
Fターム[5C054FC12]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 関心領域の抽出;特定 (2,029)
Fターム[5C054FC12]に分類される特許
1,921 - 1,940 / 2,029
監視記録装置
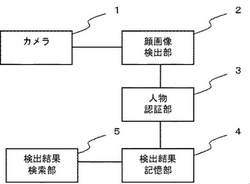
【課題】 画像から目的の人物を容易に検索することができる監視記録装置を提供する。
【解決手段】 監視記録装置は、入力された画像から顔画像を検出する顔画像検出部2と、異なるフレーム間の顔画像が同一人物のものであるかを判断し、顔画像に人物ごとの識別子を付与する人物認証部3と、識別子を付与された顔画像および顔画像の情報を記憶する検出結果記憶部4と、検出結果記憶部に記憶された顔画像を検索する検出結果検索部5とを備える。
(もっと読む)
起床監視方法および装置

【課題】
本発明の目的は介護者の負担を低減して被介護者の転落を防止できる起床監視方法および装置を提供することにある。
【解決手段】
ベッド4に就寝している被介護者1が起床挙動を行ったことを判定する見守り領域8を設定してベッド4の横方向から見守り領域8を含みカメラ2で撮像する。カメラ2から得られる撮像画像の見守り領域8に占める被介護者1の画像領域の大きさが所定値以上の場合に被介護者1が起床挙動を行っていると判定する。
(もっと読む)
監視映像記録システム
【課題】 監視映像データを伝送するためのネットワークを不要とし、監視カメラ装置や録画装置の設置場所を容易に変更できる監視映像記録システムを提供する。
【解決手段】 監視カメラ装置101は、撮像部で撮像した監視映像データを一時記憶する一時記憶部と、記憶した監視映像データを無線で送信する送信部を備える。移動式回収装置102は、携帯型または移動型であり、監視カメラ装置101から送信される監視映像データを受信する受信部と、受信した監視映像データを記憶する記憶部と、記憶した監視映像データを監視映像記録装置103へ転送する転送部とを備える。監視映像記録装置103は、移動式回収装置102から転送された監視映像データを記憶する。監視カメラ装置101に蓄積された監視映像データを指向性を有する高速無線通信によって移動式回収装置102へ転送し、さらに移動式回収装置102から監視映像記録装置103へ転送する。
(もっと読む)
車両周辺認識システム及び画像処理装置
【課題】 車両の走行状態に応じて必要な範囲の画像領域を特定して車両周辺を認識することができる車両周辺認識システム及び該車両周辺認識システムを構成する画像処理装置を提供する。
【解決手段】 画像処理部26は、画像メモリ23から1フレーム単位の撮像画像を読み出し、フレームレートと同期して、記憶部24から車速v、操舵角α、傾斜角βを読み出す。画像処理部26は、読み出した車速v、操舵角α、傾斜角βに基づいて、LUT261を参照して、部分画像を特定するためのパラメータを取得し、特定した部分画像をフレームメモリ262へ一旦記憶する。歩行者認識処理部263は、フレームメモリ262に記憶された部分画像を読み出し、読み出した部分画像と、標準パターン部241から読み出した標準パターンH1、H2、…との類似度を判定する。
(もっと読む)
歩行者報知装置及び方法
【課題】 照射対象とする人物の幻惑を抑制しつつ、歩行者報知のために照射を行う。
【解決手段】 自車両前方にマーキング光を照射するスポット光照射用ランプ2と、自車両前方の歩行者の位置を示す歩行者領域を検出し、歩行者の位置に基づいて、スポット光照射用ランプ2によりマーキング光を照射させて自車両の運転者に報知する対象となる歩行者を特定する位置検出部7とを備え、制御回路1により、歩行者の位置に応じて、当該歩行者領域の一部に対するマーキング光の照射状態を制限して、歩行者の方向にマーキング光を照射させる。
(もっと読む)
ビデオ監視システムにおけるカメラ/物体の動き区分及び客体抽出装置並びにその方法
