
Fターム[5C122HB10]の内容
Fターム[5C122HB10]に分類される特許
181 - 200 / 3,259
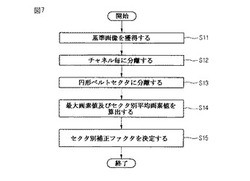
レンズシェーディング補正ファクタの算出方法及びそれを用いたレンズシェーディング補正方法及び装置
【課題】レンズシェーディング補正ファクタの算出方法及びそれを用いたレンズシェーディング補正方法及び装置。
【解決手段】本発明は撮像素子の特性に起因するレンズシェーディングを補正するための補正ファクタを算出する方法を提示するが、従来の方法よりメモリ使用量が顕著に減少した方法を提示する。本発明によれば、基準画像を撮影し、撮影された基準画像に対してレンズシェーディングパターンの特性を利用して補正ファクタを算出するか、指数スプライン関数を用いて画素値分布を近似化して近似化された画素値分布を用いて補正ファクタを算出する。また、本発明は算出された補正ファクタを用いてレンズシェーディングを補正する方法及び装置を提供する。
(もっと読む)
フォーカス調整装置、カメラモジュール製造装置、フォーカス調整方法、カメラモジュールの製造方法、フォーカス調整プログラムおよび記録媒体

【課題】生産効率が高く、かつ、コンパクトに実現可能なフォーカス調整装置を提供する。
【解決手段】フォーカス調整装置は、距離yを検出する検出部と、下記の式(1)で求められる距離dzを演算する演算部と、フォーカスレンズと像面との相対距離を距離dzだけ短縮させるフォーカス調整部とを備える。 (もっと読む)
(もっと読む)
画像入力装置、会議装置、画像処理制御プログラム、記録媒体
【課題】カメラの高さの変化を含んだ任意の位置での画像処理が可能な画像入力装置を提供すること。
【解決手段】被写体を撮影するカメラ本体77と、被設置面に設置される筐体2と、カメラ本体77をチルト可能に支持させると共に、筐体2に上下方向へ揺動可能に支持されたアーム部71と、第1及び第2の加速度センサS1、S2を備えアーム部71とカメラ本体77の傾きを検出させる傾き検出部Sと、傾き検出部Sが検出した傾きと当該装置の寸法情報とに基づいて、被設置面からカメラ本体77までの高さ高さ距離情報Lを算出し、その算出した高さ距離と傾き検出部Sが検出したカメラ本体77の傾きとからカメラ本体77が撮影する被写体の種類を特定し、その特定した種類の被写体に適した画像処理を実行する制御部を備えて画像入力装置を構成する。
(もっと読む)
カメラ方向調整装置及びカメラ方向調整方法
【課題】デジタルカメラの光軸方向の調整を簡便に精度良く行うことを可能とする。
【解決手段】カメラ方向調整装置は、光軸方向の調整対象のカメラが逐次撮像した撮像画像を取得する画像取得手段と、光軸方向の目標とする目標方向に対して正対する位置に配置された表示画面及び調整の基準とする基準マークとを有する表示手段と、取得された撮像画像を表示画面に表示出力させる制御手段とを備える。
(もっと読む)
映像合成装置、映像合成方法、および映像合成プログラム
【課題】複雑なキャリブレーションや特殊なデバイスを必要とせず、光源が直接的に映っていない映像から光源方向を推定して映像を合成する。
【解決手段】光源環境の異なる被写体が撮像された複数の映像から光学的整合性のある映像を合成する映像合成装置が、光源位置が含まれる光源情報が予め対応付けられた被写体を含む既知映像を記憶し、入力された入力映像に含まれる複数の被写体領域を選択し、選択した被写体領域に含まれる被写体が、球面であるか否かを判定し、被写体が球面であると判定した複数の被写体領域毎に、被写体領域における被写体に対する光源位置を算出し、既知映像を、算出した光源位置に基づいて補正し、光源位置を補正した既知映像を、入力映像に合成する。
(もっと読む)
撮像装置、プログラムおよび記憶媒体
【課題】音信号のノイズ低減処理を行う撮像装置、プログラム、記憶媒体を提供する。
【解決手段】推定ノイズ(NK)および演算結果を記憶する記憶部(18)と、 音声入力部(21)で検出された音信号(SL)と前記推定ノイズ(NK)との演算を行う演算部(11)とを含み、前記演算部(11)は、前記推定ノイズ(NK)と前記音信号(SL)との類似度(Ip)に基づき推定ノイズ範囲を決定するとともに、前記推定ノイズ範囲と前記音信号(SL)との関係に基づき前記推定ノイズ(NK)を更新する撮影装置。
(もっと読む)
画像変形方法及び画像変形装置
【課題】画像の変形処理において、入力画像バッファのサイズを小さくする。
