
Fターム[5C122HA79]の内容
Fターム[5C122HA79]に分類される特許
41 - 60 / 172
ステレオ画像撮影装置およびその方法

【課題】従来技術では、連写した画像列データから2枚の画像データを抽出してステレオ画像を撮影する場合、連写撮影枚数、連写時間を長く設定することで、多くの連写画像データを撮影でき、2枚の画像データの選択肢が増えるものの、すべての画像データを使用するわけではないので、必要以上に画像データを生成してしまう場合がある。
【解決手段】本発明のステレオ画像用撮像装置1000では、焦点距離、被写体までの距離、撮影モード(マクロ、人物、風景)に応じて、最大連写時間、連写枚数の最大値を設定する。最大連写枚数や最大連写時間を小さく設定することで、特にステレオベースが小さくなるように誘導することが可能となり、適切なステレオベースを選択しやすくなり、適切な立体感をもつ立体画像を撮影可能となる。
(もっと読む)
ラインスキャンカメラを使用してオンラインウェブを監視するシステム及び方法
様々な実施形態は、流れ方向(118)に装置に対して移動するオンライン製品ウェブを検査する装置を目的とする。装置は、視野(114)を画定し、視野が製品ウェブ(208)の部分を含むように配置されるラインスキャンカメラ(102)を含み得る。カメラ制御システム(104)は、カメラ(102)と電子通信し得、ウェブ速度センサ(110)から製品ウェブの速度を示すウェブ速度データを受信し、ウェブ速度データをライントリガ信号に変換するように構成され得る。ライントリガ信号は、流れ方向に不断の画素解像度を達成するために必要なカメラ画像キャプチャの時間周波数を示し得る。更に、カメラ制御システム(104)は、製品位置データを受信し、製品位置データを考慮するフレームトリガ信号を生成するように構成され得る。フレームトリガ信号は、画像フレームと画像フレームとの間で中断を示し得る。 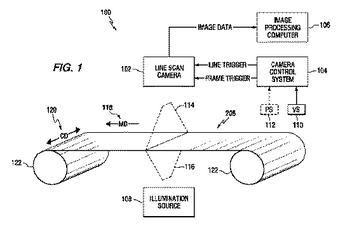 (もっと読む)
(もっと読む)
カメラ

【課題】被写体を所定の位置で確実にセルフタイマー撮影すること。
【解決手段】セルフタイマー撮影の際、RGB測光センサ16が被写体人物の肌色を周期的に検出する。移動速度検出部22が、RGB測光センサ16からの検出信号に基づいて撮影範囲内での被写体人物の移動速度が所定値以上であることを検出すると、セルフタイマー時間延長部23は、当初セットされたセルフタイマー時間を所定時間だけ延長する。
(もっと読む)
暗視装置における二元的焦点合せ用のシステムおよび方法
暗視光学装置において対物レンズアセンブリの焦点位置を制御するための焦点合せ装置および方法が提供される。焦点合せ装置は、画像形成装置から第1または第2の焦点位置に位置決めされる対物レンズアセンブリと、対物レンズアセンブリに結合されていて対物レンズアセンブリを第1または第2のいずれかの焦点位置まで画像形成装置に対して並進運動させるように構成される二元的焦点合せ制御装置と、を備える。対物レンズアセンブリは暗視光学装置の配向に応答して第1または第2のいずれかの焦点位置まで並進運動させられる。 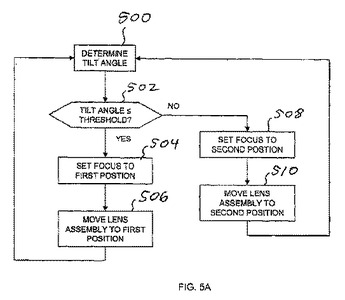 (もっと読む)
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】被写体領域の抽出の精度を向上させる。
【解決手段】撮像装置100であって、背景内に被写体が存在する被写体存在画像を撮像し、次に、被写体存在画像の撮像の際の撮像条件と同じ撮像条件で、被写体の存在しない背景画像を撮像する撮像手段としてのレンズ部1、電子撮像部2及び撮像制御部3と、被写体存在画像と背景画像との位置合わせを行った後、位置合わせされた被写体存在画像と背景画像との間で対応する各画素の差分情報を生成して、当該差分情報に基づいて被写体存在画像から被写体が含まれる被写体領域を抽出する画像処理部8とを備える。