【課題】物体の動きの発生による侵入者発生と、カメラの動きや揺れなどによる誤った侵入者感知発生とを区分し、該当物体を抽出するビデオ監視システムにおけるカメラ/物体の動き区分及び客体抽出装置並びにその方法を提供する。
【解決手段】本発明によれば、入力動映像からオプティカルフロー(Optical Flow)を求めた後、これを角度値に変形して分類し、この角度値が一定の臨界値を超過する場合、物体の動きであると判断し、角度値が一定の臨界値を超過しなくなる場合、カメラの動きや揺れであると判断する。ここで、物体の動きであると判断される場合、物体のオプティカルフローに対するX−Y投影を用いて動きが発生した部分だけを抽出する作業を進行することによって、客体を分割し、これを連続したフレームにおいて追跡し、物体の移動経路を追跡する。
(もっと読む)
画像認識装置及び画像認識方法
【課題】 複数車線の車線状態を認識することができる画像認識装置を提供する。
【解決手段】 画像認識装置1は、カメラ10と、カメラ10により撮像された画像データに基づき多峰性を有する道路パラメータの確率分布を求めるパラメータ候補取得部21と、道路パラメータの確率分布に基づいて車線の状態を認識する車線状態認識部30とを備える。車線状態認識部30は、道路パラメータの確率分布を複数の領域に分割する領域分割部31と、分割された領域内の確率分布に基づいて道路パラメータ値を演算するパラメータ値演算部32とを有し、確率分布の山が存在する領域及び道路パラメータ値に基づいて、走行中の道路の車線構成、車線数、及び車線の合流・分岐等の車線状態を認識する。
(もっと読む)
着順およびタイム判定装置
【課題】外部装置で判定関連作業を行えるようなシステム構成とすることが可能な着順およびタイム判定装置を提供する。
【解決手段】撮影した判定画像を外部装置(23,24)に表示させるためのファイル形式に変換する手段13を備えることを特徴とする。
(もっと読む)
画像認識システム、画像認識方法及び画像処理装置
【課題】 撮像した画像データから直線と認識される部分又は角と認識される部分を有する領域を排除することにより、人間が存在する領域の認識精度を向上させる画像認識システム、画像認識方法、及び画像処理装置を提供する。
【解決手段】 外部を撮像する撮像装置と、該撮像装置で撮像した画像データを取得して、画像認識処理を施し、処理結果に基づき出力する画像データを生成する画像処理装置と、該画像処理装置で生成した画像データを取得して出力する出力装置とを備える画像認識システムにおいて、画像処理装置は、撮像装置から取得した画像データ中に直線部分又は角部分と認識する部分が存在するか否かを判断する判断手段と、判断手段で、直線部分又は角部分と認識する部分が存在すると判断した場合、直線部分又は角部分を含む領域を画像データから削除する手段とを備える。
(もっと読む)
画像処理装置、および方法
【課題】 撮像画像の消失線を検出し、消失線がモニタの中央となるように画像位置を補正すること。
【解決手段】 制御装置103は、カメラ101で撮像した自車両前方の画像の画像速度を算出し、算出した画像速度に基づいて、画像上に設定した各検出領域内における速度の分散値を算出する。算出した速度の分散値の絶対値が所定の閾値以下となる1つの検出領域を抽出して、抽出した検出領域を消失線として検出する。そして、検出した消失線がモニタ104の垂直方向中央と一致するように画像の表示位置を補正する。
(もっと読む)
撮影プログラム、撮影方法及び撮影システム
【課題】特定対象に関する情報を適切に活用でき、利便性の高い撮影プログラム、撮影方法及び撮影システムを実現する。
【解決手段】 対象物を撮影する撮影ステップと、撮影された対象物の画像情報から対象物の3次元情報を抽出するステップと、画像情報から対象物の属性及び状態のうち少なくとも1つの対象特定情報を抽出するステップと、対象物に基づいて画像情報、3次元情報及び対象特定情報を関連付けて記憶するステップとを有する。
