
Fターム[5C122DA14]の内容
スタジオ装置 (397,422) | スタジオ装置の用途/種類 (48,563) | カメラ (47,519) | 車載カメラ (1,302)
Fターム[5C122DA14]に分類される特許
101 - 120 / 1,302
カメラシステム
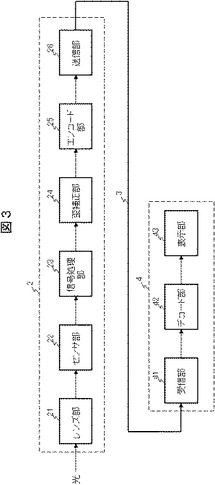
【課題】魚眼レンズ使用に伴う画像歪みを補正し動画像を効率良く圧縮すること。
【解決手段】カメラ装置2は、魚眼レンズを使用するレンズ部21と、魚眼レンズで撮影した歪曲収差のある画像を歪曲収差が小さくなるように歪補正処理を行う歪補正部24と、歪補正部24から出力された画像を圧縮符号化するエンコード部25を備える。表示装置4は、カメラ装置2のエンコード部25で圧縮符号化された画像を伸長復号化するデコード部42と、デコード部42から出力された画像を表示する表示部43を備える。
(もっと読む)
画像処理装置及びその調整方法

【課題】画像処理装置の構成要素にばらつきがあったり、経年劣化が生じた場合でも、認識対象を精度よく認識できる画像処理装置及びその調整方法を提供すること。
【解決手段】画像を取得する画像取得手段3と、前記画像を構成する画素の画素値を、補正係数を用いて補正する補正手段5と、前記補正手段5による補正後の前記画像において物体を認識する物体認識手段5とを備えた画像処理装置1の調整方法であって、前記画像取得手段3により、所定の標準光源を撮像した標準光源画像を取得する工程と、前記標準光源画像を前記補正手段5により補正する工程と、補正後の前記標準光源画像の色特性Aと、前記標準光源の色特性Bとを対比する対比工程と、前記対比工程の結果に応じて、前記色特性Aと、前記色特性Bとの差が減少するように、前記補正係数を更新する更新工程と、を備えることを特徴とする画像処理装置1の調整方法。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
撮影システム、撮影方法、及び撮影プログラム
【課題】所定の方向を撮影可能な角度で、車両の外界を撮影可能な位置に撮影端末が設置されたか否かを自動的に判断することができる、撮影システムを提供すること。
【解決手段】撮影システム1は、車両2に着脱自在に設置される撮影端末20による画像の撮影位置を特定する撮影位置特定部24bと、撮影端末20に複数回の撮影を行わせ、当該撮影された複数の画像間の差異に基づき、撮影端末20が車両2の外界を撮影可能な位置に設置されたか否かを判定する設置判定部24dと、設置判定部24dにより、撮影端末20が車両2の外界を撮影可能な位置に設置されたと判定された場合、撮影端末20により撮影された画像と撮影位置特定部24bにより特定された当該画像の撮影位置とを相互に関連付けた画像情報を送信する画像情報送信部24cとを備える。
(もっと読む)
屋内用自律走行移動体の自己位置測定方法及び装置
【課題】人間がいるエリアを自律走行する場合であっても、屋内用の自律走行移動体の自己位置を、光源の追加無しに、同じエリアの人間に視覚的な違和感を持たせにくく、かつ、周辺の環境状態の影響を受けにくい形態で測定すること。
【解決手段】走行台車1に搭載したビデオカメラ4aの撮影画像中に、天井の複数の照明器3のうち最低1個が常に入るようにした。そして、各照明器3は、自己のユニークなID番号のパターンで変調した照明光を発光し、ビデオカメラ4aで撮影した照明器3とその設置位置を、受光センサ4bが受光したその照明器3からの照明光を復調して得たID番号に基づいて照合する。照合した照明器3の設置位置と、ビデオカメラ4aの撮影画像から計算したビデオカメラ4a乃至走行台車1からの照明器3の相対位置とに基づいて、走行台車1の自己位置を測定する。
(もっと読む)
撮影システム、撮影方法、及び撮影プログラム
【課題】所定の方向を撮影可能な角度で、車両の外界を撮影可能な位置に撮影端末が設置されたか否かを自動的に判断することができる、撮影システムを提供すること。
【解決手段】撮影システム1は、車両2の進行方向を特定する車両方向特定部13bと、車両2に着脱自在に設置される撮影端末20の撮影方向を特定する撮影方向特定部24aと、撮影端末20による画像の撮影位置を特定する撮影位置特定部24bと、車両2の進行方向と撮影端末20の撮影方向とに基づき、所定の方向を撮影可能な角度で撮影端末20が設置されたか否かを判定する設置判定部24dと、設置判定部24dにより、所定の方向を撮影可能な角度で撮影端末20が設置されたと判定された場合、当該撮影端末20により撮影された画像と撮影位置特定部24bにより特定された当該画像の撮影位置とを相互に関連付けた画像情報を送信する画像情報送信部24cとを備える。
(もっと読む)
カメラ装置
【課題】入出力信号特性を補正した際のノイズの増幅を抑制する。