【解決手段】画像変形方法は、変形前画像の走査線方向に第1ピッチで、且つ垂直走査方向に第2ピッチで配置された領域隅点によって囲まれた複数の領域を設定する工程と、複数の領域の各々に対して0個以上のサンプリングポイントを設定する工程と、サンプリングポイントの個数と、各サンプリングポイントを特定する識別子と、変形後画像において各サンプリングポイントに対応する画素とを対応づける変形データを生成する工程と、変形前画像の画像データを読み込んで入力バッファに格納する工程と、変形データに基づいて画像データを変更することにより変形後画像を生成する工程とを備える。
(もっと読む)
撮像装置及び画像生成方法
【課題】S/N劣化を抑制した混色除去を高解像化画像に対して行うことが可能な撮像装置及び画像生成方法等を提供すること。
【解決手段】撮像装置100は、画素アレイ部111と読み出し制御部112と推定演算部200と混色除去処理部210を含む。画素アレイ部111のカラーフィルターの基本ブロックは、Mx×My画素である。読み出し制御部112は、Mx×My画素とは異なるNx×Ny画素の加算単位を設定する。読み出し制御部112は、重畳しながらシフトされた加算単位を設定して重み付け加算を行い、複数の低解像画像を取得する。推定演算部200は、その低解像画像に基づいて高解像画像を推定する。混色除去処理部210は、その複数の低解像画像から高解像画像の画素値を推定することによる混色、及び重み付け加算により複数色の画素値が加算されたことによる混色を除去する処理を行う。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】追尾条件に応じて、無駄な演算処理を省いてCPUの負担を低減しながら、最適な駆動周期で撮像素子を駆動して天体を点像として撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮影装置に内蔵する所定の追尾手段を駆動させながら追尾撮影する天体自動追尾撮影方法であって、前記撮影装置の撮像素子の撮像面上に形成される天体像の、日周運動による所定時間あたりの撮像面上での移動距離を算出するステップ;及び算出した前記天体像の所定時間あたりの撮像面上での移動距離と、前記撮像素子の画素ピッチとに基づいて、前記追尾手段の駆動周期を設定するステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
撮像装置及びその制御方法
【課題】 測光値の予測を行う場合にも、被写体の輝度を反映させた測光値を用いて露出演算を行うことができるようにする。
【解決手段】 測光手段の出力値が所定値となるようにリセットを行ってから第1の時間が経過したときの測光手段の出力に基づく第1の測光値と、リセットを行ってから第1の時間よりも長い第2の時間が経過したときの測光手段の出力に基づく第2の測光値とに基づいて予測測光値を算出し、リセットを行ってから第2の時間よりも長い第3の時間が経過したときに測光手段の出力に基づく第3の測光値を取得した場合、第3の測光値に基づいて露出演算に予測測光値を用いるか否かを決定する。
(もっと読む)
撮像装置
【課題】複数色の画素値を重み付け加算して得られた撮像画像のホワイトバランスを調整可能な撮像装置等を提供すること。
【解決手段】撮像装置は、読み出し制御部131と、混色除去処理部120と、色温度検出部121と、色温度調整部122と、推定演算部を含む。読み出し制御部131は、重畳しながらシフトされた加算単位を設定することにより、複数色の各色と重み付け係数の対応が異なる複数の低解像画像を取得する。混色除去処理部120は、その複数の低解像画像に対して、重み付け加算による混色を除去する処理を行い、各色に対応する画素値を求める。色温度検出部は、混色が除去された低解像画像に基づいて色温度を検出する。色温度調整部122は、検出された色温度に基づいて、低解像画像の色温度を調整する。推定演算部は、色温度補正された低解像画像に基づいて高解像画像を推定する。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】非力なCPUでも、撮像エリアがその可動域を超えない範囲内で、なるべく長い撮影時間をリアルタイムかつ高精度に設定する。
【解決手段】撮像面の撮像エリア上での天体像の移動情報に基づいて、撮像エリアの所定時間あたりの光軸直交方向の理論平行移動量及び光軸と平行な軸回りの理論回転角度量を算出し、撮像エリアの可動域における、撮像エリアの基準姿勢位置からの光軸直交方向の実平行移動可能量及び光軸と平行な軸回りの実回転可能角度量を対応付けて保持する移動可能量テーブルを取得し、算出した撮像エリアの所定時間あたりの理論平行移動量及び理論回転角度量と、取得した移動可能量テーブルが保持する実平行移動可能量及び実回転可能角度量とを比較して、撮像エリアを該撮像エリアの可動域の範囲内で移動させながら天体自動追尾撮影を完了させるための撮影時間を設定する天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