
Fターム[5D096KK12]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 発明、考案の目的 (335) | 外部振動対策 (53)
Fターム[5D096KK12]に分類される特許
1 - 20 / 53
磁気ディスク装置およびヘッドの位置制御方法
【課題】フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成すること。
【解決手段】 磁気ディスク装置は、サーボ情報が記録される磁気ディスクと、磁気ディスクのサーボ情報を読み出すためのヘッドと、位置制御手段とを具備する。位置制御手段は、前記ヘッドの位置決め制御を行う際に、ヘッドにより読み出したサーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて位置決め制御における外乱となる所定周波数を推定する。
(もっと読む)
磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法

【課題】マイクロアクチュエータに適した外乱フィードフォワードを実現する。
【解決手段】磁気ディスク装置は検出器とサーボコントローラ22とを備える。検出器は、ディスクに所定間隔で記録されているサーボ同期マークがヘッドにより読み出される時間間隔を実タイムスタンプとして検出する。サーボコントローラのフィードフォワードコントローラ40は、差分検出器401と積分器403とを具備する。差分検出器は、実タイムスタンプの目標タイムスタンプからのずれを検出する。積分器は、検出されたずれを積分することによって、検出されたずれをマイクロアクチュエータ15の変位に変換する。フィードフォワードコントローラは、変換された変位に対応する操作量をフィードフォワード操作量として、マイクロアクチュエータのための制御ループに与える。
(もっと読む)
磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法
【課題】ディスクの第1の面がトラッキング面として使用される場合に、ディスクの第2の面の位置誤差も低減できるようにする。
【解決手段】磁気ディスク装置は、ディスクと、第1及び第2のマイクロアクチュエータと、サーボコントローラとを具備する。ディスクは、第1及び第2の面を備える。第1及び第2のマイクロアクチュエータ15−1,15−2は、それぞれ、第1及び第2の面に対応付けられた第1及び第2のヘッドを微動させる。サーボコントローラ20は、第1の面がトラックキング面として使用される特定モードにおいて、第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、第3の操作量を第1の操作量として第1のマイクロアクチュエータに、第3の操作量の特定周波数の成分の極性が反転された操作量を第2の操作量として第2のマイクロアクチュエータに、それぞれ与える。
(もっと読む)
デジタル制御装置の設計方法および設計装置
【課題】マルチレートデジタル制御装置を簡易な構成で設計する。
【解決手段】本発明にかかるデジタル制御装置の設計方法は、低レートで動作する低レート補償器と、前記低レート補償器の出力を高レートに変換するレート変換器と、高レートで動作する高レート補償器とを得る取得ステップと、前記高レート補償器をポリフェーズ分解し、該ポリフェーズ分解に対してノーブル恒等変換を用いて、第2の低レート補償器とレート変換器から構成される低レート構成に変換する変換ステップと、を含む。記変換ステップでは、前記高レート補償器のインパルス応答を求めてFIR形フィルタに変換した後に、ポリフェーズ分解を施す、ことも好ましい。
(もっと読む)
磁気ディスク装置及びヘッド位置制御方法
【課題】外部振動の印加時において、データの書き込み/読み出しを効率的に行うことが可能な磁気ディスク装置及びヘッド位置制御方法を提供する。
