
Fターム[5C054FC12]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 関心領域の抽出;特定 (2,029)
Fターム[5C054FC12]に分類される特許
1,901 - 1,920 / 2,029
自動車の周囲を監視するシステムと方法
本発明は、自動車(1)の周囲を監視する方法に関する。本発明によれば、前記自動車は、ブラインド・スポットを含む監視領域(A)内で衝突する可能性のある監視対象物(2)の存在を検知する検知システムを有し、前記検知システムは、前記監視領域内にある監視対象物を表す画像を捕獲する捕獲装置と、入力信号を処理し解析する電子システムとを有する。本発明の方法は、前記捕獲装置により捕獲された画像の処理と解析が行えず、前記監視対象物を信頼性のある検出結果を提供できない場合に、前記捕獲装置によりカバーされるべき監視領域の方向に向けて赤外線光を放射する赤外線光源を自動的に活性化するステップと、前記捕獲装置により捕獲された画像を処理し解析した後、前記電子システムが、前記監視領域内の監視対象物が赤外線を必要とせずに検出できると決定した時に、前記赤外線光源を自動的に停止するステップとを有する。  (もっと読む)
(もっと読む)
動体認識カメラおよび動体監視システム
【課題】 通信費用が軽減されると共に、監視カメラ自体も簡便で廉価な動体認識カメラおよび動体監視システムを実現する。
【解決手段】 動体認識カメラ10の撮影領域に、設定手段24を用いて注目領域を設定し、この注目領域に動体を認識する際に、撮影条件を動体認識時モードに切り替えて画像情報の取得および転送を行うこととしているので、注目領域の画質を維持しつつ、画像情報の転送に伴う通信費用を従来と同等あるいは低く抑えつつ、高価なハードウェアが付属されることのない簡便で廉価な動体認識カメラ10を実現させる。
(もっと読む)
移動物体検出装置及び移動物体検出方法

【課題】 移動物体を高精度に追跡可能な移動物体検出装置及び移動物体検出方法を提供することを課題とする。
【解決手段】 撮像画像から移動物体を検出する移動物体検出装置1であって、撮像手段2と、撮像手段2で撮像した撮像画像から移動物体を検出する移動物体検出手段13と、移動物体検出手段13で検出した移動物体の向きを検出する向き検出手段15と、撮像手段2で異なる時間に撮像した各撮像画像から各々検出された移動物体の位置から移動物体の動きを検出する動き検出手段16と、向き検出手段15で検出した移動物体の向きと動き検出手段16で検出した移動物体の動きに基づいて撮像画像における移動物体の存在する領域を予測する領域予測手段17とを備え、領域予測手段17で予測した領域内から移動物体を検出することを特徴とする。
(もっと読む)
後方監視装置
【課題】車両後方確認に際しドライバーの目視による認識性を向上させる。
【解決手段】車両後方の所定の高さにある赤外光源から赤外光が車両の水平方向に拡散されるから、赤外光源より低い物について障害物として照射せず、撮像カメラで撮像する車両後方に赤外光源の位置より高い障害物があると、赤外光が照射され、これを撮像カメラで撮像して、所定以上の赤外反射映像信号がある場合にその画像部分に所定の色を与えるから、ドライバーに対して障害物の位置を明確にモニタ上に示すことができ、さらに、その画像部分の位置に基づいて車両から赤外光照射対象物までの距離を得るから、モニタに表示された障害物までの距離を知ることができる。
(もっと読む)
移動物体抽出用画像作成方法
【課題】 屋外の使用にも耐え、さらにマスク領域の設定を不要とする移動物体抽出用画像の作成方法を提供すること。
【解決手段】 監視用テレビカメラから得られる画像から動く物体を検出するときの移動物体抽出用画像作成方法であって、前記監視カメラからの画像を時系列に所定の時間間隔で複数枚記憶し、基準となる画像と該基準となる画像よりも前に記憶された画像とを所定の時間間隔毎に複数枚の差分画像を算出し、該複数枚の差分画像の論理積画像を得て、該論理積画像を所定閾値で二値化処理して二値化処理画像を得て、該二値化処理画像を多数決処理して移動物体を抽出するための画像を作成する。
(もっと読む)
施設監視システム
【課題】広く、かつ大きな施設を備えた敷地内であってもセキュリティ対策を充分に維持することができる施設監視システムを提供する。