】高価で大きく重く複雑な調整が必要な赤道儀を使用せず、高精度に制御が必要なアクチュエーターも用いず、無駄な演算処理を省いてCPUの負担を低減し、天体を見かけ上静止した状態で明るく撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮像素子の撮像領域の一部を電子的にトリミングしたトリミング領域を移動させながら撮影する天体自動追尾撮影方法であって、前記撮像領域上での天体像の移動情報を取得するステップ;取得した前記天体像の移動情報に基づき、前記トリミング領域の移動データを設定するステップ;及び設定した前記トリミング領域の移動データに基づいて前記トリミング領域を移動させながら、各移動後のトリミング領域上で撮影を行うステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
ブレ補正装置、ブレ補正方法及び帳票
【課題】PSFを用いて画像のブレを補正する場合に、比較的少ない演算量で、かつ、簡易な構成で、かつ、容易な操作で、高精度のブレ補正を行うことができるブレ補正装置を提供すること。
【解決手段】ブレ補正装置100は、撮影画像からレイアウトマーカを検出するレイアウトマーカ検出部102と、PSF推定用マーカの位置を求める推定用マーカ位置算出部104と、PSF推定用マーカの大きさを求める推定用マーカサイズ算出部105と、基準となるPSF推定用マーカ画像を生成する推定用マーカ基準画像生成部106と、基準となる推定用マーカ画像とそれに対応する撮影画像中の推定用マーカ画像とを用いてPSFを推定するPSF算出部108と、推定されたPSFを用いて撮影画像のブレを補正するブレ補正部109と、を有する。
(もっと読む)
撮像装置及びその制御方法、並びにプログラム
【課題】撮影者が複数の撮影パラメータを容易に調整可能な撮像装置及びその制御方法、並びにプログラムを提供する。
【解決手段】撮像装置は、被写体を光学系を介して撮像する撮像手段により撮像することによって得られた被写体を示す画像信号に対して信号処理を行う撮像装置であって、被写体に応じて予め定められており、信号処理で用いられる複数の撮影パラメータに対して主成分分析することにより、複数の主成分得点、及び複数の固有ベクトルを算出する算出手段と、算出手段により算出された複数の主成分得点のうちのいくつかの主成分得点に対応する軸で構成される直交座標空間において、撮影者により指定された座標値、及び固有ベクトルから、信号処理で用いられる複数の撮影パラメータを生成する生成手段とを備える。
(もっと読む)
追尾装置、追尾方法及びプログラム
【課題】移動物体の速度に関係なく、長時間、より正確に移動体の追尾を行うことを目的とする。
【解決手段】特徴量に対応したパラメータに基づいて撮像手段で撮像された画像中の動体を検出する物体検出手段と、カメラの姿勢を制御する姿勢制御手段と、動体の速度に応じて物体検出手段のパラメータを動的に変更する制御手段と、を有することによって課題を解決する。
(もっと読む)
撮像装置、撮像方法および画像処理装置
【課題】高フレームレートの撮像画像データの画質改善を図る。
【解決手段】第1のイメージセンサから画素数の少ない高フレームレートの画像データを得る。第2のイメージセンサから画素数が多く低フレームレートの画像データを得る。高フレームレートの画像データに対して、所定画像領域毎に、低フレームレートの画像データの類似領域の画像データを、類似度に応じて加重加算して、高フレームレートの出力画像データを得る。例えば、高フレームレートの画像データが間引き読み出し等による折り返しが含まれた画像データである場合、偽色、ジャギーなどを低減できる。また、例えば、高フレームレートの画像データが画素数の少ないイメージセンサから出力された画像データである場合、解像度を向上できる。
(もっと読む)
画像処理装置およびその方法
【課題】 第一の解像度を有する複数の画像データから、第一の解像度よりも高い第二の解像度を有する画像データを合成する場合に適切な処理が可能な合成パラメータの設定を可能にする。
【解決手段】 撮像装置100は、撮像部101-125から、複数の視点から撮像して得られた、第一の解像度を有する複数の第一の画像データ、および、撮像における撮像情報を入力する。CPU201は、撮像情報に基づき、第一の画像データから第一の解像度よりも高い第二の解像度を有する第二の画像データを合成するための合成パラメータとして複数の候補値を設定する。CPU201は、複数の候補値から選択された候補値を合成パラメータとして、複数の第一の画像データから第二の画像データを合成する。
(もっと読む)
181 - 200 / 3,259
[ Back to top ]