
Fターム[5C122HB10]の内容
Fターム[5C122HB10]に分類される特許
141 - 160 / 3,259
撮影装置およびその制御方法
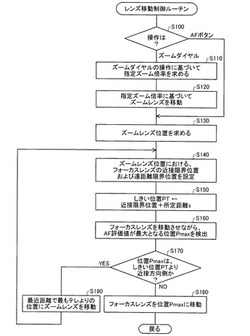
【課題】撮影時に標準モードとマクロモードの切り替えを操作者に意識させることなく、ピントの合った撮影を容易に行うことができるようにすることである。
【解決手段】入力されたズーム操作に基づいてズームレンズを移動させることで、像を変倍し(S120)、移動されたズームレンズの位置における、フォーカスレンズの被写体に対する近接限界位置を求め(S130、S140)、ズームレンズが移動された後の状態で像が合焦状態を維持するために必要となるフォーカスレンズの目標位置が、近接限界位置に基づいて求まるしきい位置よりも撮像面側にあるときに、フォーカスレンズを移動させることで、像を撮像面に合焦する(S150〜S180)。一方、フォーカスレンズの目標位置がしきい位置よりも被写体側にあるときに、ズームレンズをワイド側に移動した上で(S190〜、合焦のためのフォーカスレンズの移動を行う(S140〜S180)。
(もっと読む)
画像処理装置及び画像処理方法

【課題】レンズ特性により画像劣化が画面内位置で異なる場合にも、各位置の劣化状態に応じて最適に復元処理を行うとともに、演算量を大幅に低減すること。
【解決手段】分散値テーブルは、画面内の各格子点でのPSF係数の分散値を格納し、PSF係数テーブルは、分散値とPSF係数の対応関係を格納する。これらの値は、画面水平方向と画面垂直方向の成分に分けて格納する。分散値算出部は、分散値テーブルを参照して処理対象画素での分散値を求め、PSF係数算出部は、PSF係数テーブルを参照して処理対象画素のPSF係数を出力する。水平及び垂直コンボリューション処理部は、水平及び垂直方向のPSF係数を用いて水平及び垂直方向の畳み込み演算を行い、劣化画像を復元する。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 複数の視点から被写体を撮像して得られた複数の撮像画像データから、出力画像を示す出力画像データを生成する際に、画質を保ちつつ、計算コストを低減させることを目的とする。
【解決手段】 複数の撮像画像データを入力し、出力画像のピント距離を示すピントパラメータを入力し、被写体までの距離の情報を示す距離情報とピントパラメータとに基づいて、ピント距離よりも手前に被写体が存在する前ぼけ領域と、前記ピント距離よりも奥に被写体が存在する後ぼけ領域とを特定し、前ぼけ領域と前記後ぼけ領域とで異なる数の撮像画像データを用いて、出力画像データを生成する。
(もっと読む)
撮像装置
【課題】 精度良く任意の位置での対象物の焦点位置を決定し、対象物の全体画像を短時間で取得すること
【解決手段】 対象物の表面形状を計測する計測部と、光源からの光で前記対象物を照明する照明光学系と、前記光で照明された対象物を結像するための撮像光学系と、前記撮像光学系の像面に配置された複数の撮像素子と、前記対象物の合焦位置検出点が前記像面に結像するときの前記対象物の位置である合焦位置を検出するための合焦位置検出手段と、を有する撮像部とを備え、前記撮像部は、前記合焦位置検出手段の検出結果と前記計測部の計測結果とを用いて、前記対象物の前記合焦位置検出点とは異なる点における前記対象物の合焦位置を決定する合焦位置決定手段を有し、前記合焦位置決定手段の決定結果を用いて前記対象物を前記複数の撮像素子に合焦させた状態で撮像することを特徴とする。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】通常のフレームレートでは露光時間が不足する場合でも、フレームレートの低下の少ない動画像を出力することを目的とする。
