
Fターム[5F031GA41]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670)
Fターム[5F031GA41]の下位に属するFターム
駆動機構 (1,726)
動作 (3,504)
複数のアームを有するもの (389)
Fターム[5F031GA41]に分類される特許
41 - 51 / 51
半導体装置の製造方法

【課題】 基板と基板支持具の擦れによるダスト発生を抑えることができる半導体装置の製造方法を提供する。
【解決手段】 基板54を載置した基板支持具30を反応炉40内に挿入後、反応炉40内を真空排気する前に、基板温度および基板支持具30の温度を安定させるステップを導入することにより、反応炉40内の真空排気時における基板54と基板支持具30の擦れによるダスト発生を抑制する。
(もっと読む)
搬送ロボットが装置された搬送室及びそのメンテナンス方法。

【課題】本発明の目的は、メンテナンス等のために搬送ロボットを取付及び取外しすることが容易な搬送室を提供することにある。また、搬送室から搬送ロボットを容易に取外す方法及び搬送室に搬送ロボットを容易に取付ける方法を提供することにある。
【解決手段】搬送ロボット1が装置された気圧調節が可能な搬送室10を、支持体としてのプロセス室2およびワーク室を介して床面8上に支持するようにした。そして、搬送室10を構成するフレームを気密状態に覆う下部蓋板12a、側部蓋板12b及び上部蓋板12cを配置し、下部蓋板12aに設けられた開口部を介してフレームの下部フレームに搬送ロボット1のベースユニット6を懸架状態に取付けた。
(もっと読む)
半導体ウェーハ取扱いロボット用ピボットアーム組立体及びその製造方法
ロボットのピボットアーム組立体を製造する方法は、剛体で加工可能な材料から円形の円盤を形成すること、及び円盤の中心を貫通して円形の穴を形成することを含む。穴を画定する内側表面に外側軸受トラックが一体的に形成されると共に、その穴あき円盤が、外側軸受トラックに係合する固定部を備えた加工装置内に位置決めされる。そして、一体の外輪、アーム、歯付き歯車セグメントが円盤に加工され、ピボットアーム組立体の外側部分が形成される。内側軸受トラックを備えた内倫が一体の外輪の内側に位置決めされ、転がり軸受要素が第1及び第2の軸受トラックに挿入される。 (もっと読む)
搬送装置および機構体
【課題】 ガスカーテンを通過して被搬送体を搬送しても、ガスカーテンを超えたガスの移動が発生しにくい搬送装置および機構体を提供する。
【解決手段】 被搬送体14を載置、牽引、または押して移動方向への駆動力を与える機構体15が、ガスカーテンを通過して被搬送体を搬送する搬送装置11において、該ガスカーテンが該被搬送体の搬送方向16に対して所定の噴射速度でガスを噴射して形成され、該ガスの噴射方向19と該搬送方向16とに垂直な方向の該機構体15の厚みが、該噴射方向19の上流側または下流側の少なくとも一方の端部に向かって、徐々に薄くなることを特徴とする。そうすることによって、搬送装置11は、機構体がガスカーテンを通過して被搬送体14を搬送しても、ガスの乱れが発生しにくいので、ガスカーテンによる閉塞効果が高く、ガスカーテンを超えてガスが移動しにくい。
(もっと読む)
塗布方法
【課題】バックグラインド工程を経て極薄に研削されたウエハの研削面に、塗布剤を滴下し、平滑化させて所定の膜を形成する際、ウエハを破損しないようになされた塗布方法を提供する。
【解決手段】ウエハWの片面に固定治具を密着固定した状態で搬送し、塗布装置で保持する。固定治具として、板状の治具本体と、当該治具本体の片面に設けられた、半導体ウエハを着脱自在に密着保持する密着層とから構成する。治具本体は、片面に前記密着層を支持する複数の支持突起を有すると共に、片面の外周部に前記支持突起と同等高さの側壁を有し、この側壁の端面に前記密着層が接着されて、前記密着層と前記治具本体との間に前記側壁で囲われた区画空間が画成され、前記治具本体に前記区画空間に連通する通気孔7が形成され、この通気孔を介して前記区画空間内の空気を吸引することにより、前記密着層が変形されるものを用いる。
(もっと読む)
基板搬送機構及びそれを備えた基板処理装置
【課題】大幅なコスト増大を招来することなく、各処理工程毎に基板の欠損の有無の検査及び/又は基板の受け渡し完了の確認を行うことのできる機構及びそれを備えた基板処理装置を提供する。