(もっと読む)
監視カメラ、監視画像モニタ装置、監視画像蓄積装置及び監視システム
【課題】 監視システムの構築コストの低減化を図ることができる監視カメラを提供すること。
【解決手段】 監視カメラ10は、監視領域の全体を撮像する撮像部11と、監視領域の全体が撮像された全体画像を所定の画像サイズの画像に変換するサイズ変換部12と、サイズ変換された全体画像の画像信号をNTSC方式の画像信号に変換するNTSCエンコーダ部13と、全体画像に基づいて監視領域内の動き物体を検出する動き検出部14と、全体画像から動き物体を含む動き領域画像を切り出す画像切出部15と、切り出された動き領域画像の画像信号をNTSC方式の画像信号に変換するNTSCエンコーダ部16とを備える。
(もっと読む)
不審訪問者応対システム
【課題】 住人にとって不要な訪問者の応対を警備会社等に委託し、不審な訪問者の応対をしなくてもよいようにした不審訪問者応対システムを得る。
【解決手段】 集合住宅の各住戸の玄関外側に設置された住戸玄関機1と、各住戸玄関機と接続され、各住戸内に設置された住戸機6とから構成され、住戸玄関機は、訪問者を撮像するカメラ2と、スピ−カ4及びマイク5とを備え、住戸機は、住戸玄関機に接続されるインターホン回路8と、スピーカ9及びマイク10と、撮像した訪問者の画像を映し出すモニタ11と、撮像した訪問者の画像や録音した音声を保存するとともに過去に蓄積した不審者の画像を登録する画像・音声データベース12と、訪問者の画像や音声を再生する画像・音声再生手段13と、訪問者との応対を警備会社16に委託する場合に転送して、警備会社に通報・接続する警備会社通報手段14とを備える。
(もっと読む)
車両周辺監視装置
【課題】 赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】 ランレングスデータに変換された画像データから検出される2値化対象物の上端位置OBJ_TOPと、エッジ検出位置j_FL_TOPとの差分(|OBJ_TOP−j_FL_TOP|)が所定閾値DIFF_H_THよりも大きい場合には、2値化対象物が縦方向(例えば鉛直方向上方)に伸びる人工構造物であると判定する。2値化対象物の下端位置OBJ_BOTと、エッジ検出位置j_FL_BOTとの差分(|OBJ_BOT−j_FL_BOT|)が所定閾値DIFF_H_THよりも大きい場合には、2値化対象物が縦方向(例えば鉛直方向下方)に伸びる人工構造物であると判定する。
(もっと読む)
画像情報処理システム、画像情報処理方法、画像情報処理プログラム、及び自動車
【課題】2次元画像処理及び3次元画像処理の短所を補って、赤外線カメラにより撮影された対象物に応じた画像情報を安定に表示可能なシステム等を提供する。
【解決手段】本発明の画像情報処理システム100によれば、重み係数算出ユニット140が、赤外線カメラ210と対象物との距離に応じた変数の測定値に基づき、第1重み係数C1(0≦C1≦1)及び第2重み係数C2(=1-C1)を算出する。また、合成画像認識ユニット150が、第1画像領域認識ユニット110により赤外線カメラ210を通じて2次元画像処理によって認識された第1画像領域A1と、第2画像領域認識ユニット120により赤外線カメラ210を通じて3次元画像処理によって認識された第2画像領域A2とが、第1重み係数C1及び第2重み係数C2により重み付け合成された合成画像領域Aを認識する。そして、画像情報制御ユニット160が合成画像領域Aを囲う枠をHUD220に表示させる。
(もっと読む)
常時異常監視装置
【課題】 被監視域に対する監視人による異常の常時監視を不要とした場合において、異常が発生したときのこの異常の検証作業が容易にできるようにする。盗難など、人に関連する異常が発生した場合の異常の検証作業が、より容易にできるようにする。
