
Fターム[5C122HA65]の内容
スタジオ装置 (397,422) | 一般技術 (37,735) | 電子回路技術 (8,743) | 記憶素子及びその制御 (3,593) | ROM/LUT (801)
Fターム[5C122HA65]の下位に属するFターム
テンプレート (124)
Fターム[5C122HA65]に分類される特許
81 - 100 / 677
カメラシステム及び交換レンズ、カメラボディ
【課題】思い通りの写真を撮るために、どのような交換レンズが必要かを容易に知ることができるカメラシステムを提供する。
【解決手段】本発明のカメラボディは、画像データに基づく画像を表示する表示手段120と、前記画像データに施す効果を指定する効果指定手段と、前記指定された効果に基づいて、前記画像データに画像処理を施す画像処理手段140と、複数の交換レンズの名称と特性情報を記憶する記憶手段140と、制御手段140と、を備え、前記制御手段140は、前記画像処理を施された画像データと前記記憶手段140に記憶された複数の交換レンズの特性情報に基づいて、前記記憶手段140に記憶された複数の交換レンズの名称の中から一の交換レンズの名称を、前記画像処理を施された画像データに基づく画像とともに前記表示手段120に表示させる、ことを特徴とする。
(もっと読む)
カメラキャリブレーション装置および映像歪み補正装置

【課題】広角なレンズや複雑な歪曲を持つレンズを使用するカメラで生じる映像の歪みを関数モデルで高精度に近似し、近似した関数モデルを用いて歪みの補正を高精度に行うこと。
【解決手段】カメラキャリブレーション装置は、入力した映像に画像処理を用いて映像の歪みを検出し、映像の歪みを関数モデルで近似する関数モデル推定手段0104を備え、関数モデル推定手段は、映像の領域ごとに異なる関数モデルで映像の歪みを近似する。映像歪み補正装置は、歪み情報格納手段0611の格納する歪み情報を元に撮像手段の出力する映像を画像処理し映像の歪みを補正する歪み補正手段0612を備え、歪み情報格納手段は、歪み情報として、映像の歪みを領域ごとに異なる関数モデルで近似したときの関数モデルを格納し、歪み補正手段は、映像の領域ごとに応じた関数モデルに従って歪み補正を行う。
(もっと読む)
カメラ画像のひずみ補正方法、ならびにカメラ画像のひずみ補正制御装置
【課題】本発明の課題は、ステレオビデオ画像のひずみ補正においてリアルタイム処理で必要とされる程度まで、記憶データ量および転送データ量を低減することである。
【解決手段】前記課題は、インタフェースを介して、ひずみが生じたカメラ画像(215,216)のひずみが生じた複数の画素を受信するステップと、前記ひずみが生じたカメラ画像をひずみ補正するための圧縮されたひずみ補正規則(617,618)を準備するステップと、前記ひずみ補正規則を復元するステップと、前記ひずみ補正規則を使用して、ひずみが生じた前記複数の画素から、ひずみ補正後のカメラ画像(223,224)のひずみ補正される複数の画素を求めるステップとを有することを特徴とする方法によって解決される。
(もっと読む)
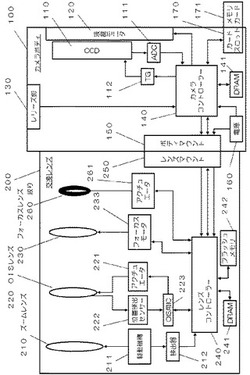
レンズ装置および撮影システム
【課題】レンズ装置からカメラ装置に収差補正データを送信する際の通信負荷を軽減する。
【解決手段】レンズ装置1は、カメラ装置12に取り外し可能に装着される。レンズ装置は、撮影光学系20と、該撮影光学系を通してカメラ装置により撮影された画像に対して、撮影光学系の収差に応じた補正処理を行うために用いられる収差補正データを記憶したメモリ4と、収差補正データをカメラ装置に送信するデータ送信手段2とを有する。データ送信手段は、収差補正データの中から、その一部である部分データを、撮影光学系に含まれる光学調節部材の位置または状態とカメラ装置に設けられた撮像素子に関する情報とに応じて選択し、該部分データをカメラ装置に送信する。
(もっと読む)
撮像装置、撮像方法及びプログラム
【課題】可視光通信用と画像撮影用の撮像部の視差を考慮し、且つ撮影条件等が異なる場合であっても正確に一方の撮像部で得た情報を他方の画像に正確に反映させる。