【解決手段】磁気ディスクと、磁気ディスク上を移動する磁気ヘッドと、磁気ディスク上での磁気ヘッドのヘッド位置と、磁気ディスク上での目標位置との差分に基づく位置誤差信号を出力する位置誤差信号出力手段322と、外部から印加される振動により生じた磁気ヘッドの振動パターンを検出する振動パターン検出手段324と、位置誤差信号と、振動パターンの振幅を表すオフセット信号とを加算する加算手段323と、加算手段の加算結果に基づいて、ヘッド位置を目標位置に移動させるヘッド位置制御手段321と、を備える。
(もっと読む)
音声出力装置及び音声出力方法
【課題】スピーカーによる振動の影響を軽減し特にハードディスクの振動軽減に適する音
声出力装置を提供する。
【解決手段】音声信号を出力するスピーカーと、前記音声信号の前記ハードディスク装置
への影響を周波数解析する解析手段とを備え、この解析手段は前記周波数解析の結果を、
前記ハードディスク装置が前記スピーカーの該音声信号の出力に先立ち前記影響を緩和す
るため働き始めるように、前記ハードディスク装置へ伝達することを特徴とする音声出力
装置。また、ハードディスク装置と音声信号を出力するスピーカーとを内蔵する音声出力
装置における音声出力方法であって、前記音声信号の前記ハードディスク装置への影響を
周波数解析し、この周波数解析の結果が、前記ハードディスク装置が前記スピーカーの該
音声信号の出力に先立ち前記影響を緩和するため働き始めるように、前記ハードディスク
装置へ伝達されることを特徴とする音声出力方法。
(もっと読む)
磁気ヘッド駆動装置およびそれを用いた磁気ディスク装置
【課題】
励起されるアームモードの数を一つにし、すべてのヘッドの励起されるアームモードの周波数応答を同位相にすることで、制御コントローラの位相ロスを減らし、制御系の安定を確保した高精度の位置決め精度を可能とする。
【解決手段】
マイクロアクチュエータ8とメインアクチュエータを搭載する磁気ヘッド4駆動装置において、両端アーム12のマイクロアクチュエータ8どうしは同方向に駆動し、中間アーム13のマイクロアクチュエータ8は前記両端アーム12のマイクロアクチュエータ8の駆動方向と反対方向に駆動する。
(もっと読む)
ディスク・ドライブ及びヘッド位置決め制御方法
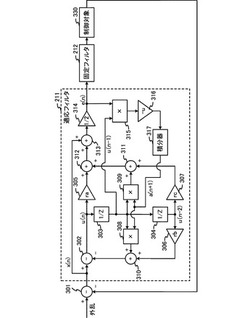
【課題】センサ出力を使用したヘッド移動機構のフィードフォワード制御において、制御システムの安定性と適応フィルタの収束性とを両立させる。
【解決手段】本形態のHDD1は、外部振動に応じて、ショック・センサ・フィードフォワード(SSFF)制御におけるフィルタの適応化を行う。適応化処理部APは、ショック・センサQの出力と位置誤差信号(PES)とを参照して、SSFFフィルタFのフィルタ係数を更新する。各フィルタ係数の更新において、その更新量はステップ・サイズ・パラメータによって決まる。適応化処理部は、このステップ・サイズ・パラメータを外部振動の大きさに従って変化させる。具体的には、ショック・センサ出力あるいはフィードフォワード出力を入力とする関数フィルタ出力の絶対値を使用する。
(もっと読む)
周回メモリ、及びディスク装置
【課題】メモリに記憶された情報と被補償信号に大きな差が生じた場合でも、不要な学習を回避でき、目標値の追従性能を損なわない周回メモリ、及び該周回メモリを備えるディスク装置を提供する。
【解決手段】入力される被補償信号の1周期分を記憶するメモリ15を0クリアするメモリリセット部19を備え、コントローラ20を介してディスク装置の状態に応じてメモリ15に記憶された信号情報のリセットを自在に行えるようにした。
(もっと読む)
フィードフォワードコントローラの補正方法、フィードフォワードコントローラ、ディスク記憶装置、及びディスク記憶装置のヘッド位置決め制御方法
【課題】機械的共振起因の外乱により生じる磁気ヘッドの位置決め誤差を効果的に低減する。
【解決手段】VCMコントローラ18が、機械的共振起因の外乱周波数の近傍において、フィードフォワード制御のゲイン特性及び位相特性が磁気ヘッド4の位置決め誤差を最小にするゲイン特性及び位相特性と略一致するように、フィードフォワード制御のゲイン特性及び位相特性を補正する。これにより、機械的共振起因の外乱により生じる磁気ヘッド4の位置決め誤差を効果的に低減することができる。
(もっと読む)
磁気ハードディスクドライブおよびその運転方法
