
Fターム[5F031GA41]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670)
Fターム[5F031GA41]の下位に属するFターム
駆動機構 (1,726)
動作 (3,504)
複数のアームを有するもの (389)
Fターム[5F031GA41]に分類される特許
21 - 40 / 51
基板処理方法、及び基板処理装置
【課題】不良デバイスの発生を抑制でき、デバイスの生産性の低下を抑制できる基板処理方法を提供する。
【解決手段】保持部に搬送された基板に対して第1手順に対応した第1処理を実行する基板処理方法は、保持部に搬送された基板の歪みに関する情報を検出することと、歪みに関する情報に基づいて、基板に対して第1処理と異なる第2処理の要否を判断することと、を含む。
(もっと読む)
ストッカー

【課題】効果的に内部環境を清潔に維持することができるストッカーを提供する。
【解決手段】本発明の実施形態によるストッカー102は、複数の収納台22を有する本体部20;収納物を移送させる移送部;前記移送部によって移送された前記収納物を前記本体部の前記収納台に積載するロボットアーム40;そして前記ロボットアームと共に動きながら、前記本体部の内部のパーティクルを除去する集塵ユニット;を含む。
(もっと読む)
半導体製造方法及び基板処理装置
【課題】基板表面の不純物による汚染を防止するために基板の搬送環境を整える。
【解決手段】基板を予備室1から搬送室3を介して処理室2に搬送する工程と、処理室内で基板を処理する工程と、処理済基板を処理室2から搬送室3を介して予備室1に搬送する工程とを有し、基板を搬送する各工程では、基板の存在する室に連通する室の全てに対して、不活性ガスを供給しつつそれぞれの室に接続された排気系の全てより真空ポンプを用いて排気する。
(もっと読む)
搬送機構
【課題】所望の中間搬送位置に被搬送物を搬送可能な、簡易で且つ安価な構成の搬送機構を提供する。
【解決手段】圧縮エアにより第一の搬送位置Aと第二の搬送位置B間を選択的に往復動するピストン部材54とを含むエアアクチュエータ50と、ピストン部材54に連結され被搬送物を保持する保持手段と、を具備する。第一の搬送位置Aと第二の搬送位置Bとの間の所望の位置に少なくとも1個の中間搬送位置Mを有し、中間搬送位置に対応して停止手段52が配設されている。当接部材66が作用位置に位置づけられると、エアアクチュエータ50によって移動される保持手段が当接部材66に当接することによって保持手段の移動が停止され、当接部材66が非作用位置に位置づけられると、保持手段が当接部材66に当接することなく移動することができる。
(もっと読む)
基板処理装置
【課題】基板保持具の姿勢を検知することで、該基板保持具の傾きを起因とした該基板保持具と基板の破損を未然に防ぐ基板処理装置を提供する。
【解決手段】基板を処理する処理室と、該処理室で基板を保持する基板保持具14と、該基板保持具を載置する載置部と、該載置部に対して相対回転可能に設けられ相対回転により前記基板保持具を係合解除可能なロック部材と、該ロック部材と前記載置部とを相対回転させる回転部と、該回転部の回転動作を検出する検出部とを具備する。
(もっと読む)
物体搬送装置
【課題】物体を搬送する支持機構部のサイズを変更できる物体搬送装置において、支持機構部を軽量な構成とするものを提供する。
【解決手段】支持機構部100は、基板60を支持する支持部材として、固定フレーム10、可動フレーム20および可動フレーム30を備える。可動フレーム20および可動フレーム30は、それぞれ筋肉チューブ40および筋肉チューブ50を介して固定フレーム10に連結される。筋肉チューブ40および筋肉チューブ50の伸縮に応じ、可動フレーム20および可動フレーム30が固定フレーム10に対して摺動する。
(もっと読む)
ベアリングユニット、フリーボールベアリング、支持テーブル、搬送設備、ターンテーブル