【解決手段】可視光通信用の第1の撮影部IS1と、第1の撮影部IS1と近接配置された画像撮影用の第2の撮影部IS2と、第1の撮影部IS1で得る画像中から可視光通信の光源箇所を特定し、情報を復調する可視光通信復調系15,16,26,27と、第1及び第2の撮影部IS1,IS2の各撮影画角と、第1及び第2の撮影部IS1,IS2の各解像度の比とにより可視光通信受信手段で特定した時間的な輝度変化を生じている箇所の位置を補正する座標変換処理部28と、可視光通信復調系15,16,26,27で復調した情報を、座標変換処理部28で補正した位置に応じて第2の撮影部IS2で得た画像上に合成する画像処理部31と、画像処理部31で合成した画像を表示する表示部21とを備える。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】撮影レンズの特性データがデジタルカメラ内に保存されていない場合等、何らかの理由で撮影者の意図する画像処理が行われずに記録された画像データについて事後的に撮影者の意図に沿う画像処理を実施できるようにする。
【解決手段】パーソナルコンピュータ等の情報処理装置において、外部装置から取得した画像データに、該画像データに所定の画像処理が実施されていない旨を示す画像補正処理フラグを確認した場合、画像補正処理フラグの示す内容に応じて、画像データに対して所定の画像処理を実施するか否かを切り替える。(ステップS506、S507)。
(もっと読む)
撮像システム
【課題】各ユニットの複数のファームウェアを1つの統合ファームウェアとし、全ユニットのバージョンアップを可能に、またバージョン管理を容易にし、バージョンアップ処理の効率化を図る。
【解決手段】カメラシステムの電源をオンで、レンズユニット1と本体ユニット2間で通信I/F11,12を介してユニット情報を授受する。ユニット2は受信したユニット情報に基づき、メモリカード27または記憶部22の統合ファームウェア内に該当するファームウェアの有無を確認する。ユニット1へ該当するファームウェアの有無の情報を通知し、有る場合は続けて統括ファームウェアを送信する。また無い場合は無しの情報を通知する。ユニット1で有の情報を受けると、その後、受信した統括ファームウェアを記憶部12にコピーし、該当するファームウェアに更新して、更新処理の結果をユニット2に送信する。この処理の結果から各ユニットはユニット情報を更新する。
(もっと読む)
情報処理装置
【課題】電源をON状態にしてから実際に起動するまでの期間を短縮できる情報処理装置、またはそのような情報処理装置を備えたデジタルカメラを提供する。
【解決手段】情報処理装置2は、プログラムが入力されることによりプログラムに対する処理を実行する少なくとも二つ以上のCPUと、これらCPUのそれぞれに対応したプログラムが所定の容量以下に分割されて格納されたROM111と、ROM111から読み出されたプログラムを、このプログラムに対応するCPUに出力されるよう振り分けるBufRAM制御部110とを備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】撮像装置の機種、印刷装置の機種に依存せず、印刷された画像を観察する際に、撮影時にユーザが感じたコントラスト感を再現する。
【解決手段】目標階調テーブル作成部110は、撮像装置により画像データを取得する際のコントラスト感度を推定するとともに、印刷装置により印刷された画像データを観察する際のコントラスト感度を推定する。目標階調テーブル作成部110は、推定したコントラスト感度に基づいて、撮像装置における画像データの入力値と印刷装置における画像データの出力値との関係を表す第1の階調特性を設計する。テーブル作成部104は、第1の階調特性と撮像装置における第2の階調特性と印刷装置における第3の階調特性とに基づいてルックアップテーブルを生成する。階調変換部102は、ルックアップテーブルを用いて撮像装置により取得された画像データを階調変換する。
(もっと読む)
撮像装置
【課題】ユーザの好みの撮影条件を迅速に設定した上で被写体を撮影することができる高機能な撮像装置を提供する。
