
Fターム[5C122HA65]の内容
スタジオ装置 (397,422) | 一般技術 (37,735) | 電子回路技術 (8,743) | 記憶素子及びその制御 (3,593) | ROM/LUT (801)
Fターム[5C122HA65]の下位に属するFターム
テンプレート (124)
Fターム[5C122HA65]に分類される特許
21 - 40 / 677
画像処理装置
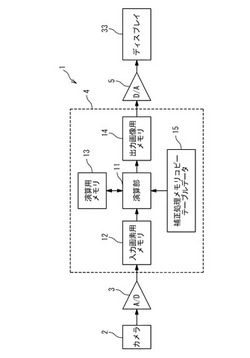
【課題】歪補正処理装置のコストの増加を抑制しつつ、歪みを有する画像に対し、その歪みを適切に補正する技術を提供する。
【解決手段】入力画像に含まれる画像歪を補正して出力画像を生成する演算部(11)と、入力画像を示す入力画像信号をAD変換して得られた入力画像データを保持する入力側メモリ(12)と、出力画像に対応する出力画像データを保持する出力側メモリ(14)と、画素データを記憶する記憶領域を有する演算用メモリ(13)と、画像歪を補正するときに参照される補正処理メモリコピーテーブルデータ(15)とを具備する画像処理装置(4)を構成する。
演算部(11)は、処理対象画素情報(25)に複数の処理対象画素が示されているとき、複数の処理対象画素に対応する画素データを1回のデータ処理で処理する。
(もっと読む)
ジェスチャ認識装置、ジェスチャ認識方法、制御プログラム、および、記録媒体

【課題】使用場所の明るさを問わずに、高速処理かつ高精度の非接触型の入力機能を実現する。
【解決手段】本発明のジェスチャ認識装置1は、複数の赤外線センサが配置されて構成された温度センサチップ6と、上記温度センサの赤外線センサそれぞれが検知した温度に基づいて、温度変化が生じた変化領域を、手を示す領域として特定する変化量算出部32と、上記変化領域特定手段が特定した変化領域の移動軌跡を特定して、手のジェスチャを認識するジェスチャ認識部34とを備えていることを特徴としている。
(もっと読む)
固体撮像装置
【課題】画質の低下を抑制しつつ、動画に対してフリッカを抑圧することが可能な固体撮像装置を提供する。
【解決手段】信号処理回路14は、画素部Gの信号から測定された光量測定値AEに基づいて、偶数ラインの蓄積時間Tint1および奇数ラインの蓄積時間Tint2をフレームごとに制御させ、フリッカ補正回路11は、蓄積時間が互いに異なるラインごとの画素の信号OUTPに基づいて、画素部Gにて撮像された信号OUTPに発生するフリッカをラインごとに補正する。
(もっと読む)
撮像装置と画像処理方法
【課題】パノラマ画像を生成する場合に処理負荷が低く使用するメモリを少なくできるようにする。
【解決手段】撮像方向の移動中に生成された複数の撮像画像を圧縮処理してメモリ領域MAに記憶させる。メモリ領域MAに記憶されている撮像画像からパノラマ画像の生成で合成される部分画像を抽出してメモリ領域MCに記憶させる再記憶を行う。再記憶後に、メモリ領域MAを部分画像のパノラマ合成のためのメモリ領域MDとして用いる。リアルタイムで部分画像の抽出を行う必要がなく処理負荷を低くできる。撮像画像を記憶するメモリ領域とパノラマ合成で使用するメモリ領域を個々に設ける必要がないので、使用するメモリを少なくできる。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
撮像装置及びその制御方法
【課題】複数の照明手段を不要にするとともに処理負荷を抑えて、望ましい陰影を持つ被写体写真を得ることができるようにする。
【解決手段】被写体を撮像して画像信号を生成し、前記撮像された被写体の主要要素を検知する。そして、予め記憶されている互いに異なる方向からの光線に対する複数の陰影パターンのうち、ユーザーにより指定された陰影パターンの位置及び形状を、前記検知された被写体の主要要素の位置に基づいて変更し、前記変更された陰影パターンが前記被写体と重なるように前記画像信号に係る画像を合成し、前記合成した画像を表示するようにして、望ましい陰影を持つ写真が得られるようにする。
(もっと読む)
内視鏡装置
【課題】半導体発光素子を用いて広いダイナミックレンジと高い光量分解能を確保し、高精度に光量制御が可能な内視鏡装置を提供する。
【解決手段】内視鏡装置は、照明光を生成する半導体光源と、電子シャッタにより露光期間を調整する撮像手段と、入力される目標光量に応じて半導体光源をパルス点灯駆動する光源制御手段とを備える。光源制御手段は、目標光量の高い順に、電子シャッタによる1フレーム内の露光期間に対し、所定の点灯期間になるまで駆動パルスのパルス数を減少させて半導体光源の点灯期間を短縮する第1のパルス変調(PNM)制御と、所定の点灯期間に対し、所定間隔で駆動パルスを間引くことで点灯期間内のパルス密度を減少させる第2のパルス変調(PDM)制御と、第2の制御範囲において最小パルス数とされた各駆動パルスに対し、パルス幅を減少させる第3のパルス変調(PWM)制御とを行うようにした。
