
Fターム[5C054FF06]の内容
閉回路テレビジョンシステム (47,623) | 映像信号に基づく制御 (1,396) | 閉回路TV系以外の系の制御 (700) | 警報、消火装置の駆動制御 (496)
Fターム[5C054FF06]に分類される特許
1 - 20 / 496
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
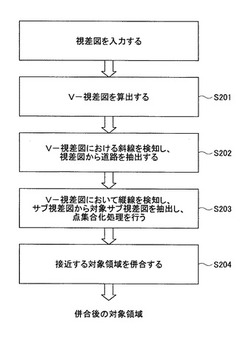
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
警告表示方法および警告表示プログラム

【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
車載用動画像データ記録装置
【課題】従来の車載用動画像圧縮装置においては、事故発生前後の車両周辺状況を撮影した高画質の動画像データが得られないという課題があった。
【解決手段】車両周辺画像を撮影するカメラ部101と、カメラ部101が撮影した画像を通常画質で圧縮する通常画質符号化部102と、通常画質符号化部102が出力する動画像データを記録する通常画質データ記憶部103と、車両走行時に発生した異常状況など何らかのトリガを検出するトリガ検出部104と、カメラ部101が撮影した画像を高画質で圧縮する高画質符号化部105と、トリガ検出部104でのトリガ検出タイミングから一定時間前に撮影された高画質符号化部105が出力する動画像データを記録する高画質データ記憶部106を具備する車載用動画像データ記録装置により、通常走行時は通常画質記録により記憶メモリの有効利用ができ、かつ、事故発生直前直後は高画質の動画像データを得ることができる。
(もっと読む)
車両の運転支援装置
【課題】運転者が車両の前方の状況を確認し易いようにカメラの撮像画像を運転者に対して表示することができる車両の運転支援装置を提供する。
【解決手段】運転支援装置1は、カメラ3aの撮像画像を表示する表示手段4,7と、所定の条件が成立する場合にカメラ3aの撮像画像から運転者の注意を喚起すべき対象物を検出し、対象物を検出した場合に運転者の注意を喚起するための処理を実行する注意喚起処理手段8とを備える。カメラ3aの撮像画像の表示モードは、撮像画像の一部の領域(小画角領域)を拡大して表示する小画角領域表示モードと、小画角領域を含む広角領域を表示する広角領域表示モードとがある。表示手段4,7は、前記所定の条件が成立する場合には、小画角領域表示モードにて撮像画像を表示し、前記所定の条件が成立しない場合には、広角領域表示モードにて撮像画像を表示する。
(もっと読む)
車両周辺監視装置
【課題】単眼カメラによる距離検出と単眼カメラ以外の構成による距離検出とを切替えて、車両周囲の対象物の位置を追跡するときに、対象物の距離検出の信頼性が低下することを防止した車両周辺監視装置を提供する。
【解決手段】単眼距離検出部11による検出距離が切替距離以下になった後は、ステレオ距離検出部12により車両1と対象物間の距離を検出して対象物の位置を追跡し、走行状況検知部15により検知されている車両1の走行状況が、単眼距離検出部11による距離検出精度を低下させるおそれがある精度低下懸念状況であるときは、切替距離hを、精度低下懸念状況でないときよりも長く設定する対象物位置追跡部13を備える。
(もっと読む)
撮像装置
【課題】光学フィルタを通じて撮像した撮像画像に対して画像処理を行って互いに異なった光学成分を抽出して光学成分抽出画像を生成する場合に必要となる演算パラメータのデータ量を少なくすることを課題とする。
【解決手段】全単位画素(1pixel)に対応する演算パラメータのうち、全単位画素を3以上の単位処理領域に区分したときに互いに離間した2つの単位処理領域A,B,E,Fを構成する単位画素に対応した演算パラメータは予め記憶しておき、これらの単位処理領域の間に位置した特定単位処理領域α,β,γを構成する単位画素についての演算パラメータは、予め記憶せず、当該特定単位処理領域を挟み込む単位処理領域についての演算パラメータを用いた補間処理により生成する。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】監視カメラに対する妨害行為を検出できるようにする。
【解決手段】画像の画像データを取得し、取得された画像をN(N>1)個のブロックに分割し、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新対象のブロックとして順次指定し、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた画素の数と所定の値を比較することで、ブロックに異常があるか否かを判定し、異常があると判定された画像内のブロック数と所定の値を比較することで、妨害が発生したか否かが判定される。本技術は、例えば、監視システムに適用できる。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 駐車時に消費電力を抑制しつつ、車両の周囲の監視対象物の監視をすることが可能な車載カメラ制御装置等の提供。