【解決手段】被写体の光学像を電気的な画像信号に変換して画像を出力する撮像素子と、撮影条件を設定する複数のアルゴリズムと前記アルゴリズムに関連付けられた見本画像とを記憶するメモリ部と、前記撮像素子からの画像と前記複数の見本画像とを比較し、前記撮像素子からの画像に最も類似する前記見本画像を選択し、選択された前記見本画像に対応する前記アルゴリズムを選択する画像比較部と、前記選択されたアルゴリズムに基づいて撮影時における撮影条件を設定する撮影条件設定部と、を備える撮像装置。
(もっと読む)
像振れ補正装置および撮像装置
【課題】角度振れと平行振れがどのような状態で混在していても、制御が破綻することのない正確で、撮影光学系の主点位置の変化に対応した像振れ補正演算を可能にする。
【解決手段】像振れ補正装置に加わる角速度を検出して出力する角速度検出手段130と、像振れ補正装置に加わる加速度を検出して出力する加速度検出手段121と、撮影光学系105の主点位置Aを算出する主点位置算出手段106と、角速度検出手段の出力に基づいて、撮影光学系の主点中心の自転角速度成分を演算する自転角速度演算手段301と、加速度検出手段の出力と自転角速度演算手段の演算結果に基づいて、被写体中心の公転角速度成分を演算し、主点位置算出手段により算出された主点位置に応じて、演算した公転角速度成分を補正する公転角速度演算手段304と、自転角速度成分と補正された公転角速度成分の差分に基づいて像振れ補正制御を行う制御手段108とを有する。
(もっと読む)
高精細映像信号処理装置
【課題】画像処理方式の変更にもFPGAによる補正処理の共用化が可能な、高精細画像信号処理装置を提供すること。
【解決手段】FPGA1〜FPGAnの夫々を備えた信号処理回路10〜15の入力側と出力側に高速クロスポイントスイッチ8、16を設け、処理ユニット7全体としての画像処理方式の切り替えに必要な信号処理回路10〜15の入力側と出力側での接続変更がクロスポイントスイッチ8、16のクロスポイントの選択により得られるようにしたもの。
(もっと読む)
画像形成装置、プログラム、及び方法
【課題】適切に被写体に奥行きを付けた画像を形成する画像形成装置、プログラム、及び方法を提供する。
【解決手段】画像と、該画像のそれぞれの領域の被写体距離情報を取得する画像取得部と、前記画像内にある複数の注目被写体をそれぞれ特定する注目被写体特定部と、前記注目被写体の画像及び前記被写体距離情報の少なくとも一方に基づいて、前記画像を立体的に表現する場合の前記注目被写体の高さを前記注目被写体毎に決定する高さ決定部と、前記被写体距離情報に基づいて決まる前記注目被写体の形状を、前記高さ決定部が決定した前記注目被写体毎の高さに収まるように縮小する高さ縮小部と、前記高さ縮小部が縮小した形状で前記注目被写体が表現された画像を形成する画像形成部とを備える。
(もっと読む)
ファイル生成装置、ファイル生成方法、及びファイル生成プログラム
【課題】連写により得られた複数の静止画像を連続再生することにより動画のように再生させる際に、静止画像の数が少ない場合であっても、動画として再生するメリットを失わせないようにできるファイル生成装置を提供すること。
【解決手段】複数のフレーム画像データからなる画像データに、それら複数のフレーム画像データそれぞれの再生順を示すインデックス情報を付加して動画像ファイルを生成するデジタルカメラ(1)は、画像データを再生する際の各フレーム画像データの再生回数を含む再生方法を設定する設定手段(5)と、前記インデックス情報を、設定手段によって設定された再生回数に基づいて生成する生成手段(5)と、生成手段によって生成されたインデックス情報を設定手段によって設定された再生方法に基づいて画像データに付加してファイルを生成する付加手段(5)と、を備える。
(もっと読む)
撮像装置
【課題】 NDフィルタ切替により発生するメカ音や影が見えることが、特定の被写体輝度でNDフィルタの切替頻度が高いことにより目立つ。
【解決手段】 被写体輝度をみて、NDフィルタの切替頻度を下げるようにプログラム線図を切り替える。
具体的には、高輝度時には低輝度側でNDフィルタの切替を行ない、低輝度時には高輝度側でNDフィルタの切替を行なう。
(もっと読む)
放射線検出装置
