
Fターム[5C122FH09]の内容
Fターム[5C122FH09]の下位に属するFターム
領域抽出/画素抽出 (2,933)
Fターム[5C122FH09]に分類される特許
201 - 220 / 1,291
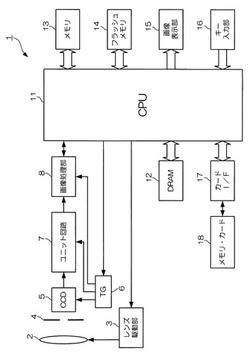
撮像装置、及びプログラム
【課題】セルフタイマ撮影時のカメラ設置場所の自由度を高め、意図した撮影範囲の画像を容易に撮影可能とする。
【解決手段】デジタルカメラ1では、撮影者が手持ちで方向を定め、ズームを合わせ、撮影範囲(その時にライブビューされている範囲そのもの)を決めると、第1の撮影処理(仮撮影)を行う。撮影者が、仮撮影画像を確認後、デジタルカメラ1を適当な面上(机の上など)に設置し、被写体側に移動して撮影範囲に入ると、光学ズームを仮撮影時よりも広角側に移動させ、セルフタイマがタイムアップすると、第2の撮影処理(本撮影)を行い、仮撮影画像と本撮影画像との間の位置合わせを行い、本撮影画像から仮撮影画像で規定される撮影範囲の画像を切り出す。
(もっと読む)
画像処理装置

【課題】照射効率を改善するとともに、撮像範囲内の照度むらを抑制する。
【解決手段】LED13−1は、第1の波長の光を検出対象物21に照射し、LED13−2は、第1の波長よりも長波長である第2の波長の光を検出対象物21に照射し、LED13−1及び13−2それぞれに設けられているアナモルフィックレンズは、検出対象物21に対する光の照度分布を変化させ、撮像部15は、第1の波長の光が検出対象物21に照射されているときに入射される検出対象物21からの反射光に基づいて第1の画像を生成するとともに、第2の波長の光が検出対象物21に照射されているときに入射される検出対象物21からの反射光に基づいて第2の画像を生成し、画像処理部17は、生成された第1及び第2の画像に基づいて、検出対象物21の肌領域を検出する。本発明は、例えば、撮像した画像から人間の肌を表す肌領域を検出する検出装置に適用できる。
(もっと読む)
画像合成装置、画像合成方法及びプログラム
【課題】合成画像の生成を簡便に行う。
【解決手段】撮像装置100であって、背景画像(第1画像)と被写体切り抜き画像(第2画像)とを合成する際の状況に関する合成状況情報に基づいて、背景画像と被写体切り抜き画像とを合成する際の状況が特定の状況であるか否かを判定する判定部6bと、当該判定にて特定の状況であると判定された場合に、合成状況情報に基づいて、複数の被写体切り抜き画像の中で背景画像との合成の候補となる候補画像を所定数絞り込む絞込部6cと、絞り込まれた所定数の被写体切り抜き画像の候補画像の中で、背景画像と合成すべき被写体切り抜き画像をユーザによる操作入力部11の所定操作に基づいて指定する中央制御部12と、指定された被写体切り抜き画像と背景画像とを合成する画像合成部5bとを具備している。
(もっと読む)
撮像装置、及びその制御方法
【課題】被写体を認識して認識された被写体の動きに追従して合焦状態を維持する被写体追尾機能において、合焦距離の変動を抑制する。
【解決手段】フォーカス制御手段が、被写体検出手段で検出された所定種類の被写体に合焦するようにフォーカスレンズを駆動する第1制御モード、又は、ズーム制御手段がズームレンズを駆動中でない場合はフォーカスレンズを駆動せずズーム制御手段がズームレンズを駆動中である場合は合焦距離を変化させないようにフォーカスレンズを駆動する第2制御モードで動作可能であり、フォーカス制御手段は、検出手段で前記所定種類の被写体が検出されズーム制御手段がズームレンズを駆動中である場合、所定種類の被写体が撮像画像の中心を含む所定の範囲内に存在する場合は、第1制御モードで動作し、当該所定種類の被写体が所定の範囲内に存在しない場合は、第2制御モードで動作する。
(もっと読む)
撮像装置、撮像システム及び撮像方法
【課題】ユーザが運転する自動車が狭隘道路の出口や丁字路等で左右の視界が遮られた状態で移動する場合であっても、左右から接近する車両等の周囲の環境を把握する画像を容易に確認できるようにする。
【解決手段】イメージセンサ11が画像信号を生成し、画像信号による画像を切り出し変換する画像変換処理部131より車両左右画像を生成するのと合わせ、車両の進行方向の画像を交互に生成する。第1の領域の内部に第2の領域を画像記憶部132に設定する。画像変換処理部131は、画像信号を書き込むフレームを1フレーム毎に異ならせて第1及び第2の領域にそれぞれ全体画像及び部分画像に対応する画像信号を交互に書き込む。アナログエンコーダ18は、第1及び第2の領域から連続走査タイミングで読み出した画像信号を所定の方式の画像信号に変換してPinPとして同一画面に出力する事で進行方向及び直角方向からの接近物確認を可能とする。
(もっと読む)
撮像モジュールおよび撮像装置
【課題】広い空間周波数領域にわたって低ノイズな画像を提供すること。