【課題】 実行処理の高速化と記憶スペースの削減とを図りつつ、HDDにおけるRROの影響を最小限にする。
【解決手段】 トランスデューサ13からの位置信号75は、基準位置信号70と加算(引算)され、位置エラー信号(PES)80が得られる。PES80は、現サーボウェッジにおける現補正の実行のために制御部60に入力されると共に、フィードフォワードアルゴリズム部50にも入力される。フィードフォワードアルゴリズム部50は、RROのみに起因するトランスデューサ位置ずれ分を示すフィードフォワード値を反復合算により算出し、その結果を、その次のサーボウェッジ用のフィードフォワードRRO補正項として出力する。このフィードフォワードRRO補正項は、制御部60から出力される補償出力と加算され、その加算結果100が、制御信号としてプラント200のボイスコイルモータに供給される。
(もっと読む)
ディスク装置、ヘッド位置制御装置およびヘッド位置制御方法
【課題】外乱抑圧機能を持つオブザーバ制御による位置決め制御装置において、オブザーバの制御特性を損なうことなく、外乱抑圧機能を付加する。
【解決手段】アクチュエータのモデル(34〜44)と外乱のモデル(50)を分離し、外乱モデル(50)は、感度関数を整形する分母と分子の次数が同一のフィルタの前記分子を分母とした伝達関数で定義された外乱モデルから求めた推定ゲインを用いて、状態情報を生成し、前記状態情報から前記アクチュエータ(1)の外乱抑圧値を演算する。外乱モデルは、推定位置誤差に従い、抑圧すべき複数の外乱周波数に応じた複数の整形フィルタの分子を分母とした伝達関数で定義された複数のモデルの外乱の推定ゲインを用いて、状態情報を生成し、状態情報からアクチュエータの複数の外乱抑圧値を演算し、複数の外乱抑圧値を加算する。
(もっと読む)
情報記憶装置およびサーボ制御用フィルタ学習プログラム
【課題】ホスト側への応答が遅くならないように性能に対する影響を考慮しつつ、ヘッドの位置決め制御性能に対する振動の影響を抑制するために最適なサーボ制御用フィルタへの切替を実現することを課題とする。
【解決手段】ハードディスク装置は、記録再生エラー発生時に、位置誤差信号を各サーボ制御用フィルタを通して得た制御電流を用いて位置決め制御を行ったときの記録再生ヘッドの現在位置から振動量を算出する学習を、所定時間、複数のサーボ制御用フィルタのそれぞれに対して順番に行い、測定した振動量が最小のサーボ制御用フィルタに位置誤差信号を通して得た制御電流を用いて、記録再生ヘッドの位置決め制御を行う。
(もっと読む)
磁気ディスク装置のヘッド位置決め制御方法
【課題】位相特性を改善して制御系の安定性を維持する制御方法を提供すること。
【解決手段】フィードバック制御器31は、制御対象35である磁気ヘッドを磁気ディスク上の目標位置へ移動させるための制御操作量を決定する。また、共振抑圧フィルタ33によって、制御操作量の第1の周波数成分を抑制する。共振フィルタ34によって、制御操作量の第2の周波数成分を増大させる。抑制及び増大後の制御操作量に応じて、アクチュエータがヘッドを磁気ディスク上の目標位置へ移動させる。
(もっと読む)
ヘッドのサーボ制御システム及びヘッドのサーボ制御方法
【課題】複数のアダプティブ・ピーク・フィルタを有するヘッドのサーボ制御システムにおいて、他の処理への影響を小さくしつつ各アダプティブ・ピーク・フィルタの外部振動への適応化を効果的に行う。
【解決手段】本実施形態のHDDは、そのサーボ制御システム内に複数のアダプティブ・ピーク・フィルタ234a、234bを有している。HDDは、外乱によるヘッド振動のピーク周波数と振幅を推定し、ヘッド振動を抑圧するように複数のアダプティブ・ピーク・フィルタを適応化する。HDDは、複数のアダプティブ・ピーク・フィルタから一部を選択し、その一部のアダプティブ・ピーク・フィルタについて適応化のための処理を行う。これにより、サーボ・サンプリング間におけるラン・タイムを低減して他の処理への影響を避けると共に、各アダプティブ・ピーク・フィルタを外部振動に対して適切に適応させる。
(もっと読む)
マルチレートシステムコントローラの性能評価方法、マルチレートシステムコントローラ選択方法及びディスクドライブのコントローラの性能決定方法