(もっと読む)
携帯型広角映像記録システム
カメラモジュールの配列からなる、携帯型映像記録システムが開示されている。この装置はジャイロスコープを備え、繋ぎ合わされた広角の複写物からカメラの動きを外挿することが可能である。合成された一連のマスター画像から、撮影後の編集において画像フォーマットおよびフォーカスを選択することが可能であるため、撮影中に照準を合わせたり、手作業による設定をしたりすることが避けられる。  (もっと読む)
(もっと読む)
カメラ付きロボット
【課題】 ロボットアームに搭載されるカメラのシャッターチャンスを最適化し、組立作業効率を向上させる。
【解決手段】 フィンガー4上の点Fと、カメラ1の位置基準であるアライメントマーク3aに対する位置をカメラ1によって撮像し、画像処理によってカメラ1の位置を計測する。カメラ1の位置が予め設定された位置閾値以下で、かつ、カメラ1に搭載された速度センサ3によって計測されるカメラ1の移動速度が予め設定された速度閾値以下である時にカメラ1のシャッターを切る。あるいは更に、速度センサ3の微分値によって計測されるカメラ1の移動加速度が予め設定された加速度閾値以下である時と論理積を取ってシャッター切る。これによって、ワーク12を探索するための画像のブレを防ぎ、位置誤差を低減するとともに、シャッターを早く切ることで作業効率を向上させる。
(もっと読む)
撮像装置
【課題】使用者による撮影を補助する情報を必要なときに表示する撮像装置を提供することを目的とする。
【解決手段】本発明にかかる撮像装置は、光学系と、光学系により形成された被写体像を撮像する撮像素子と、撮像素子上に結像された被写体像のぶれを軽減する補正手段と、補正手段による被写体像のぶれを軽減可能な度合いを検出する軽減度合検出手段と、軽減度合検出手段による検出結果に基づいて閾値を決定する決定手段と、自機のぶれの速度を検出する速度検出手段と、速度検出手段による検出結果と決定手段により決定された閾値とを比較する比較手段と、表示手段と、を備え、表示手段は、比較手段による比較結果に応じて、自機の操作方法に関する警告表示を行うか否かを切り替える。
(もっと読む)
画像処理装置、画像処理方法及び表示装置
【課題】撮像画像を実際の景色を見回したような臨場感が得られるような画像とする。
【解決手段】画像処理部9では、抽出座標設定部101において、撮像画像の被写体像に対する視点の変移方向に沿って撮像画像における抽出座標を設定する。また、画像生成部103において、被写体像の直線歪みを補正した撮像画像から、その撮像画像の画角に対応して導き出される人間の視野角相当のサイズの領域を、抽出座標に基づいて順次抽出した複数の部分領域画像を生成する。画像出力部104は、生成した複数の部分領域画像をフレームとする動画像を出力する。
(もっと読む)
物体認識装置及び物体認識方法
【課題】ネットワークの負荷を軽減するとともに、認識に必要な入力映像のフレームレート及び解像度を容易に最適化できるようにする。
【解決手段】物体認識部212は、カメラ200において生成された所定時間分の映像データから物体を認識し、認識結果分析部213は、その認識結果を分析し、映像受信部211で受信したフレーム画像から物体認識部212で認識した映像中の顔の最小サイズと、移動速度とを求める。そして、映像処理制御パラメータ決定部216は、認識結果分析部213で求めた顔の最小サイズと移動速度とから、フレームレート及び解像度の下限値を決定する。
(もっと読む)
自動焦点調整装置