【解決手段】撮像モジュールは、第1撮像系と、第1空間周波数領域での応答が第1撮像系より低く、第1空間周波数領域より高い第2空間周波数領域での応答が第1撮像系より高い第2撮像系と、第1撮像系により撮像された被写体の画像の第1空間周波数領域における空間周波数成分と、第2撮像系により撮像された被写体の画像の第2空間周波数領域における空間周波数成分とを用いて、被写体の画像を生成する画像生成部とを備える。
(もっと読む)
電子機器及びカメラ
【課題】焦点位置を撮影者(被写体)が知ることができる電子機器及びカメラを提供する。
【解決手段】光学系で結像した被写体像の合焦位置を表わすための光を、プロジェクタモジュールから被写体Mに向けて照射するようにした。
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び記録媒体
【課題】複数の異なるアスペクト比の画像データに対して自然な周辺光量低下処理を施こすことが可能な画像処理装置を提供する。
【解決手段】 入力された画像データに対して、周辺光量を低下させる処理を施す画像処理装置であって、周辺光量低下データを用いて、前記入力された画像データに周辺光量を低下させる処理を施す処理手段を有し、前記取得手段で取得される、異なるアスペクト比に対応した複数の前記周辺光量低下データは、対応するアスペクト比における最高像高との比が等しい像高における、周辺光量を低下させる処理の強さが、周辺光量低下データ間で等しくなることを特徴とする。
(もっと読む)
画像データ管理装置、画像データ管理プログラム、及び画像データ管理方法
【課題】撮影された画像データから、合焦状態の良好な画像データのみを選択し、目的の画像データを即時に閲覧する。
【解決手段】CCDカメラ5により撮像された画像データを管理すコンピュータ1であって、複数枚の画像データを記憶保持する記憶部120と、CCDカメラ5により撮像された画像データを順次取得し、取得された画像データの合焦点評価値を算出するとともに、各画像データの合焦点評価値に基づく優先順位を設定する合焦点評価値算出部116と、合焦点評価値算出部116が設定した優先順位に応じて、記憶部120に記憶された画像データを選択するデータ選択部115と、記憶部120に記憶保持された画像データを、優先順位に基づいて、表示するウインドウ42とを有する。
(もっと読む)
撮像装置
【課題】被写体において人以外の動物が認識された場合にその目の検出を行うことなく適切にAF制御が可能な撮像装置を提供する。
【解決手段】合焦レンズと撮像素子からなる撮像手段から出力される画像データからペット動物の顔を認識し、前記画像データの全体画像領域のうち、認識されたペット動物の顔部分に対応する領域の情報を出力するペット検出工程(ステップ11−2)と、ペット検出工程により前記画像データの全体画像領域におけるペット動物の顔部分に対応する領域の情報が出力されると(ステップ11−2のYES)、当該領域のうち限定した一部の領域をAF領域として設定するAFエリア限定工程(ステップ11−3)と、AFエリア限定工程により設定されるAF領域において前記画像データが合焦状態となるように、前記合焦レンズを駆動する自動合焦制御を行うAF処理工程(ステップ11−4)と、を備える。
(もっと読む)
被写体特定用プログラム、およびカメラ
【課題】画像内の被写体を特定すること。
【解決手段】被写体特定用プログラムは、連続して入力されるフレームの中から対象画像を選択し、対象画像の色情報または輝度情報に基づいて1つの画像を複数の区分画像に区分する区分手順と、複数の区分画像のそれぞれを色情報または輝度情報を用いて2値化して複数の2値化区分画像を生成する2値化手順と、複数の2値化区分画像のそれぞれに対して、対象画像内における被写体を特定するために用いる評価値を算出する評価値算出手順と、評価値に基づいて、対象画像内における被写体を特定する被写体特定手順と、被写体特定手順で特定した対象画像内における被写体の位置を記憶する記憶手順と、被写体特定手順で特定した被写体を連続して入力されるフレーム間で追尾する追尾手順とをコンピュータに実行させる。
(もっと読む)
傾き検出装置、撮像装置および方法
【課題】画像の内容に左右されずに、短時間かつ高い精度で画像の傾きを検出する。
【解決手段】水平エッジ抽出処理部70は、入力画像に対する1回目の水平エッジ抽出処理と膨張処理部73が処理した画像に対する2回目の水平エッジ抽出処理を実行する。黒抜き処理部71は、1回目の水平エッジ抽出処理後の画像に対する1回目の黒抜き処理と2回目の水平エッジ抽出処理後の画像に対する2回目の黒抜き処理を実行する。2値化処理部72は、1回目の黒抜き処理後の画像を2値化する。膨張処理部73は、2値化処理後の画像中の白画素を膨張させる。座標取得処理部74は、2回目の黒抜き処理後の画像中の白画素の座標値を取得する。直線検出処理部75は、座標値に基づいて2回目の黒抜き処理後の画像中の直線を検出する。傾き算出処理部76は、直線の傾きを算出する。
(もっと読む)
画像処理装置
【課題】複数台の撮像装置に含まれる欠陥画素に対する補正処理に割り当てるリソースを適正化する。