【解決手段】カメラにより撮像された動画像を処理してディスプレイに表示させる画像処理装置は、画像と露光時間とを記憶する画像記憶部と、カメラから画像および露光時間を取得して、画像と露光時間とを時系列に画像記憶部に記憶させる画像取得部と、画像記憶部に記憶された画像から照度を推定し、照度に対応する第一露光時間を算出する第一露光時間算出部と、取得された画像の露光時間が第一露光時間よりも短い場合に、最新のフレームの画像の露光時間と過去のフレームの画像の露光時間とを積算して第一露光時間に合致させ、合致させたときに使用した複数の画像を特定する画像特定部と、特定した複数の画像をフレーム加算して出力画像を生成する出力画像生成部と、生成した出力画像をディスプレイに出力する出力部とを有する。
(もっと読む)
位相差検出装置
【課題】 同一画素内に遠近競合の物体像があった場合でも、位相差検出する。
【解決手段】 物体像が一対の結像光学系によって結像される一対のセンサを、第1の一対のラインセンサと、第1の一対のラインセンサと隣接している第2の一対のラインセンサとで構成する位相差検出装置であって、第1の一対のラインセンサおよび第2の一対のラインセンサから得られた像信号を用いてそれぞれ第1の相関度および第2の相関度を算出する相関度算出手段(306、308)と、第1の相関度および第2の相関度のうちいずれか一方の相関度が所定の閾値よりも低い時(309)には相関度の高い結果が得られた一対のラインセンサの像信号を用いて相関度の低い結果が得られた一対のラインセンサの像信号を補正する像信号補正手段(312)と、像信号補正手段によって生成された補正像信号を用いて再度相関演算する補正相関演算手段(312)とを有する。
(もっと読む)
画像処理システム
【課題】球面収差復元用の復元フィルタを補正した補正フィルタでボケを復元する。
【解決手段】撮像装置100は撮影光学系110により結像された結像画像を用いて再生画像を作成する。撮像装置100は再生画像のボケを復元する。再生画像のボケの度合いは方向に応じて異なる。撮像装置100はEEPROM107とDSP103とを有する。EEPROM107は復元フィルタを補正した補正フィルタを格納する。DSP103は補正フィルタにより再生画像のボケを復元する。
(もっと読む)
焦点調節装置および撮像装置
【課題】好適な焦点調節が可能な焦点調節装置を提供する。
【解決手段】焦点調節光学系32を有する光学系による像面のずれ量を検出する焦点検出部21と、焦点調節光学系32を光軸方向に駆動させることで、光学系の焦点調節を行う焦点調節部36と、ずれ量が検出できたか否かを判断する判断部21と、焦点調節光学系32が駆動していない状態において、ずれ量が所定回数以上検出されるまで、焦点調節部36による焦点調節光学系32の駆動を禁止し、ずれ量が所定回数以上検出された場合に、焦点調節部36による焦点調節光学系32の駆動を許可する駆動制御処理を行う制御部21と、を備えることを特徴とする焦点調節装置。
(もっと読む)
画像処理装置および画像処理方法
【課題】多視点画像から鮮鋭な画像を合成する。
【解決手段】多視点で撮影された複数枚の入力画像を合成し新たな画像を生成するにあたって、各入力画像ごとに、合成によりフォーカスされる被写体の位置に応じて定まる仮想センサ上の投影領域に含まれる画素のそれぞれの画素に対して、合成のための使用率を設定する。合成画像の画素位置に重なった複数の入力画像の画素値に使用率を掛け合わせたをものを平均し合成画像の画素値とすることにより、鮮鋭な合成画像を得る。
(もっと読む)
光学系、この光学系を有する撮像装置、及び、光学系の製造方法
【課題】小型で、構成枚数が少なく、高性能で、コマ収差、特にサジタルコマ収差、球面収差の少ない光学系、この光学系を有する撮像装置、及び、光学系の製造方法を提供する。
【解決手段】一眼レフカメラ1等に搭載される光学系OSは、光軸に沿って物体側から順に、正の屈折力を有する第1レンズ群Gaと、負の屈折力を有する第2レンズ群Gbと、第3レンズ群Gcと、正の屈折力を有する第4レンズ群Gdと、を有し、第1レンズ群Gaは、少なくとも1枚の正レンズ成分Laを有し、第2レンズ群Gbは、少なくとも1枚の負レンズ成分Lb2を有し、第3レンズ群Gcは、物体側に凹面を向けた負レンズLcnと正レンズLcpとの接合による接合レンズLcを有し、第4レンズ群Gdは、少なくとも正レンズLdp1と負レンズLdnと正レンズLdp2とが接合された接合正レンズLdを有する。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】露光時間の異なる撮像素子を用いて撮像された画像の動きを、より精度よく検出することができるようにする。