【解決手段】画像を撮像する撮像手段101と、撮像時の露光を制御する露光制御手段102と、入力信号と出力信号の特性が所定の入出力関係になるよう補正する第1の補正手段105と、前記第1の補正手段により補正された後の雑音特性を記憶する補正後雑音特性記憶手段106と、前記補正後雑音特性記憶手段により記憶された雑音特性を補正する第2の補正手段107と、を備える。
(もっと読む)
顔撮影システム
【課題】光を照射する投光器にユーザが接近した場合にユーザの目に対する負担を軽減できる顔撮影システムを提供すること。
【解決手段】ユーザの顔を撮影するカメラは投光器に物体が接近した場合にボケが生じるレンズ構造を備えている。顔撮影システムは、投光条件、露光条件を設定し(S11、S12)、カメラが撮影した撮影画像を取得し(S13)、その撮影画像から顔領域の認識を試みる(S14)。認識できた場合には(S15:Yes)、撮影画像中の顔領域や構造物の構造物領域のエッジ情報を抽出する(S16〜S18)。顔領域のエッジ情報を構造物領域のエッジ情報で正規化する(S19)。正規化後のエッジ情報が所定の閾値未満か否かを判断する(S20)。エッジ情報が閾値未満の場合には(S20:Yes)、顔領域にボケが生じているとして、投光器からの光の照射を停止させ又は減光させる(S21)。
(もっと読む)
撮像装置
【課題】 従来、被写体の位置を特定するために、被写体に発信源を設置するため、装置構成が複雑になる。
【解決手段】 速度センサ4により検出されたフライングディスク1の回転移動速度に基づいて、撮像センサ3の撮像方向が撮像方向判別部により判別される。そして、撮像方向判別部により判別された撮像方向が所定方向の場合に、画像取得部の制御により、回転しながら飛行するフライングディスク1に備えられた撮像センサ3によって記録用の画像が取得される。このため、上空から被写体の撮像を行なうために、被写体に発信源を設置したり、撮像装置に発信源方向探知手段や撮像方向駆動部等が必要とされない。この結果、上空から被写体を撮像するフライングディスク1に搭載された撮像装置の構成は簡略化される。
(もっと読む)
撮像装置
【課題】明るく、MTF劣化を抑え、且つ、信頼性に優れた広角複眼像の撮像が可能な撮像装置を提供する。
【解決手段】被写体に対向する位置に設けられた、複数のレンズがアレイ配列されたレンズアレイ1と、レンズアレイ1の像面側に設けられた、複数のレンズのそれぞれにより結像される被写体の個眼像の集合である複眼像を撮像する撮像素子6とを有する撮像装置において、レンズアレイ1を被写体側に対して凸状に湾曲にするとともに、レンズアレイ1と撮像素子6の間に、レンズアレイ1と対向する面が凹状に湾曲した三角プリズム7を設けて、レンズアレイ1の各レンズの光軸が撮像素子6の受光面に対して垂直になるようにする。
(もっと読む)
撮像装置および撮像方法
【課題】画像内の重要度の高い物体を含む領域の露出が自動的に最良の状態となるような撮像装置および撮像方法を提供すること。
【解決手段】画像内の物体の形状と記憶された物体の形状との一致度を判定し、判定結果に基づいて画像の露出を制御することにより、画像内の重要度の高い物体を含む領域の露出が自動的に最良の状態となるような撮像装置および撮像方法を提供することができる。
(もっと読む)
車両用カメラユニットおよびブラケット
【課題】取り付けるガラス面の傾斜角に応じて取り付けピッチ角を調整可能な車両用カメラユニットおよびブラケットを提供する。
【解決手段】車両のガラス301に取り付けられる車両用カメラユニット1であって、車両周囲の画像を撮像する車両用カメラ10と、車両用カメラ10のピッチ方向の取り付け角度を離散的に切り替えて調整可能とする調整機構とを備え、調整機構は、車両用カメラ10のピッチ軸線方向に当該車両用カメラ10から突出する複数の係爪部101a,101bと車両用カメラ10を把持しつつ車両のガラス301に固着されるブラケット111とから成り、ブラケット111は、離散的に形成され係爪部101a,101bと選択的に係合可能な複数の係受部120a〜120dを備える。
(もっと読む)
撮像装置及びその制御方法
【課題】複数の撮像光学系を有するカメラにおいて、狭角側の撮像光学系の焦点距離が変更された場合、広角側の撮像光学系の画角を制御することにより、ユーザが主被写体を容易に把握できるようにすること。
【解決手段】撮像装置は、第1撮像光学系1と第2撮像光学系2を備える。映像信号処理部4は、第1撮像光学系1の画角で撮像した第1画像と、第1撮像光学系1よりも広角で第2撮像光学系2が撮像した第2画像を処理し、第1画像及び第2画像の映像信号を表示部5に出力する。制御部3は、第1撮像光学系1の焦点距離が変更された場合、第1撮像光学系1の焦点距離に応じて第2画像の拡大率を変更する指示を映像信号処理部4に出力し、第2撮像光学系2の画角を制御する。
(もっと読む)
撮像装置