【課題】新規且つ改善された、マルチレートシステムの周波数応答の特徴付けの提供。
【解決手段】閉ループ環境で動作するマルチレートシステムの機械的な構成要素の周波数応答が特徴付けられる。関心周波数とそのエイリアス周波数のそれぞれにおいて、マルチレートシステムへの入力として外乱が加えられ(ステップ503)、マルチレートシステムの応答の測定結果からなる行列方程式が解かれ、関心周波数及びそのエイリアス周波数のそれぞれにおける周波数応答が計算される(ステップ506)。結果として得られる周波数応答はシステム全体の伝達関数を合成するのに使用でき、更なる周波数応答の測定を必要とせずに、多数のコントローラ設計の相対的な性能のシミュレーション及び評価が可能となる。
(もっと読む)
磁気記憶装置及びヘッドの位置決め方法
【課題】ディスクフラッタのみの周波数成分を取得し、取得されたディスクフラッタの周波数成分に基づいて、精度良くヘッドの位置決め制御を実行する。
【解決手段】磁気記憶装置が備えるセンサ100が、ディスクフラッタとアーム曲げ振動とを含む第1の信号を検出し、センサ101が、アーム曲げ振動のみを含む第2の信号を検出する。磁気記憶装置が、上記検出された第1の信号と第2の信号とに基づいてディスクフラッタの周波数成分を取得し、取得されたディスクフラッタの周波数成分に基づいて、ヘッドの位置決め制御を実行する。
(もっと読む)
外乱抑制装置、外乱抑制装置制御方法及び外乱抑制型制御装置
【課題】外乱オブザーバを構成するQフィルタにおける演算処理において固定小数点数の小数部分を切り捨てる際に生じる誤差の影響を低減するのに好適な外乱抑制装置、外乱抑制装置制御方法及び外乱抑制型制御装置を提供する。
【解決手段】外乱抑制型制御装置100を、制御指令信号τを生成する制御器10と、該τと外乱オブザーバ信号τd’とを加算する加算器12と、制御対象14と、外乱オブザーバ信号τd’を生成する外乱オブザーバ16とを含んだ構成とし、外乱オブザーバ16を、逆システム20と、減算部22と、ローパスフィルタの機能を有するQフィルタ部24とを含んだ構成とし、Qフィルタ部24のフィルタ処理において、該処理後の固定小数点数のデータにおける小数部分を切り捨てるときに、小数部分を整数部分に丸め込んでから切り捨てるようにした。
(もっと読む)
ディスク・ドライブ装置及びそのサーボ制御方法
【課題】振動センサを有するディスク・ドライブ装置において、検出した振動に応じた適切なサーボ制御を行う。
【解決手段】本発明一実施形態において、HDDは、ヘッド・ポジショニングの振動補正を行う補正サーボ・モードと、振動補正を行わない通常サーボ・モードとを切り換える。HDDは、いずれかのサーボ・モードにおいてサーボ・ポジショニングを行い、測定した位置誤差信号からそのサーボ・モードにおけるサーボ・ポジショニングの精度を決定する。HDDは、他方のサーボ・モードのサーボ・ポジショニング精度を表すデータをテーブルから取得する。HDDは2つのサーボ・モードの精度を比較し、精度がより高いサーボ・モードを選択する。テーブルは、各サーボ・モードにおけるサーボ・ポジショニング精度の過去の測定結果を格納している。
(もっと読む)
磁気ディスク装置における磁気ヘッドの位置決め制御のためのフィードフォワード制御回路の設計方法、同設計方法により設計されたフィードフォワード制御回路を有する磁気ディスク装置及び同設計方法により設計されたフィードフォワード制御回路
【課題】ディスクフラッタの影響を効果的に低減可能な磁気ディスク装置における磁気ヘッドの位置決め制御が可能な構成を提供することを目的とする。
【解決手段】磁気ディスクを回転させた状態で当該磁気ディスクの振動を測定し、振動のスペクトラムから磁気ディスクフラッタによる振動の周波数であるフラッタ周波数を求め、フラッタ周波数の各々に対しゲインのピークを有する、フラッタ周波数毎のフィルタを設計し、フラッタ周波数毎のフィルタを合成することにより前記磁気ヘッドの位置決め制御のためのフィードフォワード制御回路を得る構成とした。
(もっと読む)
1 - 20 / 53
[ Back to top ]