【課題】電子カセッテの連続使用時間、通信性、耐荷重性の性能を両立し、使い勝手や収納等の利便性に優れた放射線検出装置を提供する。
【解決手段】透過放射線画像情報に変換する放射線検出器44と、前記透過放射線画像情報を記憶する画像メモリ122と、を備えるカセッテ本体30と、前記カセッテ本体30を収容可能であり、該カセッテ本体30の収容状態下に該カセッテ本体30と電気的に接続されるケーシング32と、を有する電子カセッテであって、前記カセッテ本体30は、前記画像メモリ122に記憶された前記放射線画像情報を無線通信により送信するカセッテ本体送受信機52と、前記カセッテ本体30に電力を供給する内蔵バッテリ48と、を有し、前記ケーシング32は、前記画像メモリ122に記憶された前記放射線画像情報を無線通信により送信するケーシング送信部130と、前記カセッテ本体30に電力を供給する外付バッテリ68と、を有する。
(もっと読む)
電子カメラ、画像処理装置及び画像処理方法
【課題】対象物が急激に動くなどにより入力画像において対象物の像の特徴量が変動した場合であっても、対象物を安定して追跡することが可能な画像処理装置を提供する。
【解決手段】入力画像において追跡の対象となる対象物の像を追跡する画像処理装置10であって、入力画像において、当該入力画像より時間的に前に撮影された画像を用いて決定される領域であって対象物の像を含む領域である探索領域のブレを示す軌跡であるブレ軌跡を検出するブレ検知部12と、ブレ検知部12によって検出されたブレ軌跡の端点を用いて、対象物の像を含む領域であって探索領域よりも小さい領域である対象領域を特定することにより、対象物の像を追跡する追跡処理部13とを備える。
(もっと読む)
撮像装置および撮影レンズユニット
【課題】連写速度をさらに向上させることが可能な撮影技術を提供する。
【解決手段】撮像装置1は、或る撮影画像GA1,GA2を含む複数の撮影画像を連続的に取得する連写モードを設定する連写モード設定手段と、撮影光学系の絞りを制御する絞り制御手段とを備える。絞り制御手段は、連写モードにおいて、撮影画像GA1の露光時から撮影画像GA2の露光時までの期間中(時刻T14〜T25等)に絞りを駆動することなく、撮影画像GA1の露光時における絞り状態を撮影画像GA2の露光時まで継続する。
(もっと読む)
物体数計測方法、物体数計測装置、物体数計測プログラム及びこのプログラムを記録した記録媒体
【課題】広視野の撮影範囲内の物体数を直接計測する。
【解決手段】物体抽出処理部4は画像蓄積部3から取得したカメラ2が作成した全方位画像から物体(例えば人)を含んだ画像領域を抽出する。有効領域判定部5は前記抽出された画像領域に含まれる物体の数の計測に有効な画像領域を撮像装置の視野特性に基づき判定する。荷重値テーブル生成部7は前記判定された有効な画像領域を構成する各画素に投影される視体積のうち前記物体の体積に寄与する体積を算出し、これに基づき前記各画素が物体の数にどれだけ寄与するかを示す荷重値を算出し、これを格納させた荷重値テーブルを生成する。人数計測部8は前記抽出された画像領域における各画素が前記判定によって有効領域と判定された場合のみ前記荷重値テーブルに格納された当該各画素の荷重値を積算することにより前記物体の数を計測する。
(もっと読む)
三次元計測用画像撮影装置及びその方法
【課題】撮影の進捗状況を把握でき、撮影を過不足なく効率的に行なえる三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1は、測定対象物2を単カメラにより撮影する装置で、撮影画像を取得する撮影部3、撮影画像から特徴点を抽出する特徴点抽出部61、撮影画像を3以上の特徴点で囲まれた撮影領域に区分する撮影領域区分部81、区分された撮影画像を記憶する撮影領域画像記憶部54、特徴点の三次元座標を求める三次元位置測定部7、測定対象物2の撮影範囲を三次元空間に表現する撮影範囲画像に各特徴点を書き込み、これらの特徴点を結線して撮影領域に区画する撮影範囲画像形成部85、撮影不足領域の有無を判定する撮影不足領域判定部86、撮影範囲画像を表示する表示部4を備える。
(もっと読む)
81 - 100 / 677
[ Back to top ]