【解決手段】本発明に係る施設監視システムは、敷地内の画像監視が可能なカメラ装置6と、カメラ装置6からの映像信号の受信、表示および各カメラ装置の旋回、ズーム等の制御を行う中央監視制御装置13と、正規に設けられた敷地への入出口以外の場所から侵入したことをその位置情報とともに通報する侵入検出装置17と、カメラ装置6からの映像信号に基づいて指定された画素の集りを監視対象として設定し、この監視対象の動きを追尾する画像処理装置16と、カメラ装置6の撮影視野から監視対象が外れているとき、別のカメラ装置6による影に切り替えるカメラ選択装置18と、監視対象の敷地内における所在位置とそれ以前の軌跡を人に対して呈示する追尾軌跡表示装置19とを備えた。
(もっと読む)
車両監視方法及び特定文字パターン認識装置及び車両監視システム
【課題】 車両の特定文字パターン認識による車両監視方法及び特定文字パターン認識装置及び車両監視システムに関し、特定文字パターンの認識結果に応じて伝送データ量を制御する。
【解決手段】 撮影部による撮影画像データを処理して車両の特定文字パターンを認識する認識装置7と、複数の認識装置と回線6を介して接続したセンタ1とを含み、認識装置7は、撮影画像データを基に車両特定文字パターンの認識処理を行い、文字パターンが認識できない時は、撮影画像データから車両領域を切出して低圧縮率で圧縮し、文字パターンの一部のみ認識できた時は、特定文字パターン領域を切出して低圧縮率で圧縮し、文字パターンの全部を認識できた時は、特定文字パターン領域を切出して高圧縮率で圧縮して、記録又は送出し、センタ1は、認識装置からの圧縮データを回線6を介して受信して格納する管理テーブル4及び表示する表示部3を有する。
(もっと読む)
駐車場監視装置
【課題】 サービスエリアや大型商店の駐車場等、通常の駐車車両が多く存在し、その出入りが頻繁である場所において、放置車両の状況を把握するための情報を、作業の負担を大きくすることなく管理者に提供できる駐車場監視装置を得る。
【解決手段】 駐車場の車両群11を監視カメラ12により撮影し、この画像を画像入力部14により一定周期で取り込み、静止画蓄積部15に静止画を蓄積し、この蓄積された複数の静止画から合成画像生成部16により合成画像を生成し、この合成画像及び静止画から放置車両位置検出部17により放置車両の位置を検出し、蓄積画像再生部18により再生された静止画に放置車両の位置を重畳させて表示部19に表示することで、管理者の放置車両の確認作業を簡便化するようにしたものである。
(もっと読む)
情報システム、制御方法、およびそのプログラム
【課題】家人の在不在にかかわらず不審人物を検知したら報知することができる。
【解決手段】カメラ15が不審人物を検知すると(S31)、その人体を検知した時の異常情報と人体検知画像情報を情報端末装置1に送信する(S32)。次に、その人体検知された時の画像情報を情報処理サーバ装置10に送信する(S33)。情報処理サーバ装置10ではこの送信された画像情報を保存し(S34)、その異常情報を電子メールとして携帯電話11に送信する(S35)。携帯電話11では人体を検知したという異常状態の電子メールが受信される。これを見た家人は、携帯電話の画面上で、インターネットを介して情報処理サーバ装置10にアクセスすることによって、保存された画像情報を要求することができる(S36)。これによって携帯電話上で画像情報を表示させることができる(S37)。
(もっと読む)
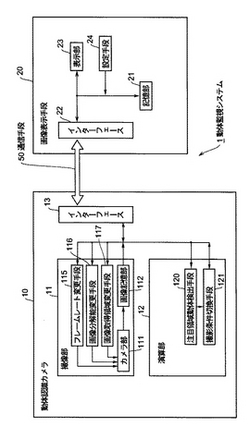
動画データ管理方法および動画データ管理装置並びに動画表示装置
【課題】画像データと付加情報との同期を保証しつつ、付加情報を編集可能な付加情報として扱うことが可能な動画データ管理方法を提供する。
【解決手段】撮像装置によって撮影された映像に対応する画像データおよびこの映像について動体抽出処理を行って得られたベクトルデータを管理する動画データ管理装置を介して動画表示装置による表示処理に供する動画データ管理装置において実行される結合ステップは、各フレームの画像データの末尾にこの画像データに対応して得られた移動体の位置およびサイズを示す図形を表すベクトルデータを結合して動画表示装置に送信する。動画表示装置において、動画データ管理装置から各フレームの画像データを受け取るごとに、そのフレームの画像データに基づく表示処理を行う。次いで、上書きステップは、画像データに基づいて再生された画像に、ベクトルデータに基づいて生成される図形を表す線画を上書きする。
(もっと読む)
画像処理による車両安全管理システム
【課題】各機能に共通的に画像処理機能を行い、センサの増加を抑制する。