【解決手段】複数の露光時間を有する複数の画素を規則的に配置することにより構成された撮像素子により撮像された画像の被写体を構成する画素の値を近似する近似式を生成し、注目画素の値、並びに、注目画素と露光時間が異なる画素を含む周辺画素であって、注目画素とは時間的または空間的に異なる位置に存在する複数の周辺画素のそれぞれの値を取得し、注目画素および周辺画素のそれぞれの露光時間を取得し、注目画素と周辺画素との間の距離である画素間距離、取得された画素値、取得された露光時間に基づいて撮像画素像の被写体の注目画素における移動速度を算出し、移動速度に基づいて、被写体の単位時間当たりの動き量を特定する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より精度よく高速にグローバル動きベクトルを求めることができるようにする。
【解決手段】グローバル動きベクトル予測部は、過去の撮像画像のグローバル動きベクトルから、処理対象のフレームの撮像画像のグローバル動きベクトルの予測値を算出し、有効領域算出部は、その予測値に基づいて、撮像画像上の有効領域を定める。局所特徴量算出部は、撮像画像上の有効領域から局所特徴量を抽出し、積分射影部は、抽出された局所特徴量を所定方向の軸に射影することで、射影特徴ベクトルを算出する。グローバル動きベクトル算出部は、連続する2つのフレームの射影特徴ベクトルのマッチング処理を行うことにより、グローバル動きベクトルを算出する。本発明は、撮像装置に適用することができる。
(もっと読む)
焦点調節装置およびカメラ
【課題】焦点検出時の演算負荷を低減することが可能な焦点調節装置を提供する。
【解決手段】第1時刻と後の第2時刻とにおいて焦点調節状態を検出する焦点検出手段と、第1時刻において焦点検出手段により検出された焦点調節状態に基づき、複数のフォーカスエリアから合焦対象となる注目フォーカスエリアを選択する選択手段と、第1時刻において焦点検出手段により検出された注目フォーカスエリアの焦点調節状態に基づき、焦点調節状態を調節する焦点調節手段と、焦点検出手段により第1時刻に検出された複数の焦点調節状態と、焦点検出手段により第2時刻に検出された複数の焦点調節状態とを比較し構図変更が発生したか否かを判定する構図変更判定手段とを備え、焦点調節手段は、構図変更が発生しなかったと判定された場合に、第1時刻において選択された注目フォーカスエリアの第2時刻における焦点調節状態に基づき、焦点調節状態を調節する焦点調節装置。
(もっと読む)
画像処理装置および方法、学習装置および方法、プログラム、並びに記録媒体
【課題】露光時間の異なる撮像素子を用いて撮像された画像の動きを、簡単に、かつ精度よく検出することができるようにする。
【解決手段】複数の露光時間を有する複数の画素を規則的に配置して構成された撮像素子を用いて画像を撮像する撮像部によって撮像された画像の中の注目画素の予測値を、前記注目画素と露光時間が異なる複数の他の画素の値、および、前記他の画素のそれぞれに対応する予測係数に基づいて算出する算出部と、前記算出された前記注目画素の予測値と前記注目画素の値に基づいて、前記注目画素の単位時間当たりの動き量を特定する動き量特定部とを備える。
(もっと読む)
光学系、この光学系を有する撮像装置、及び、光学系の製造方法
【課題】小型で、構成枚数が少なく、高性能で、コマ収差、特にサジタルコマ収差、球面収差の少ない光学系、この光学系を有する撮像装置、及び、光学系の製造方法を提供する。