【課題】動画撮影時に光軸方向に移動している被写体に対し、様々な撮影環境、特に被写体のコントラストの低下および被写体移動速度変化のある環境において常に合焦状態を維持することが出来なかった。
【解決手段】撮影光束の少なくとも一部を光電変換するセンサと、センサの出力に基づきデフォーカス量を求めるデフォーカス量演算手段と、デフォーカス量に基づいてフォーカスレンズを駆動する駆動手段と、センサで電荷蓄積に費やすことができる最大蓄積時間を設定する手段と、を備える自動焦点調整装置において、最大蓄積時間内にセンサの電荷蓄積量が閾値に達する場合には閾値に達した時点で、また、最大蓄積時間内に閾値に達しない場合には最大蓄積時間経過時点で、デフォーカス量演算手段がセンサ出力を用いてデフォーカス量を演算し、該デフォーカス量を駆動手段に出力することを特徴とする構成とした。
(もっと読む)
カメラ
【課題】静止画撮影中に突然被写体が移動してしまったような場合でも、無駄な画像を極力撮影することなく、移動してしまった被写体の画像を得ることができるカメラを提供すること。
【解決手段】静止画撮影モード中にカメラ1の水平方向の加速度が所定値以上となったことが検出された場合に、カメラ1の動作モードを静止画撮影モードから動画撮影モードに切り替える。カメラ1の動作モードを動画撮影モードに切り替えることにより、突然移動してしまった被写体の動きを動画像として捉えることが可能である。
(もっと読む)
監視カメラ
【構成】イメージセンサ14は、被写界を捉える撮像面を有して被写界像を繰り返し出力する。パン回転機構32および/またはチルト回転機構34は、メインCPU30から発行されたパン/チルト回転指示またはパン/チルト停止指示に従って、撮像面の向きを変更する。撮像面の方向を示すパン/チルト角情報は、メインCPU30からカメラCPU28に転送される。パン/チルト情報を転送する処理は、周期的に実行されるとともに、パン回転機構32および/またはチルト回転機構34に向けて発行される指示の内容に変化が生じたときに実行される。カメラCPU28は、イメージセンサ14から出力された被写界像に、メインCPU30からのパン/チルト角情報を参照したマスク処理を施す。
【効果】マスク処理の精度を維持しつつ、マスク処理に要する負荷を低減することができる。
(もっと読む)
電子カメラ
【課題】撮像領域内に移動する複数の被写体像が捉えられる場合、その複数の移動物体の状況に応じてそのシーンを特徴的に表す瞬間を撮影する電子カメラを提供する。
【解決手段】移動する複数の被写体像を撮像した画像信号を出力する撮像素子と、画像信号に基づいて、被写体像の移動方向を算出する解析部と、少なくとも2つの被写体像に基づいて算出された移動方向に応じて、被写体像を撮影する撮影タイミングを異ならせる撮影制御部と、を備えることを特徴とする電子カメラである。
(もっと読む)
カメラ
【課題】レンズズーム中に生じる芯ズレにより、画像に像ゆれ等が発生することを防ぐ。
【解決手段】カメラは、被写体像を撮像素子6へ導く、ズーム可能な結像光学系2と、カメラのブレを検出するブレ検出手段14X、14Yと、ブレ検出手段14X、14Yにより検出されたブレに基づいて、光軸に直交する方向の結像光学系2と撮像素子6との相対位置を変更して撮像素子6上での像ブレを補正するブレ補正部材151と、結像光学系2のズーム位置を検出する位置検出手段20と、位置検出手段20により検出されたズーム位置に対応する結像光学系2の芯ズレ量を、ブレ補正部材151を用いて補正させる補正制御手段7とを備える。
(もっと読む)
動画像記録装置
【課題】
ファイルクローズの際の管理データの更新によっても、動画像記録が破綻しないようにする。
【解決手段】
