
Fターム[5D057AA16]の内容
テープカセットのオートチェンジャー (871) | 全体形式 (188) | 棚型、平面型 (178)
Fターム[5D057AA16]の下位に属するFターム
移動するもの (4)
複数の棚の組合せによるもの (52)
垂直方向ユニット (37)
水平方向ユニット (21)
Fターム[5D057AA16]に分類される特許
1 - 20 / 64
磁気テープライブラリ装置
情報記録再生装置および情報記録再生方法
【課題】消費電力の増大を低減するとともに、記録される情報の信頼性を高める情報記録再生装置および情報記録再生方法を提供する。
【解決手段】任意の情報記録媒体の品質劣化の傾向から、他の情報記録媒体の品質を算出できる情報記録媒体監視部を有し、前記情報記録媒体監視部が予め定めた品質基準値と比較し、品質基準値を満たさない情報記録媒体に対しては品質規格外媒体として所定の処置を施すことを特徴とする情報記録再生装置。
(もっと読む)
テープライブラリ装置塵埃クリーニングシステム制御方式

【課題】従来、テープスロットに蓄積した塵埃を除去しテープ媒体への接触を防止しなければならない。
【解決手段】本発明では、専用空きテープ収納棚を設定している場合、テープ格納済みテープ収納棚から、磁気テープ媒体を空きテープ収納棚へ搬送し、一時的に格納する。その後空きテープ状態となったテープ収納棚に対し塵埃クリーニングテープを用いて、塵埃クリーニングを行う。これらテープ収納棚に空きが有る場合の一連のテープライブラリ装置制御方式。
(もっと読む)
ストレージ装置及びストレージ装置のラッチ状態検出方法
【課題】カセットが収納スペース内の適正収納位置にあるか否かの検出を効率的に行ない、アクセッサによるカセット収納作業を効率化するストレージ装置及びストレージ装置のラッチ状態検出方法を提供する。
【解決手段】複数のカセットCを所定の案内面1Aに案内させながら収納スペース1の開口部2から底部1Bへ向かって直列に収容するストレージ部3を開口部2の面方向に複数並べたマガジン4(収納部)と、このマガジン4と対向して設けられて前記開口部2の面と平行に移動して、カセットCを操作するアクセッサAとを有するストレージ装置であって、カセットCを底部1B側から開口部2側へ付勢する押出手段と、開口部2と交差する方向に移動可能に設けられ、開口部2と重なる方向へ付勢されたラッチレバー11と、アクセッサAに設けられ、ラッチレバー11の位置を検出する撮像装置20(検出手段)と、を有することを特徴とする。
(もっと読む)
データライブラリ装置、データアーカイブシステム、サーバ
【課題】データライブラリ装置において、各部位にかかる負荷の情報を記録する。
【解決手段】
複数枚の記録媒体を管理し、前記記録媒体にデータを記録再生するデータライブラリ装置において、情報を記憶する記憶部と、装置を制御する制御部を備え、サーバからのデータ記録処理あるいはデータ再生処理要求を受けると、前記制御部は、記録媒体運搬装置にかかる負荷情報と、記録再生装置にかかる負荷情報と、記録媒体にかかる負荷情報と、を収集し、前記記憶部に記憶する。
(もっと読む)
ライブラリ装置
【課題】アクセッサ機構の移動経路内の塵埃を自動的に除去可能なライブラリ装置を提供する。
【解決手段】ライブラリ装置は、記録媒体を収納するセルを複数備えたマガジンと、記録媒体に情報の記録および再生を行うドライブ装置と、ドライブ装置およびセルに対して記録媒体の出し入れを行うピッカ手段と、ピッカ手段を搭載しピッカ手段が取り出した記録媒体をドライブ装置と各セルとの間で搬送するアクセッサ手段と、を有し、ピッカ手段が、記録媒体と連結した状態でドライブ装置またはセルに対して離れるまたは近づく方向に移動して記録媒体の出し入れを行い、ピッカ手段の移動に連動して、ピッカ手段の底部に対向する対向領域の移動経路上の塵埃を除去する除去手段を有する。
(もっと読む)
ライブラリ装置、モデルタイプ識別方法およびプログラム
【課題】手作業での設定ミスにより自装置のモデルタイプを誤認識することを防止可能なライブラリ装置、モデルタイプ識別方法およびプログラムを提供する。
【解決手段】コンピュータが情報を読み書き可能な媒体を複数収容可能である1以上のマガジンを実装し前記マガジンの実装形態に応じて自装置のモデルタイプを設定するライブラリ装置は、自装置に実装されているすべてのマガジンから、マガジンに付された所定マークを検出する検出手段と、検出手段により検出される前記所定マークの位置に基づいて、モデルタイプを識別する識別手段と、を含む。
(もっと読む)
アクセッサ移動装置およびアクセッサ移動方法
【課題】アクセッサの位置決めにおいてバックラッシの影響を低減し、精密な位置制御を可能にする。
【解決手段】本発明は、記憶媒体を収容したカートリッジ5を筐体15内の直線上の任意の場所から別の場所へ運ぶためのアクセッサ6と、ギアの回転によりアクセッサ6を直線上に沿って往復移動させるギア駆動機構とを備えたアクセッサ移動装置に係る。当該装置は、前記ギア駆動機構のバックラッシが除去されるように、アクセッサ6の往動方向もしくは復動方向Pにアクセッサ6を常時付勢する定荷重ばね16を備えている。