【解決手段】一実施態様によれば、車両の周辺領域を画像化するようになっている画像処理システムが提供され、この画像処理システムは画像処理プロセッサを含み、この画像処理プロセッサは、撮像装置により自動的に捕捉された、車両のすぐ近くの領域の画像を示す情報を受信するようになっている。この画像処理プロセッサは、車両のすぐ近くの画像を示す情報を解析して、車両のすぐ近くの領域の画像を示す情報が少なくとも1つの所定の環境を示すかどうかを自動的に判断する論理を含む。幾つかの実施態様において、この画像処理システムは衝突防止および衝突記録のために利用される。幾つかの実施態様において、この画像処理システムは、衝突の可能性大および/または衝突発生を明示するため、および/または、衝突回避および/または衝突安全装置を実施するために利用される。
(もっと読む)
車両周辺認識システム及び画像処理装置
【課題】 撮像装置で撮像して得られた撮像画像から、外界の人工構造物を示す人工構造物領域を除去して車両周辺を認識する車両周辺認識システム及び該車両周辺認識システムを構成する画像処理装置を提供する。
【解決手段】 画像処理部45は、撮像画像を該撮像画像の湾曲部分を矯正した矯正画像に変換するための変換テーブルを有するLUT451と、矯正画像の画素が有する輝度に基づいてエッジを検出するエッジ検出部452と、検出されたエッジ画像に基づいて直線又は角を検出する直線・角検出部453と、検出された直線又は角に基づいて外界の人工構造物に対応する人工構造物領域を特定する人工構造物領域特定部454と、特定された人工構造物領域を除いた矯正画像に基づいて歩行者認識処理を行う歩行者認識部455と、矯正画像を記憶するフレームメモリ456とを有する。
(もっと読む)
遠隔作業支援システムと現場側装置と指示側装置とそのプログラム及び方法
【課題】指示者の作業指示内容を作業者に対して正確に伝えることを可能にする。
【解決手段】現場側装置1は、撮影画像入力部11により入力される操作対象物の撮影画像データを指示側装置1に送信すると共に、映像処理部14に設けられた画像メモリ141に記憶させる。指示情報受信部13は、指示側装置2から送信された操作対象範囲及び移動ベクトルを含む指示情報を受信する。映像処理部14では、座標変換部142において受信された操作対象範囲及び移動ベクトルをプロジェクタ4の座標系に変換する。そして、変換された操作対象範囲及び移動ベクトルと画像メモリ141に記憶された撮影画像データとから操作対象範囲画像を抽出して移動操作を反映させた投影画像P1を作成する。投影画像出力部15は、この作成された投影画像P1をプロジェクタ4により操作対象物に重ねて投影させる。
(もっと読む)
周辺物体情報取得装置及びこれを用いる駐車支援装置
【課題】 信頼性の高い物体情報のみを取得できる周辺物体情報取得装置の提供。
【解決手段】 車両に搭載され、該車両の周辺に存在する物体に関する物体情報を取得する周辺物体情報取得装置80において、前記車両から所定方向に発射した検出波の反射波を受信して該検出波の反射点を点列で出力する測距手段70と、前記点列を記憶する手段82と、前記記憶手段に記憶された点列に基づいて、物体の存在を検出する物体検出手段と、前記点列を曲線又は直線で近似して近似曲線又は近似直線を導出する近似手段85と、前記点列の信頼性を評価する評価手段86と、前記評価手段による評価結果に基づいて、前記点列若しくは前記近似曲線又は近似直線から導出可能な情報を、前記検出した物体に関する物体情報として採用すべきか否かを判定する判定手段87とを備えることを特徴とする。
(もっと読む)
監視システム
【課題】 監視本部では監視対象をリアルタイムの動画によって把握することができ、しかも、携帯端末からも監視対象を個別的に把握することのできる監視システムを提供する。