MXF生成部(18)は、カメラ信号処理部(16)からの動画像データから、MPEG2の圧縮データを含むMXFファイルを生成する。MXGファイルはメモリカード(24Z)に記録され、ファイルフッタの記録後に、メモリカード(24)に記録済みのファイルヘッダとファイルボディの管理データが更新される。速度検出部(42)は、メモリカード(24)のアクセス速度を検出する。記録制御部(40)は、このアクセス速度に従い、1ファイル当たりの更新が必要な管理データ数が所定数以内になるように、ファイルサイズ又は管理データ数を制御する。
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】被写体領域の抽出の精度を向上させる。
【解決手段】撮像装置100であって、背景内に被写体が存在する被写体存在画像を撮像し、次に、被写体存在画像の撮像の際の撮像条件と同じ撮像条件で、被写体の存在しない背景画像を撮像する撮像手段としてのレンズ部1、電子撮像部2及び撮像制御部3と、被写体存在画像と背景画像との位置合わせを行った後、位置合わせされた被写体存在画像と背景画像との間で対応する各画素の差分情報を生成して、当該差分情報に基づいて被写体存在画像から被写体が含まれる被写体領域を抽出する画像処理部8とを備える。
(もっと読む)
光学機構
【課題】撮像素子を適用する撮像装置等に適用される光学機構において、連写撮影時におけるモータ動作を効率的に行うことにより消費電力を抑えることができ、高速連写にも対応可能な光学機構を提供する。
【解決手段】撮像光学系の光路上にミラーダウン位置と上記撮像光学系の光路上から退避するミラーアップ位置との間を往復する可動ミラー、または、撮像素子の露光時間を調節する機械式シャッタを付勢するバネのチャージを行うチャージレバー7と、回動を行う部材であって、チャージレバー7が行う上記チャージの量を調節するカム5と、上記チャージが解放されてから再度上記チャージが開始されるまでの期間中は、上記チャージが解放されるときのカム5の速度よりも低速でカム5を回動させ続ける回動速度制御を行う制御部15とを有する。
(もっと読む)
撮影装置
【課題】比較的簡単、ローコストな構成でありながら操作性の向上と省スペース化との両立を図ることができる。
【解決手段】デジタルカメラ10は、撮影レンズ13を覆い隠す閉位置と露呈させる第1開位置,第2開位置の間でスライド移動自在のレンズバリア12を備える。レンズバリア12には、加速度センサ18が組み込まれている。レンズバリア12が閉位置から第1開位置に移動すると、電源スイッチ17がオンになる。レンズバリア12を第1開位置から第2開位置に移動すると、加速度センサ18によりレンズバリア12の移動に伴う加速度が計測される。この加速度が、所定の閾値以上の場合、簡易メニューが、閾値未満の場合、詳細メニューが、それぞれLCDに表示される。
(もっと読む)
カメラシステム
【課題】 ピント振れの検出及び補正を被写体輝度に関わらず高精度に行えるようにする。
【解決手段】 カメラシステムは、光軸方向への振れ(ピント振れ)に対してフォーカスレンズ12の位置を追従させ前記ピント振れを補正する振れ補正部16と、焦点検出用撮像素子5と、加速度検出装置18を備える。さらに前記カメラシステムは前記焦点検出用撮像素子5もしくは前記加速度検出装置18により検出した情報を基に前記振れ補正部16に与える指令を演算するピント振れ補正量演算部210を有する。前記焦点検出用撮像素子5の蓄積時間が予め定められた値以下の場合には前記焦点検出用撮像素子5により検出した情報を用いてピント振れ補正を行う。また、前記蓄積時間が前記予め定められた値を越える場合には前記加速度検出装置18により検出した情報を用いてピント振れ補正を行う。
(もっと読む)
41 - 60 / 172
[ Back to top ]