【解決手段】 車載カメラ制御装置は、赤外線画像データと可視画像データを取得する画像取得部110と、走行モードと防犯モードとを含む複数の処理モードのうちのいずれかの処理モードを、使用処理モードとして設定するモード設定部130と、処理部120とを含む。処理部120は、使用処理モードとして走行モードが設定されている場合には、可視画像撮像部220を通常駆動状態に設定し、可視画像データと赤外線画像データとに基づいて、報知用データの生成処理を行い、使用処理モードとして防犯モードが設定されている場合には、可視画像撮像部220を、動作オフ状態又は通常駆動状態よりも消費電力が低い省電力状態に設定し、赤外線画像データに基づく監視対象物の検出処理を行う。
(もっと読む)
映像モニタリングシステムの品質検査
【課題】モニタリングシステムにおける装置の適切な運用を保障する映像モニタリングシステム(100)の性能制御の方法を提供する。
【解決手段】本システムは、少なくとも1台のカメラ(114)及び性能制御ステーション(120)を含むシステム装置を含む。方法は、性能制御ステーション(120)において、視覚出力信号を提供するステップを含む。第1カメラ(114)によって記録された画像データは、それから、獲得され、且つ、獲得された画像データは、視覚出力信号に関連して、解析される。解析により、システム(100)のための性能指標が得られる。性能指標によって、システム(100)に関連した性能制御動作が、性能制御ステーション(120)によって、そのとき実行される。
(もっと読む)
歩行者用周辺監視装置
【課題】本発明は、歩行者が、接近する歩行者周辺の物体と衝突するのを未然に防げる歩行者用周辺監視装置を提供する。
【解決手段】本発明は、歩行者に着脱可能に装着され、当該歩行者を中心とした歩行者周辺を撮影するカメラ10と、カメラで撮影した画像から、歩行者周辺から歩行者へ接近する物体を検出する接近物体検出手段11と、カメラで撮影した画像から、歩行者へ接近する物体が歩行者と衝突する危険度を判定する危険度判定手段11と、判定された危険度が高いとき、歩行者に物体が接近している旨を知らせる報知手段4,11と具備して構成した。同構成により、歩行者に接近する物体が、歩行者に対し衝突する危険があると、歩行者にその旨が報知されるから、歩行者は、同報知をうけて、接近物体との衝突を避ける行動を行えば、未然に衝突が避けられる。
(もっと読む)
監視装置、警備システム及び監視装置用プログラム
【課題】 従来に比べて「真の侵入」検知の誤報を低減する。
【解決手段】 第1〜3監視エリアのうち1つ、もしくは2つ以上の監視エリアにて不審者等の侵入(仮侵入)があった旨が検知された場合であって、「仮侵入」1つの場合は、2秒以上経過後に再びが「仮侵入」が検知されたとき、2つ以上の監視エリアで「仮侵入」が検知された場合は各検出時刻に2秒以上の時間差があったときに「真の侵入」があったと判断し、不法侵入者ありとしてメール等により担当警備会社に報知し、直ちに現地に急行する。一方、上記検出モードで、時間差が2秒以上なかった場合は、監視エリアにおける「真の侵入」がなかったと判断し(誤報)、20秒後にはタイムアウトして初期状態に戻る。
(もっと読む)
情報処理装置、情報処理装置の制御方法及びその制御プログラム、情報処理システム、情報処理方法
【課題】すべての者を警告の出力対象とし、あらかじめ登録された者を認証することができた場合に限り例外的に警告を発報しないことで、施設外に出る者を漏らさずチェックすること。
【解決手段】あらかじめ定められた第1の場所を通過した人の行動を判定する行動判定手段と、行動判定手段で判定した結果に応じて、警告情報を生成する生成手段と、人情報データベースにあらかじめ登録された人情報を用いて、あらかじめ定められた第2の場所を通過した人が警告対象か否か認証する人認証手段と、人認証手段による認証結果に応じて、生成手段が生成した警告情報の出力を規制する規制手段と、警告情報を出力する出力手段と、を備えたことを特徴とする。
(もっと読む)
電子内視鏡システム
【課題】複数の映像を同時に扱う電子内視鏡システムにおいて、どの映像に対してどのような操作を行っているのかを容易に判別できる電子内視鏡システムを提供する。
【解決手段】電子内視鏡20で得られた映像信号に対して第1及び第2の画像処理回路32、33においてそれぞれ所定の画像処理を施して第1及び第2の映像を得て、モニタ(表示手段)40に同時に表示する。第1及び第2の画像処理回路32、33の設定に対応する通知音をそれぞれ設定し、通知音発生部(通知音発生手段)34によって通知する。通知音によって、どの映像に対してどのような画像処理を適用しているのか、また、操作の切り替えが、即座に、また容易に判別することができる。