(もっと読む)
アライメント調整装置、ライブラリ装置及びアライメント調整方法
【課題】 カートリッジ等の被搬送物を搬送するロボットのアライメント調整を自動化し、安定したハンドリングを可能にすることにある。
【解決手段】 アライメント調整装置、ライブラリ装置又はアライメント調整方法であって、収納棚(10)に被搬送物(カートリッジ4)を搬入し、又は収納棚から被搬送物を搬出する少なくとも2つのロボット(6、8)を備え、ロボットの1つでセルアクセスの異常が発生した場合に基準フラグ(18A、18B、18C)の測定前に、アクセスの異常時のロボットから別のロボットに切り替えてアクセスを行い、複数のロボットにセルアクセスの異常が発生した場合、対象セルフラグ(19)を測定する。また、複数のロボットにエラーが発生する場合、セル側の経年変化を判断し、対象セルフラグの再測定を行う。
(もっと読む)
リムーバブルメディアに関する処理を行う装置及び方法
【課題】複数のドライブ又は複数のメディアが保持するエラー情報に基づくエラーに関する判断を、ドライブで行えるようにする。
【解決手段】テープドライブのコントローラ30において、エラー検出部31が検出したエラーをエラー復旧部32が復旧できなかった場合に、エラーレポート生成部33が、エラーレポートを生成し、エラー情報取得部34が、このテープドライブ及びこのテープドライブに装填中のカートリッジのエラー情報を取得し、エラー情報交換部35が、他のテープドライブ及び他のテープドライブに装填中のカートリッジのエラー情報を取得し、エラー原因判定部37が、これらのエラー情報に基づいてエラー原因がテープドライブかカートリッジかを判定し、エラーレポート更新部38が、エラーレポートをこの判定の結果で更新し、エラーレポート出力部39が、更新後のエラーレポートをホストへ出力する。
(もっと読む)
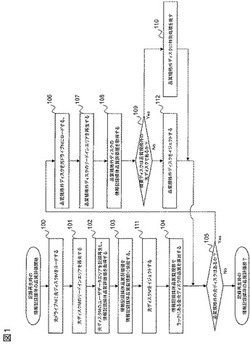
記録媒体チェンジャー及びコンテンツ情報の読み出し方法
【課題】 所望の記録媒体に、より高速にアクセスすることができる記録媒体チェンジャーを提供する。
【解決手段】 記録媒体チェンジャー100を、収納部1と、駆動部3と、搬送部2と、コンテンツ情報取得部24とを備える構成とする。そして、コンテンツ情報取得部24は、駆動部3以外の所定の位置に配置された記録媒体200から、記録媒体200に記録されている情報の内容に関するコンテンツ情報を直接取得する。
(もっと読む)
ライブラリ装置、マガジン挿入検出方法及びプログラム
【課題】マガジンの挿入を検出するためのセンサを用いることなく、全てのマガジン挿入位置についてマガジンが挿入されているか否かを検出することができるライブラリ装置、マガジン挿入検出方法及びプログラムを提供することを目的とする。
【解決手段】コンピュータが読み書き可能な媒体を複数収容でき、当該媒体を収容するセル毎に所定のマークが付されたマガジンを複数挿入可能なライブラリ装置であって、媒体の移送を行うアクセッサ手段に設けられ、マガジンの挿入位置の全てに対してマークの読み取りを行うマーク読取手段と、マークが読み取れた場合は当該挿入位置にマガジンが挿入されていると判断し、マークが読み取れなかった場合は当該挿入位置にマガジンが挿入されていないと判断する制御手段と、を有することを特徴とする。
(もっと読む)
操作器具、ケース、磁気テープライブラリ装置および収納物の落下防止方法
【課題】 ケースからの収納物の落下を防止する。
【解決手段】 操作器具1は、凸部位2と、ストッパ操作部位3とを有する。ストッパ操作部位3は、ケース5の内部8と外部9をつなぐ開口部位10が形成されているケース壁6の開口部位10に対して進退方向Dに移動可能なストッパ7を、開口部位10から後退する方向に移動する。凸部位2は、ストッパ7を開口部位10から後退する方向に移動するストッパ操作部位3の動きに連動して、開口部位10に進入する方向に移動する。
(もっと読む)
ライブラリ装置
【課題】複数に分割されたマガジンを有する構成のライブラリ装置について、簡単な仕組みによりインベントリ処理での待ち時間を短縮する。
【解決手段】検出対象のマガジンが装置本体における所定位置まで引き出されたか否かを位置検出手段により検出する。検出されていない場合、その検出されていないことにより装置本体から抜き出されていないと判別されるマガジンスロット列へのインベントリ処理をスキップし、インベントリ処理による待ち時間を短縮する。
(もっと読む)
ギヤ駆動機構およびライブラリ装置
【課題】ギヤの回転駆動を用いた駆動機構であっても、バックラッシの影響を効果的に低減し、精密な位置制御を可能とする。