【解決手段】前段の工程から基板を受け取って搬送し、後段の工程へと引き渡す基板搬送機構において、矩形基板80の対向する2辺を保持する一対の支持アーム61,62を備えた基板支持手段と、前記基板支持手段を移動させる移動手段65〜68と、前記支持アーム61,62の先端に設けられ、基板80を検出して信号を発生するセンサ70a,bと、前記基板80の受け取り又は引き渡しの際にセンサ70a,bの前を通過する基板80の辺縁部分について前記センサ70a,bから出力される信号に基づいて基板の欠損の有無及び/又は基板の受け渡しの完了を判定する判定手段とを設ける。
(もっと読む)
基板容器用ロボットハンドと蓋付基板容器
【課題】容器及び蓋からなる薄い基板容器を、容器に挟み込む力を作用させることなくハンドリングして、炉内に積層して載置し、炉内から搬出することができ、これにより基板の汚染を防止しながら水蒸気アニール処理をし、かつ炉内処理領域への基板のセット数を高めて、スループットを高めることができる基板容器用ロボットハンドと蓋付基板容器を提供する。
【解決手段】水平に位置する蓋付基板容器3の外縁に沿って延び、水平かつ対向して互いに平行に拡縮可能な1対の容器支持枠12と、容器支持枠を蓋付基板容器の外縁に近接する縮小位置Cと離れた拡大位置Oとの間で移動させる支持枠駆動装置14と、支持枠駆動装置を支持し、容器支持枠を間隔を隔てて水平に囲む枠部材16とを備える。蓋付基板容器3は、その外周の少なくとも一部に所定角度のテーパ下面3cを有し、1対の容器支持枠12は、縮小位置においてテーパ下面に近接しかつ同一角度のテーパ上面12aを有する。
(もっと読む)
ベルヌーイワンド
薄い(例えば、200mm)半導体ウェーハ(60)をラックと熱プロセスチャンバとの間で搬送するためのベルヌーイワンド(50)。ワンド(50)は、ウェーハ(60)全体を覆うように構成されるヘッド部分(54)を有する。ヘッド(54)は、ウェーハ(60)の上面(62)とウェーハの下面(68)との間に圧力差を生み出すために、ウェーハ(60)の上面に沿ってガスの流れを生成するように構成される複数のガス出口(74)を有する。圧力差は、ベルヌーイの原理を使用して、ウェーハ(60)をワンド(50)のヘッド部分(54)より下に実質上非接触式に支持する揚力を発生させる。 (もっと読む)
コンベヤと半導体処理ツール搭載ポートとの間のインタフェース装置
本発明は、容器輸送システム(160)と処理ツール(10)の間で容器を移送するためのツール搭載装置に関する。ツール搭載装置は、単一又は複数の搭載ポート(12)を使用する。ツール搭載装置は、処理ツール(10)の搭載ポート(12)と処理ツールを通る容器輸送システム(160)の部分との間に配置される。ツール搭載装置は、従来の搭載ポート(12)と、例えばコンベヤ(160)との間で容器を移動させる改良方法を提供する。別の実施形態では、ツール搭載装置は、搭載ポート(12)の前を通る容器輸送システム(160)に実質的に平行である経路に沿ってツール搭載装置を移動させるx方向駆動アセンブリに連結され、ツール搭載装置が複数の搭載ポート(12)を使用することを可能にする。 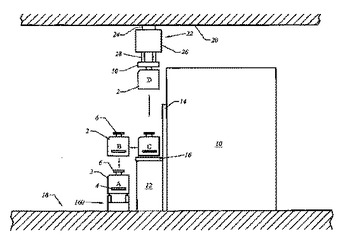 (もっと読む)
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】 装置構成の簡素化を図るとともに、基板の確実な搬送が可能であり、大型基板に好ましく適用される基板搬送装置及び基板搬送方法を提供する。
【解決手段】 基板搬送装置1は、第1装置101と第2装置102との間の中間位置M1に配されるコンベア40と、中間位置M1と第2装置102との間で基板Pの移送を行うアーム機構20とを備える。アーム機構20は、基板Pを支持する棒状部材21と、棒状部材21の一端が固定された基部30と、基部30に設けられコンベア40による基板Pの搬送を補助する搬送補助部35とを有する。
(もっと読む)
クリーニング機能付き搬送部材と基板処理装置のクリーニング方法
【課題】 半導体、フラットパネルディスプレイ、プリント基板などの各種の基板処理装置に付着する0.2〜2.0μm程度の粒子径の異物を効率良く除去できるクリーニング部材を提供することを課題とする。
【解決手段】 搬送部材の少なくとも片面にクリーニング層が設けられてなるクリーニング機能付き搬送部材において、クリーニング層の膜厚のばらつきが10%以下であることを特徴とするクリーニング機能付き搬送部材、とくに、上記のクリーニング層が実質的に粘着力を有しない上記構成のクリーニング機能付き搬送部材。
(もっと読む)
41 - 51 / 51
[ Back to top ]