(もっと読む)
通行監視システム
【課題】複数の監視カメラを用いることなく監視カメラの死角を解消することにより、立入制限エリアへの非許可者の不正侵入を確実に監視し得る通行監視システムを得る。
【解決手段】通行監視システムは、所定の出入口の近傍領域を第1方向から撮影するカメラ1と、カメラ1の画角内において、第1方向とは異なる第2方向から出入口の近傍領域が映るように配置された鏡11と、カメラ1によって撮影された映像内の鏡11に映し出された第1映像と、カメラ1によって第1方向から出入口の近傍領域を撮影した第2映像とに基づいて、出入口を通行する人物が一か複数かを判定する処理部4とを備え、処理部4は、第1映像に基づき第1のアルゴリズムを用いて人物の単複判定を行い、第2映像に基づき第1のアルゴリズムとは異なる第2のアルゴリズムを用いて人物の単複判定を行う。
(もっと読む)
映像監視システム
【課題】本発明は、異常状態を外部に通知し、当該異常状態を解消するための支援を行うことが可能な映像監視システムを提供することを目的とする。
【解決手段】本発明による映像監視システムは、映像記録装置10は、外部の異常の有無を検出する異常検出手段14と、電話装置30への音声信号を入力する音声入力手段16と、電話装置30からの音声信号を出力する音声出力手段17と、電話装置30との通話が可能となるように制御を行う制御手段13とを有し、電話装置30は、映像記録装置10からの音声信号を出力する音声出力手段31と、映像記録装置10への音声信号を入力する音声入力手段32とを有し、制御手段13は、異常検出手段14が外部の異常を検出すると、電話装置30に対して自動的に発呼し、音声入力手段17,32および音声出力手段16,31を介した映像記録装置10と電話装置30との間の通話を可能とすることを特徴とする。
(もっと読む)
挙動認識システム
【課題】ビデオフレームの取得されたストリームに基づいて挙動を解析及び学習する方法及びシステムを提供する。
【解決手段】ストリーム中に示される物体が、ビデオフレームの解析に基づいて決定される。各物体は、物体の運動をフレームごとに追跡するのに使用される、対応する探索モデルを有することができる。物体のクラスが求められ、物体の意味表現が生成される。意味表現は、物体の挙動を求め、取得されたビデオストリームによって示される環境内で生じている挙動について学習するのに使用される。環境内のそうした物体の移動又は活動或いは不在を解析することにより、任意の環境についての正常な挙動及び異常な挙動を、迅速に、リアルタイムで学習し、学習したものに基づいて、異常な挙動又は疑わしい挙動を識別及び予測する。
(もっと読む)
運転支援装置
【課題】運転支援装置において、オプティカルフロー検出等の画像処理機能を向上することにある。
【解決手段】画像処理手段(5)は、広角レンズ(3)を有する撮像手段(4)により撮像される画像上の各画素の座標に対応するイメージプレーン上の各画素の座標を記録した記録手段(8)と、撮像手段(4)により撮像された画像上の画素位置から記録手段(8)に記録された座標の対応関係に基づいてイメージプレーン上の画素位置を取得する画素位置取得手段(9)とを備える。
(もっと読む)
車両用画像処理装置
【課題】画像のダイナミックレンジが大きく、白線等の道路設置物や灯火を確実に検出可能な車両用画像処理装置を提供すること。
【解決手段】第1の撮像手段3と、第2の撮像手段5と、前記第1の撮像手段3及び前記第2の撮像手段5の露出制御を、道路設置物・灯火認識用露出制御と、立体物認識用露出制御との間で切り替える切り替え手段7と、前記第1の撮像手段3及び前記第2の撮像手段5により撮像された画像から前記道路設置物、灯火又は前記立体物を検出する検出手段7と、を備え、前記道路設置物・灯火認識用露出制御において、前記第1の撮像手段3の露出と、前記第2の撮像手段5の露出とが異なることを特徴とする車両用画像処理装置1。
(もっと読む)
画像表示システム、画像生成装置及び画像生成方法
【課題】シフト位置の切替操作に関わらず俯瞰画像を表示し続けることで、車両の周囲の状況を確認することができる画像表示システム、画像生成装置及び画像生成方法を提供する。
【解決手段】画像表示システム120は、車両に配置されたカメラ51,52,53で得られる撮影画像に基づいて車両及び車両の周囲を仮想視点から見た様子を示す合成画像を生成する合成画像生成部34と、車両の変速位置のシフトレバーのシフト位置を検出するシフト位置信号受信部13と、シフト位置信号受信部13によって検出されたシフト位置に応じて合成画像を表示するディスプレイ21と、シフト位置が変更されてからの時間を計測する計測部14と、を備え、合成画像表示状態でシフト位置が変更された場合、その際に計測部14で計測された計測時間が所定時間に達しないうちに元のシフト位置に戻された場合は、合成画像を切り替えずにその表示を維持する。
(もっと読む)
1 - 20 / 496
[ Back to top ]