(もっと読む)
電子機器
【課題】時間の経過とともに変化する環境信号の変化量に応じて、起動させる動作を選択することができる。
【解決手段】センサからの出力を受ける電子機器であって、前記センサから入力される環境信号を所定のサンプリング間隔で取得する環境信号取得部と、前記取得された環境信号を少なくとも次のサンプル区間が到来するまで保持する環境信号保持部と、前記取得された環境信号である第1の環境信号と前記環境保持部により保持されている少なくとも1サンプル区間前に取得された環境信号である第2の環境信号との差分である差分量を取得する差分量取得部と、前記取得された差分量に基づいて起動させる動作を選択する動作選択部と、を有する電子機器。
(もっと読む)
焦点検出装置および撮像装置
【課題】焦点調節を行うために採用した焦点検出エリアを表示する。
【解決手段】結像光学系による画面内の画像情報を撮像素子により取得し、基準とする像に関する基準情報と画像情報とに基づいて画面内における対象の領域50を検出するとともに、画面内に設定された複数の焦点検出位置45における結像光学系の焦点調節状態を検出し、対象の領域の検出結果と焦点検出結果とに基づいて複数の焦点検出位置のいずれかを選択し、選択された焦点検出位置が対象の領域内またはその近傍にある場合には、対象の領域の中央に最も近い焦点検出位置46を表示する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】シェーディング補正用の補正情報の算出を簡便に、且つ、適正に行う。
【解決手段】撮像装置100であって、撮像レンズ部1に入射される光量が略等しい条件下で電子撮像部2により撮像された所定の画像を取得する画像取得部5aと、この所定の画像の画素値に基づいて、当該画素値の強さの分布における基準位置を算出する第1算出部5bと、所定の画像における画素値の強さの分布の基準位置から当該所定の画像の各隅部までの各距離を基準として、撮像素子から出力される画像情報における複数の画素の画素値のシェーディング補正用の補正情報を算出する第2算出部5cとを備えている。
(もっと読む)
撮像装置
【課題】 メカシャッタを用いずに、画面内の明暗差のないグローバルシャッタ撮影を可能にした撮像装置を提供すること。
【解決手段】 光電変換により得られた1フレーム分の画像信号を読み出すことが可能な撮像素子を有する撮像装置において、配光特性を変化させることが可能な発光手段と、前記画像信号を読み出す際に生じる画面内の明暗差に応じて前記発光手段の配光を制御する配光制御手段を備えていることを特徴とする構成とした。
(もっと読む)
撮影条件生成装置、撮像装置および撮影条件生成プログラム
【課題】ユーザの撮影意図を反映させた撮影条件を設定する。
【解決手段】撮影条件生成装置であって、ユーザが指定する削除対象の撮影画像データに対して、撮影画像データが生成された撮影時の撮影環境情報を抽出する抽出部と、抽出された撮影環境情報に基づいて撮像装置の撮影条件を生成する生成部とを備える。上記撮影条件生成装置は、現在の環境情報を取得する取得部を備え、生成部は、取得部が取得した現在の環境情報に基づいて撮影条件を生成する。
(もっと読む)
撮像装置及び方法、並びにプログラム
【課題】GPSによる位置情報が取得できない環境下においても、ユーザによる簡単な操作のみで位置情報を取得して撮像時の画像データと共に記録する処理を実現すること。
【解決手段】表示制御部33は、撮像時点に、位置情報取得部31による位置情報の取得が失敗した場合、撮像前に位置情報取得部31により取得された位置情報に基づいて、地図の表示を制御する。選択受付部34は、表示制御部33により表示が制御された地図から、ユーザにより選択された位置を受け付ける。記憶制御部32は、撮像時点に、位置情報取得部31による位置情報の取得が成功した場合、当該位置情報を、撮像部13から出力された画像データに関連付けて記憶し、撮像時点に、位置情報取得部31による位置情報の取得が失敗した場合、選択受付部34により受け付けられた位置を示す位置情報を、撮像部13から出力された画像データに関連付けて記憶する制御を実行する。
(もっと読む)
画像処理装置
【課題】垂直化変換及び平行化変換の両変換を保つ画像を生成することができる画像処理装置を提供する。
【解決手段】実施形態の画像処理装置は、複数の撮像部と、校正部と、を備える。複数の撮像部は、それぞれの光学中心を結ぶベースラインベクトルと平面の法線ベクトルとが直交するように配され、重複する領域を撮像する。校正部は、撮像された複数の画像を校正して、前記複数の画像それぞれのレンズ歪みが補正され、前記複数の画像の間で、対応する画像内の位置が水平に一致され、かつ平面に垂直な面に合わせられた複数の校正画像を得る。
(もっと読む)
カメラ管理装置、ネットワークカメラシステム、ネットワークカメラ制御方法、ネットワーク機器制御方法