【解決手段】 監視カメラCaとスイッチ類SW1,SW2とを配置した複数個の監視対象1…1と、スイッチ類のON動作に応答して監視カメラCaからの動画データを表示及び保存する監視本部2と、自己の管理下にある監視対象を監視可能な携帯端末31を備える個別監視部3とが、通信回線4A,4Bを通して接続されて構成される。監視対象1…1には、監視カメラCaから出力される画像データを、要求に応じて配信するコンピュータ装置5が配置され、携帯端末31では、コンピュータ装置5から配信される画像データの取得処理と、取得した画像データをデコードして表示する再生処理とを、適宜に切り換えて並列実行する。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】少なくとも2値化対象物OBの下端部を含む所定の対象領域(マスク)OA内にて検出した水平エッジの幅方向での含有率RATEが所定閾値RATE_TH(例えば、80%等)よりも大きい場合には、2値化対象物が、2値化対象物の下端部に、例えば人体の肩部の横幅よりも過剰に大きな横幅を有する構造物を備える人工構造物であると判定し、含有率RATEが所定閾値RATE_TH以下である場合には、2値化対象物が、2値化対象物の下端部に、例えば人体の肩部の横幅よりも過剰に長い横幅を有する構造物を備える人工構造物以外であると判定する。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】2値化対象物OBの下端から下方に互いに隣接する複数の第1探索領域Mask_U1(I)を設定し、第1探索領域Mask_U1(I)の視差dn1(I)と2値化対象物OBの視差Δdとにより、|dn1(I)−Δd|<所定閾値DISP_TH又は(dn1(I)−Δd)≧DISP_THとなる最下端位置の第1探索領域Mask_U1(I)を検出する。(dn1(I)−Δd)≧DISP_THの場合、2値化対象物OBと略同等の視差を有する最下端位置の第1探索領域Mask_U1(K)の下端位置D_F_yPから、他の対象物O1の高さdelta_Hを算出し、他の対象物O1により遮蔽される2値化対象物OBの縦幅O_delta_Hを推定する。グレースケール領域の下端位置Ob_min_yを(D_F_yP+O_delta_H)とする。
(もっと読む)
画像信号処理装置及びセンシング装置
【課題】侵入者の検出確度を高めた画像信号処理装置を提供する。
【解決手段】監視空間を撮像した入力画像データを取得する画像取得部12と、新規入力画像データと背景画像データとに基づいて変動領域の特徴量を求める画像処理部14と、を備える画像信号処理装置において、画像処理部14は、新規入力画像データと背景画像データとの差分を演算して背景差分データを求める背景差分算出部22と、背景差分データに基づいて変動領域を抽出するラベリング処理部24と、変動領域を、移動物体が新規入力画像データに取り込まれた結果生ずる真領域と、移動物体が背景画像に取り込まれた結果生ずる偽領域と、に分割し、真領域に対する特徴量又は偽領域に対する特徴量に基づいて変動領域に対する特徴量を求める属性値演算部26とを備えることによって上記課題を解決できる。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】人工構造物判定処理では、グレースケール画像において、縦方向の各縦位置J毎での横方向に沿った輝度値の平均値の縦位置Jに応じた変化(横平均輝度プロジェクション)F(J)と、F(J)での縦位置Jに応じた傾きの変化(微分係数)S(J)とに基づき、最大ピーク位置j_enを検知する。最大ピーク位置j_enを含み、横平均輝度プロジェクションF(J)と、グレースケール画像において、横方向の各横位置I毎での縦方向に沿った輝度値の平均値の横位置Iに応じた変化(縦平均輝度プロジェクション)W(J)とにおいて、輝度値が平均輝度値AVE_Hよりも大きい領域の縦幅c_Hと横幅c_Wとの縦横比が所定上限値R_THUよりも大きい、あるいは、所定下限値R_THLよりも小さい場合には、2値化対象物が人工構造物であると判定する。
(もっと読む)
ビデオ監視システムにおけるカメラ/物体の動き区分及び客体抽出装置並びにその方法
【課題】物体の動きの発生による侵入者発生と、カメラの動きや揺れなどによる誤った侵入者感知発生とを区分し、該当物体を抽出するビデオ監視システムにおけるカメラ/物体の動き区分及び客体抽出装置並びにその方法を提供する。
【解決手段】本発明によれば、入力動映像からオプティカルフロー(Optical Flow)を求めた後、これを角度値に変形して分類し、この角度値が一定の臨界値を超過する場合、物体の動きであると判断し、角度値が一定の臨界値を超過しなくなる場合、カメラの動きや揺れであると判断する。ここで、物体の動きであると判断される場合、物体のオプティカルフローに対するX−Y投影を用いて動きが発生した部分だけを抽出する作業を進行することによって、客体を分割し、これを連続したフレームにおいて追跡し、物体の移動経路を追跡する。
(もっと読む)
1,901 - 1,920 / 2,029
[ Back to top ]