【解決手段】カメラ1等に搭載される光学系OSは、正の屈折力を有する第1レンズ群Gaと、負の屈折力を有する第2レンズ群Gbと、第3レンズ群Gcと、正の屈折力を有する第4レンズ群Gdと、を有し、第1レンズ群Gaは少なくとも1枚の正レンズ成分Lapを有し、第2レンズ群Gbは正レンズLbnpと負レンズLbnnとが接合され、物体側に凸面を向けた接合負レンズLbnを有し、第3レンズ群Gcは物体側に凹面を向けた負レンズLcnと正レンズLcpとの接合による接合レンズLcを有し、第4レンズ群Gdは物体側に凸面を向けた正レンズLdppと像側に凹面を向けた負レンズLdpnとが接合された接合正レンズLdp1と、正レンズ成分Ldp2と、を有する。
(もっと読む)
動き画像領域判定装置またはその方法
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より精度よく高速にグローバル動きベクトルを求めることができるようにする。
【解決手段】解像度変換部は、撮像画像を解像度の異なる複数の縮小画像に変換し、局所特徴量算出部は、各縮小画像から局所特徴量を算出する。積分射影部は、抽出された局所特徴量を所定方向の軸に射影することで射影特徴ベクトルを算出し、グローバル動きベクトル算出部は、連続する2つのフレームの射影特徴ベクトルのマッチング処理を行うことにより、撮像画像の解像度ごとにグローバル動きベクトルを算出する。また、信頼度算出部は、射影特徴ベクトルに基づいてグローバル動きベクトルの信頼度を算出する。グローバル動きベクトル選択部は、信頼度に基づいてグローバル動きベクトルを選択する。本発明は、撮像装置に適用することができる。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム、並びに、画像処理による放射線量推定方法
【課題】撮影画像内の点や短い線や被写体のコーナーなどの凸部分を特徴点として安定・的確に抽出することができるようにする。
【解決手段】元画像内の着目点と当該着目点から角度θ方向に距離dだけ離れた点との2画素の画素値の対の出現度数を用いて方向別の濃度共起ヒストグラムを作成するステップ(S2)と、当該方向別の濃度共起ヒストグラムの要素の出現確率を算出するステップ(S3)と、当該方向別ヒストグラム要素出現確率を用いて方向別自己エントロピの計算を行うステップ(S4)と、元画像の画素値を対応する方向別自己エントロピの値に置換することによって方向別自己エントロピ画像を作成するステップ(S5)と、当該方向別自己エントロピ画像を用いて特徴画像として総乗画像と総和画像とのうちの少なくとも一方を作成するステップ(S6,S7)とを有するようにした。
(もっと読む)
焦点に基づく動的シーンの深度再構成のための装置および方法
【課題】動的シーンが、レンズおよびセンサを備えるカメラを用いて、焦点深度を変更しながら動的シーンの焦点スタックを最初に取得することによって、深度および拡張被写界深度ビデオとして再構成される。
【解決手段】焦点スタックのフレーム間のオプティカルフローが求められ、そのオプティカルフローにしたがってフレームをワープして、フレームを位置合わせし、仮想静的焦点スタックを生成する。最終的に、デプス・フロム・デフォーカスを用いて、仮想静的焦点スタックごとの深度マップおよびテクスチャマップが生成され、そのテクスチャマップはEDOF画像に対応する。
(もっと読む)
焦点調整装置、焦点調整方法およびプログラム
【課題】輝度信号に含まれるノイズ成分の影響を強く受ける状況であっても、信頼性が高い合焦精度を得ることを目的とする。
【解決手段】被写体像を光電変換することによって撮像部により生成される撮像信号に基づいてフォーカスレンズの位置を制御する焦点調整装置が、被写体の撮影時の露出条件を検出する露出条件検出手段と、撮像信号の高周波成分に基づく焦点評価値を算出する焦点評価値算出手段と、露出条件検出手段により検出された露出条件に基づいて、焦点評価値算出手段で取得する焦点評価値のデータ数を設定する設定手段と、焦点評価値算出手段において設定手段で設定されたデータ数算出された焦点評価値に基づいて、フォーカスレンズを駆動するフォーカスレンズ制御手段と、を有する。
(もっと読む)
141 - 160 / 3,259
[ Back to top ]