【課題】ネットワークカメラが撮影した映像によりネットワークカメラを制御することが可能なカメラ管理装置、ネットワークカメラシステム、ネットワークカメラ制御方法、ネットワーク機器制御方法を提供する。
【解決手段】ネットワークを介してネットワークカメラと接続されたカメラ管理装置であって、ネットワークカメラが撮影した、ネットワークカメラを制御するための制御情報を含む映像データをネットワークカメラから受信する映像受信部と、映像受信部が受信した映像データから制御情報を抽出する制御情報抽出部と、ネットワークを介して制御情報に応じた制御コマンドをネットワークカメラに送信する制御送信部と、を備える。
(もっと読む)
車載カメラ制御装置および車載カメラ制御システムならびに車載カメラ制御方法
【課題】監視動作の中断が生じる頻度を小さくすると共に、常に所望の領域の全体を監視することが可能な車載カメラ制御装置を提供する。
【解決手段】車両の運行業務に関する稼働時間の予定を表す稼働予定情報と現在時刻とに基づき前記車両の稼働時間外か否かを識別する稼働時間識別部15と、稼働時間外である場合に前記車両の駐車位置の情報を取得し駐車位置に対応付けられた撮影方向の情報を取得し前記撮影方向に合わせて車載カメラの姿勢調整機構を駆動する撮影方向制御部20と、稼働時間外か否かに応じて車載カメラの撮影モードを切り替え、前記稼働時間外の場合には前記車載カメラから出力される画像データを所定の無線通信回線を経由して車両外の管理装置に向けて送出する撮影モード識別部17とを備える。
(もっと読む)
撮像装置および電子機器
【課題】 撮影条件に応じて手ぶれ補正に用いる位置制御の精度を変化させることができる撮像装置および同撮像装置を含む電子機器に関する。
【解決手段】 撮像光学系の光学レンズを介して受光した光を電気信号に変換する撮像素子と、撮像光学系の撮像条件を設定する条件設定手段と、手ぶれを検出する手ぶれ検出手段と、撮像素子の位置を検出する位置検出手段と、手ぶれ検出手段の検出結果と、位置検出手段の検出結果と、に基づいて撮像素子を移動させる移動手段と、を備え、設定された撮像条件に応じて位置検出手段の検出精度を設定する精度設定手段と、を有してなる撮像装置による。
(もっと読む)
撮像装置
【課題】イメージセンサに可視光と共に赤外光を捕捉できる撮像素子を用いることで、暗時における画像認識性能を向上する撮像装置において、ランダムノイズを抑える。
【解決手段】ステップS5で、可視光成分WYRおよび赤外光成分Irを相互に加算して輝度信号Yaddを求めることで、暗時における画像認識性能の向上を図る。一方、ステップS2で各種補正を行った後、前記輝度信号Yaddを使用可能にするために、ステップS3で可視光成分RGBを可視輝度信号Yおよび色差信号Cb,Crに変換し、ステップS4’で偽色抑制のためのローパスフィルタ処理を行う。その後、ステップS6で、Yadd/YLによってCb,Crを正規化してCbadd,Craddを求め、カラーバランスを維持する。ここで、ステップS10で、LPF処理におけるカットオフ周波数fcを、赤外光成分Irが大きくなる程低下しておくことで、ランダムノイズを抑える。
(もっと読む)
画像補正装置、補正画像生成方法、補正テーブル生成装置、補正テーブル生成方法、補正テーブル生成プログラムおよび補正画像生成プログラム
【課題】補正後の画像における違和感を低減ないし解消することを課題とする。
【解決手段】前記課題を解決するために、本発明の画像補正装置10は、画像入力部11と、画像記憶部12と、補正テーブル記憶部15と、画像記憶部に記憶された入力画像を補正テーブルに基づいて幾何補正する幾何補正部13と、幾何補正部により補正された入力画像を補正画像として出力する画像出力部14と、を備え、補正テーブル17は、補正画像となる出力画像上の各画素位置に対応する角度の組(θ、φ)を算出し、入力画像の投影中心を原点とする3次元直交座標系において、YZ平面をY軸の周りにθだけ回転させた平面と、XZ平面をX軸の周りにφだけ回転させた平面との交線に基づいて光線方向を算出し、光線方向に対応する入力画像上の位置を抽出位置として算出し、抽出位置を出力画像の画素位置に対応付けていることにより生成されたものであることを特徴とする。
(もっと読む)
画像処理方法および画像処理装置
【課題】歪み補正後の絵柄の形状が折れ線状にならず、滑らかに変化する形状に補正可能な画像処理方法および画像処理装置を提供する。
【解決手段】歪み補正後画像の着目画素を表す極座標の角度OTより、着目画像を間に挟む2軸に設定された歪み量テーブルA,Bを選択し、距離ORに応じた歪み量A,Bを算出する。角度OTの三角関数から補間係数を求めて歪み量A,Bを補間し、補間歪み量Cを用いて距離ORを補正する。角度OTと補正した距離IRとで表される極座標を直交座標に変換して、歪み補正前画像の着目画素を表す参照座標を得る。
(もっと読む)
21 - 40 / 677
[ Back to top ]