異常を表示する。
(もっと読む)
運転支援表示装置
【課題】車両の後退または前進による駐車位置合わせの際に、駐車位置合わせに必要な撮像範囲を表示させつつ、車両の正しい幅を認識し易くする運転支援表示装置を提供する。
【解決手段】20は車両後方の広い範囲を表示する主画面である。21−3は自車両1の近傍を表示する子画面であり、仮想視点から真下に見下ろした視点変換画像を表示する。子画面21−3において、下側は撮像された視点変換後のバンパー13の厚みが適度に表示される程度の表示範囲とし、尚かつ横幅は表示画像の縮尺に対応した車幅までで切り欠いた形状とし、左右側におけるバンパー13以外の部分においては周辺の撮像画像が十分に表示される表示範囲とする。更に切り欠いた形状の側面は丸みをつける。22−3は主画面20と子画面21−3の隙間を埋めるマスク描画であり、撮像画像はここには表示されない。
(もっと読む)
監視カメラ操作装置及びこの監視カメラ操作装置を用いた監視システム
【課題】操作画面に表示するカメラ装置の状態と実際のカメラ装置の状態が不一致になることを防ぐ。
【解決手段】監視カメラ操作装置10は、ネットワーク40を介してカメラ装置20を制御し該カメラ装置20からの状態情報を画面上に表示する構成において、所定周期でカメラ装置20の状態情報を取得する状態情報取得部12と、外部からの操作に応じてカメラ装置20に対して動作を要求したとき計時動作を開始する計時部(16)と、計時動作中は状態情報取得部で取得した状態情報を画面上に表示させない表示禁止部(16)と、計時動作終了後は取得した状態情報または動作制御部から入力した動作情報を入力順に画面上に表示する表示部18とを備えた。
(もっと読む)
撮像装置およびテレビドアホン装置
【課題】撮像装置およびテレビドアホン装置に関し、夜間など暗いところで被写体を撮影する場合であっても、撮影画像中の被写体を識別しやすくし視認性を良くすることを目的とする。
【解決手段】撮像装置9は、来訪者である被写体に撮影用赤外光源部9aから赤外光を照射すると共に、撮像部9cは被写体を撮影している間、被写体動き検出部23により赤外波長域の赤外成分から得られる赤外映像信号から被写体の動き情報を検出し、被写体動き検出部23で検出された被写体の動き情報に基づいて累積加算部24により複数の色成分から得られる可視映像信号中の被写体の振れを補正し、振れ補正された可視映像信号を時間軸方向に累積加算してカラー映像信号を出力する構成とした。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
運転支援表示装置
【課題】車両の後退または前進による駐車位置合わせの際に、駐車位置合わせに必要な撮像範囲を表示させつつ、車両の正しい幅の認識や車両が曲がった場合の傾き方向の事前認識、そして車両に対する被写体の方向を認識し易くする運転支援表示装置を提供する。
【解決手段】20は車両後方の広い範囲を表示する主画面である。21−4は自車両1の近傍を表示する子画面であり、仮想視点から真下に見下ろした視点変換画像を表示する。子画面21−4において、下側はバンパー13を適度に表示させ、上側は自車両1から最も遠い側の被写体が表示される関係とし、その形状は車両中心からの距離が一定の撮像範囲に近づくよう折り目なく湾曲させて表示し、左側および右側のバンパー13付近は車幅に近い撮像範囲を表示し、自車両1から遠くなるにつれて開いた形状として車幅に対して広い撮像範囲を表示する。
(もっと読む)
画像監視装置
【課題】監視領域内の監視画像を処理し、監視領域内の異常状態の発生、特に強盗犯が従業員等の被害者を拘束する行為を検出する画像監視装置を提供する。
【解決手段】撮像部から順次取得された監視画像を処理して異常を判定する画像信号処理部と、画像信号処理部が異常を判定すると警報出力する警報部とを有する画像監視装置において、画像信号処理部は、背景画像と監視画像との差分2値化画像から変化領域を算出する変化領域検出手段と、変化領域として検出された差分2値化画像について床面軸に垂直方向に投影した投影ヒストグラムを求め、当該投影ヒストグラムが上に凸上の2つのピークを有する場合に異常と判定する判定手段を有する。
(もっと読む)
輪止検出装置及び輪止検出エリア設定方法
【課題】本発明は、機種毎に演算処理が異ならず、FPGAの処理を固定として量産時に安価なASICの採用を可能とすること、車両に対するカメラの取付位置が多少左右にずれて画像が多少傾いても、対応することを目的としている。
【解決手段】このため、撮像手段の車両後方画像上に上下に分割された検出エリアを設定し、車両後退中に上側及び下側検出エリアの輝度の差に基づいて輪止を検出する輪止検出装置において、輪止の長さと検出エリアの横幅に基づいた検出エリアの設定位置を記憶する記憶手段を備え、輪止検出時には記憶手段に記憶された位置に検出エリアを設定する。また、車両後方画像上に車両前後方向の中心線から両側に基準とする輪止の長さに基づいて算出された距離だけ離れた位置に車両後端よりも後方に2本の線を引き、線上において検出エリアの横幅に一致する2点の中点を基準にして検出エリアの位置を算出する。
(もっと読む)
監視システム及び監視装置
【課題】監視エリアへの侵入者を自動追跡して撮影可能であるとともに、複数の侵入者が同時に侵入した場合であっても、当該複数の侵入者を漏れなく撮影することが可能な、監視システムを得る。
【解決手段】監視システム5は、監視装置3と表示装置6とを備え、監視装置3は、所定の監視エリア4を撮影する広角カメラ11A,11Bと、広角カメラ11A,11Bによって撮影された撮影画像内に移動物体が含まれている場合に、当該移動物体を自動追跡して撮影することにより、当該移動物体の拡大画像300を取得して表示装置6に表示する望遠カメラ12Aと、オペレータによって遠隔操作されることにより、広角カメラ11A,11B及び望遠カメラ12Aとは独立して、監視エリア4内の所望箇所の画像を取得して表示装置6に表示可能な望遠カメラ12Bと、を有する。
(もっと読む)
建設機械のモニター装置
【課題】下部走行体に対して上部旋回体が旋回可能な建設機械において、旋回角度をモニター画面に正確に反映させて建設機械の走行方向を安全にサポートする。
【解決手段】下部走行体11に対して上部旋回体13が図の矢印方向へ旋回したとき、後方監視カメラ26及び左右の側方監視カメラ27a,27bの3台の監視カメラは、クローラ20や樹木31や人物32の画像位置を変化させながら、キャブ14のモニター画面23に表示させる。このとき、3台の監視カメラによって俯瞰視した連続的な合成画像をモニター画面23に表示させる。従って、モニター画面23に表示された画像の時間的な変化から、下部走行体11に対する上部旋回体13の旋回角度を推定することができるので、オペレータはモニター画面23に表示された旋回角度を認識しながら下部走行体11の走行操作を行うことができるため、旋回角度が変化しても安全走行を実行できる。
(もっと読む)
201 - 220 / 1,325
[ Back to top ]