【解決手段】 常時異常監視装置1は、目的の被監視域を撮影する撮影手段2と、この撮影手段2により撮影された映像を常時録画する常時録画手段5と、被監視域において異常が発生したとき、この異常を検出して異常信号を出力する異常検出手段8と、この異常検出手段8からの異常信号を入力し、この入力時以前の所定時間の間に常時録画手段5により録画された第1映像をコピーすると共に、入力時以降に撮影手段2により撮影された第2映像を第1映像の後に続けて録画する異常録画手段10とを備える。
(もっと読む)
車両周辺監視装置
【課題】第1画像及び第2画像から対象物の視差を求める際のパターンマッチングを迅速且つ正確に行う。
【解決手段】右位置PRに配置されたエイミングターゲット134a〜134cを右の赤外線カメラ16Rによって撮像して右グレースケール画像54を得る。左位置PLに配置されたエイミングターゲット134a〜134cを左の赤外線カメラ16Lによって撮像して左グレースケール画像58を得る。予め設定された右画像の切り出し領域162Rにおけるエイミングターゲット134a〜134cのy座標の平均値yraを求め、左画像の切り出し領域162Lにおけるエイミングターゲット134a〜134cのy座標の平均値ylaを求める。平均値yraと平均値ylaの差分Δyaを求め、切り出し領域162Lをy方向へ差分Δyaだけ移動設定する。
(もっと読む)
画像認識装置
【課題】 侵入者を検知する画像センサにおいて、小動物を誤って人と検知することがある。
【解決手段】 画像処理部6において変化領域抽出部22は、移動体に応じて生じる変化領域を撮像部2からの監視画像中に検出する。この変化領域に対して、人属性値算出部26により、人らしさを示す人属性値を算出する一方、小動物属性値算出部28により小動物らしさを示す小動物属性値を算出する。小動物は壁や梁を這う行動特性があり、その際の画像には、背景画像のエッジの方向と変化領域の移動方向との一致度が高くなる等の特徴があり、それらの特徴に基づいて小動物属性値が算出される。小動物属性値が高い場合には人属性値を下げる補正を行うことで、小動物による誤報を抑制する。
(もっと読む)
運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両とレーンマーカとの相対的な関係が検出できない場合でもドライバの運転意図を安定的に推定する運転意図推定装置を提供する。
【解決手段】
運転意図推定装置は、レーンマーカを検出できている場合は、自車両とレーンマーカとの相対位置関係に基づいてそれぞれが運転意図を有する複数の仮想ドライバを設定し、実際の運転者の運転操作量と仮想ドライバの運転操作量とを比較して、実際の運転者の運転意図を推定する。レーンマーカが検出できていない場合は、自車両と先行車との相対位置関係に基づいて算出される自車両の車線内横位置を用いて、複数の仮想ドライバを設定する。レーンマーカの検出状況に応じて仮想ドライバの運転操作量の算出方法を選択する。
(もっと読む)
画像情報処理システム、画像情報処理方法、画像情報処理プログラム及び自動車
【課題】赤外線カメラを通じて認識される対象物の画像領域が不安定なものであっても、当該対象物の画像情報を画像表示装置に安定に表示させ得るシステム等を提供する。
【解決手段】本発明の画像情報処理システム100によれば、第1画像領域認識ユニット121が、赤外線カメラ210を通じて測定された対象物の位置に応じた第2変数X2に基づき、当該対象物に応じた第1画像領域A1を認識する。また、第2画像領域認識ユニット122が、自動車200の走行状態に応じた第1変数X1と、第2変数X2とに基づき、第1画像領域A1を推定した上で、これを第2画像領域A2として認識する。そして、画像情報制御ユニット140が、第1画像領域A1に応じた第1画像情報及び第2画像領域A2に応じた第2画像情報のうち一方又は両方をHUD220に表示させる。
(もっと読む)
1,921 - 1,940 / 2,029
[ Back to top ]