【解決手段】ギヤの回転により移動対象を移動させるに当たって、センサフラグにより位置制御のための原点を位置決めしてから位置制御する。この位置決めの際、ギヤ駆動におけるバックラッシが除去されるように、移動対象の移動方向にバイアス手段でバイアスを発生させるようにする。このことにより、原点の位置決めの際にバックラッシを実質“ゼロ”にし、原点リセット位置を安定化させる。
(もっと読む)
自動化されたデータ・ストレージ・ライブラリ、ロボット通信システム、コンピュータ・プログラム、およびデータ・ストレージ・システム(自動化されたデータ・ストレージ・ライブラリのためのバースト通信)
【課題】自動化されたデータ・ストレージ・ライブラリ、ロボット通信システム、およびコンピュータ・プログラムを提供する。
【解決手段】ストレージ棚と(複数の)データ・ストレージ・ドライブとバス・バーとを有する自動化されたデータ・ストレージ・ライブラリとロボット・アクセス機構を移動させるための駆動システムとアクセス機構通信インターフェースとバス・バーを連結および開放するように構成されたバス・バー・リレーとを有するロボット・アクセス機構と、ロボット・アクセス機構を移動させるように駆動システムを動作させ、ロボット・アクセス機構が静止している場合には、バス・バーを連結するようにバス・バー・リレーを動作させ、バス・バー・リレーがバス・バーを連結している場合には、バス・バー継電器およびバス・バーを介して通信機能を提供するように構成されたロボット制御器とを含む。
(もっと読む)
ディスク・ライブラリ装置
【課題】ディスク・ライブラリ装置においてマガジンからパレットを正確に取り出す。
【解決手段】本発明の一実施形態に係る光ディスク・ライブラリ装置は、複数の光ディスクを収容するマガジン12を有する。マガジンは複数のパレット31、32を収容し、複数のパレットは異なる係合爪形状を有する異なる種類のパレットを含む。マガジン内において、異なる種類のパレットが隣り合うように配列される。ピッカは、一つもしくは複数のアームを使用して、選択されたパレットを取り出す。一つもしくは複数のアームのそれぞれは、選択されたパレットの取り出しにおいて、その選択されたパレットの係合爪と係合しかつ選択されたパレットの隣のパレットの係合爪との係合位置から外れた位置にある。
(もっと読む)
ライブラリ装置およびインベントリ制御方法
【課題】ライブラリ装置の省電力運用を実現できるとともに、インベントリ処理時間の短縮化による電力消費の低減およびタイムアウトを回避できるライブラリ装置を提供する。
【解決手段】ライブラリ装置は、撮影カメラ7により撮影されたセル格納体内のカートリッジの映像を第一の画像データとし、省電力モードから復電した後に、撮影カメラ7により撮影されたカートリッジの映像を第二の画像データとして処理する画像処理部22と、第一の画像データの特徴画像と、第二の画像データの特徴画像との画像差を判別する画像判別部23と、画像判別部23により判別された第一の画像データと第二の画像データとの画像差がある領域に格納された所定のカートリッジを対象とするインベントリ処理を行なうインベントリ処理部24とを備える。
(もっと読む)
ライブラリ装置
【課題】ライブラリ装置の背面側にマガジンを拡張するスペースを確保できるライブラリ装置を提供する。
【解決手段】ライブラリ装置に電気を供給する電源手段3と、コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段6と、媒体に対して読み出し及び書き込みを行う媒体読み書き手段1と、媒体収容手段と媒体読み書き手段の間で媒体の移送を行う媒体移送手段5と、ライブラリ装置の動作を制御する制御手段2と、電源手段及び制御手段のそれぞれを押し込むことで電気的に接続でき、引き出すことでその接続を解除できる第1の接続手段4,12と、を有し、ライブラリ装置の側面のいずれかに沿って、電源手段、第1の接続手段及び制御手段が配置され、第1の接続手段は、電源手段と制御手段の間に1つ配置され、電源手段及び制御手段に接続される。
(もっと読む)
ライブラリ装置、制御方法及びプログラム
【課題】ステッピングモータのパルス数と、エンコーダカウント数と、の関係が変わってしまっても、媒体移送手段の移動距離をエンコーダセンサでカウントしたエンコーダカウント数で確認することができるライブラリ装置を提供する。
【解決手段】 制御手段(2)は、媒体移送手段(5)の移動距離に応じたパルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する。そして、媒体移送手段(5)の移動距離を確認する場合に、上記決定した確認係数及び媒体移送手段(5)の移動距離に応じたパルス数に基づいて想定される想定エンコーダカウント数と、媒体移送手段(5)の移動距離に応じたパルス数だけステッピングモータを駆動した場合にエンコーダセンサでカウントされる実際のエンコーダカウント数と、を比較する。
(もっと読む)
1 - 20 / 64
[ Back to top ]