【課題】光学フィルタを通じて撮像した撮像画像に対して画像処理を行って互いに異なった光学成分を抽出して光学成分抽出画像を生成する場合に必要となる演算パラメータのデータ量を少なくすることを課題とする。
【解決手段】光学フィルタに備わった複数種類のフィルタ領域2a,2bを透過した各光の一画素内における受光面積比率が互いに等しい4種類の共通単位画素が周期的に存在するように構成し、各種類の共通単位画素についてそれぞれ64個ずつ含んだ16×16画素で構成される単位処理領域に区分し、同一の単位処理領域内における同一種類の共通単位画素については同一の演算パラメータを用いて画像処理を実行する。
(もっと読む)
撮像装置
【課題】1台のカメラによって、障害物候補の画像を撮像するとともに、風景画像も撮像し、位置ずれなく風景画像と障害物候補画像を重畳させる撮像装置を提供する。
【解決手段】赤外線カメラ10には遠赤外線撮像手段11と近赤外線撮像手段12を備え、撮像手段切替部18によって、遠赤外線画像と近赤外線画像を切り換える。そして、遠赤外線画像から、特徴量抽出部152により、障害物候補領域を特定し、その障害物候補領域を近赤外線画像に重畳し、表示モニター50に表示する。
(もっと読む)
車載カメラの露出制御値の決定方法
【課題】ターゲットの撮像環境に影響されにくい形で、そのターゲットの認識に適した露出制御値を決定する。
【解決手段】ターゲットを撮像範囲に配置した状態でのカメラによる撮像画像からターゲットを検出した後(S14〜S16)、検出した撮像画像におけるターゲットの輝度を測定し、測定した輝度をターゲットの認識に適した目標値とするための露出制御値を算出する(S17)。このような決定方法によれば、撮像画像からまずターゲットを検出し、その上でターゲットの輝度を測定するようにしているため、背景を含まない形で測定したターゲットの輝度に基づき露出制御値を算出することができる。したがって、ターゲットの撮像環境に影響されにくい形で、そのターゲットの認識に適した露出制御値を決定することができる。
(もっと読む)
撮像装置
【課題】
非線形特性を持つ撮像素子を用いた撮影において表示画像の視認性を保ちつつユーザが目的とする被写体を認識して表示する撮像装置を提供する。
【解決手段】
入射光を光電変換し画像信号として出力し且つその入出力特性が非線形である撮像素子101と、画像信号を入出力特性の異なる2つ以上の画像信号へ変換して出力する特性変更手段102と、画像信号に対してカメラ装置として必要な信号処理を行うカメラ信号処理手段103と、画像信号に対して特定の条件を満たす信号を検出して認識情報を生成する認識手段105と、認識情報を画像信号に付加するための情報付加手段106と、画像信号を出力するために必要な信号処理を行う出力手段104と、を持つ構成とした。
(もっと読む)
ステレオカメラ装置
【課題】通常は前記複数の撮像部の同期信号のタイミングを一致させて同期をとり、被写体との距離が一定以下となる即ち高速のフレームレートが要求される場合でも露光時間を短くする必要がないステレオカメラ装置を提供する。
【解決手段】複数の撮像部と、該複数の撮像部のそれぞれの撮像タイミングをフレーム同期信号によって制御する制御部と、前記撮像部から出力された映像信号を受けて画像処理を行う画像処理部とからなるステレオカメラ装置において、前記制御部は、被写体との距離が所定の距離よりも大きい場合に前記複数の撮像部のフレーム同期信号のタイミングを一致させておき、被写体との距離が前記所定の距離以下である場合に前記複数の撮像部のフレーム同期信号のタイミングをずらして撮影を行う。
(もっと読む)
車載カメラ
【課題】筐体上へ落下した水滴のレンズへの付着を防止できる車載カメラを提供すること。
【解決手段】筐体7の上面9にレンズ13が露出し、前記上面9がフロントガラス21に対向するように車室内に取り付けられる車載カメラ1であって、前記上面9は、前記レンズ13に向って下がる傾斜部9aを有しており、前記傾斜部9aは、前記傾斜部9aにおける傾斜方向Cを横切るように設けられた水滴よけ構造15、17を備えることを特徴とする車載カメラ1。
(もっと読む)
露出制御装置
【課題】認識領域の明るさに応じた車載カメラの露出制御の追従性を向上させる。
【解決手段】車載カメラによる車両前方の撮像画像において、認識領域よりも遠方の明るさを測定し(S11,S12)、時間差をもって測定した明るさを比較することで明るさ変化量を算出する(S13)。そして、次回の撮像時の認識領域の明るさ変化量の合計値が判定用しきい値以上であるか否かを判定し(S14)、しきい値以上でないと判定した場合には(S14:NO)、次回の撮像時の露出制御値を前回と同じ値に維持する(S15)。一方、しきい値以上であると判定した場合には(S14:YES)、カメラ21の露出制御値を次回の撮像時の認識領域の明るさに基づき算出する(S16)。
(もっと読む)
101 - 120 / 1,302
[ Back to top ]