【解決手段】複数台の撮像装置からの映像信号を入力する入力部と、それぞれの撮像装置に係る欠陥画素の情報を収集して、欠陥画素情報として記録する欠陥画素情報収集部と、あらかじめ定められた補正対象設定条件にしたがって、欠陥画素情報に記録された欠陥画素のうち、補正対象とする欠陥画素を撮像装置毎に設定する補正対象画素設定部と、映像信号の補正対象と設定された欠陥画素に対して画像補正を行なう欠陥画素補正処理部とを備えた画像処理装置。
(もっと読む)
カメラ装置、カメラシステム、制御装置、及びプログラム
【課題】デジタル的なパン、チルト、ズーム等の操作と、機械的なパン、チルト、ズーム等の操作とを容易に且つ効率良く行う。
【解決手段】本発明に係るカメラ端末装置100は、カメラ部102で撮像された全体画像の中に指定された第1の領域を制御するための第1の情報を取得する送受信部106と、全体画像の中に指定された第2の領域を制御するための第2の情報を取得する送受信部106と、第1の情報に基づいてカメラ部102のメカニカルな動きを制御する制御部108と、カメラ部で撮像された画像から第1の領域の画像を取得し、第2の情報に基づいて第1の領域の中から第2の領域の画像を抽出する処理を行う画像処理部104と、を備える。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
撮像装置
【課題】 手動フォーカシングに際し、スルー画像におけるぼけ状態を適切に誇張して、容易に、高精度に且つ高速に合焦状態を確認することができ、ピント合わせを容易に行うことができる。
【解決手段】 撮像素子101により取得された被写体画像をスルー画像としてリアルタイム的にLCDモニタ10に表示させる。手動フォーカシング時に、合焦評価値のピークが検出された場合には、合焦評価値の最大値と合焦評価値の最新の値とを比較し、これら両者の差の大きさが所定値を超えた場合には、第2の撮像信号処理ブロック104−2により、差の大きさに対応する量だけスルー画像のぼけを誇張してスルー画像を表示させる。合焦評価値のピークが検出されていない場合には、撮像信号処理ブロック104−2により、スルー画像のぼけを所定量だけ誇張してスルー画像を表示させる。
(もっと読む)
撮像装置、その制御方法およびプログラム
【課題】適切なオート制御を行うとともに消費電力を低減させる。
【解決手段】撮像装置は、シャッター操作受付手段と、オートフォーカス制御手段と、撮像手段と、対象物検出手段と、オートフォーカス制御動作決定手段とを具備する。オートフォーカス制御動作決定手段は、シャッター操作が受け付けられていない状態において所定の対象物が検出されない場合には、探索領域情報において現在の焦点距離およびF値の組合せに関連付けられている探索領域の中のフォーカスレンズが現在存在する探索領域以外の探索領域に、フォーカスレンズを順次移動させる。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
撮像信号処理回路及び撮像信号処理方法
【課題】フラッシュ等の影響による撮像画像に対して手作業の編集作業によることなく撮像信号処理回路内で画像処理をして違和感のない画像を出力。
【解決手段】RGB又はYPbPr3チャンネルの撮像信号を時系列的に少なくとも2画面分を記憶する画像メモリを具え、画像メモリの出力から撮影時にフラッシュ発光が発生したときのみ該画像メモリの画像を入れ換え処理を行うメモリ処理回路と、メモリ処理回路の出力の中でフラッシュ発光の影響により全体の輝度値が上昇している画像に対して、輝度の低い部分の黒線を隠蔽処理する黒線処理回路と、入力信号がRGB3チャンネルの場合のみ輝度信号を作成する輝度信号作成回路と、輝度信号作成回路の出力に対して撮影時にフラッシュが発生したか否かを判別し、発生した画像におけるフラッシュの発光による輝度値が急激に上昇する部分を境界線として検出しメモリ処理回路と黒線処理回路とに対し制御を行う。
(もっと読む)
色情報生成システム、色情報生成装置、色情報生成方法および色情報生成プログラム
【課題】物体の色と当該物体の背景の色とが似ている場合であっても、色にもとづいて物体が撮影された映像を検索可能な情報を生成する色情報生成システムを提供する。
【解決手段】抽出手段301は、検知手段200が物体を検知した場合に、撮影手段100によって撮影されたカラー映像から物体を抽出する処理を行う。色情報生成手段302は、物体種類情報とカラー映像に応じた撮影日時情報とを含み、抽出手段301の抽出結果に応じた色を示す色情報を生成する。色情報格納手段303は、色情報生成手段302が生成した色情報を格納する。また、色情報生成手段302は、抽出手段301が物体を抽出できた場合に、物体の色を示す色情報を生成し、抽出手段301が物体を抽出できなかった場合に、予め用意された所定の範囲のカラー映像である背景映像の色を示す色情報を生成する。
(もっと読む)
201 - 220 / 1,291
[ Back to top ]