【課題】フリーボールベアリングからチャンバ内への粉塵の飛散を防止することができ、しかも受け球を押さえ込んで主球の回転抵抗を増大させるための受け球押さえリングの移動抵抗を、グリスを使用しないノングリス方式にて低く抑えることができる技術の提供。
【解決手段】本体20の球受け部23の半球状凹面21と主球42との間に挿入して受け球42を押さえ込むことで主球42の回転抵抗を増大させるリング状の押さえ片55を有する受け球押さえリング50を内蔵するフリーボールベアリング110を台板89aに固定し、受け球押さえリング50に固定されたロッド62を移動して受け球押さえリング50を待機位置から受け球押さえ位置に移動する押さえ用駆動装置70が台板89aの裏面側に設けられているベアリングユニット、フリーボールベアリング110、支持テーブル、搬送設備、ターンテーブルを提供する。
(もっと読む)
ウエハ搬送方法およびウエハ搬送装置
【課題】 半導体ウエハが収容された状態で意図せず乾燥してしまうことを防止することが可能なウエハ搬送方法およびウエハ搬送装置を提供すること。
【解決手段】 コンベア1によって搬送されるウエハWfを収容カゴ3に収容する、ウエハ搬送方法であって、コンベア1によって鉛直方向と異なる方向に搬送されるウエハWfを、方向転換器2によってその面内方向が鉛直方向に沿い、かつ鉛直方向下方に進行するようにウエハWfの進行方向を転換した後に、ウエハWfを、液体Lq中に配置されかつ鉛直上方に開口する収容カゴ3に収容する。
(もっと読む)
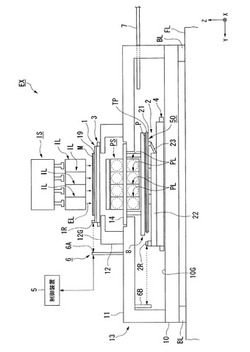
センサキャリアにより基板処理システム内の物体の位置を自動的に測定して教示する方法および関連するセンサキャリア
本発明は、センサキャリア(1)がロボットエンドエフェクタ(24)により移動する、基板処理システム(20、26)内の物体(11)の位置を自動的に測定して教示する方法に関する。センサキャリア(1)のセンサユニット(2、3、4、5a、5b)は、物体(11)の縁部(10a、10b)を横切って移動直線(B1、B2、B3)に沿って移動し、センサユニット(2、3、4、5a、5b)のそれぞれは、縁部(10a、10b)の検出時に値を変更する少なくとも1つのセンサ信号を出力する。各移動直線(B1、B2、B3)に沿った信号変更の位置から、物体(11)の位置が決定される。さらに、本発明は、本発明による方法を実行する、基板のような可動式無線センサキャリアに関し、センサキャリアは、キャリア板(1a)と、キャリア板(1a)上に取り付けられ、物体表面(13)に垂直な移動直線(B1)上でのセンサキャリア(1)の移動中、物体(11)の第1の物体縁部(10a)および第2の物体縁部(10b)を検出するように構成された少なくとも1つの第1のセンサユニット(4、5a、5b)と、キャリア板(1a)上に取り付けられ、物体表面(13)に平行な移動直線(B2)上でのセンサキャリア(1)の移動中、物体(11)の少なくとも第1の物体縁部(10b)を検出するように構成された少なくとも1つの第2のセンサユニット(2、3)とを有する。  (もっと読む)
(もっと読む)
板状部材の位置決め搬送方法及びその装置
【課題】比較的重量に富み、脆弱な板状部材を損傷することなく、位置決め搬送する方法及び装置を提供する。
【解決手段】搬送ロボットBによって位置決め部12の第1ガラス基板受け部20A、20Bを構成する溝にガラス基板100を載置位置決めする。第1ガラス基板受け部20A、20Bは緩衝部材で構成されているために衝撃なくガラス基板100を受け止める。次いで、リフター74が搬送処理部14を上方へと変位させると、前記ガラス基板100は搬送処理部14の第2ガラス基板受け部50A、50Bに移載され、且つガラス基板側部受け部32A〜32D、34A〜34Dによって横方向への変位を阻止されながら、トランスファーマシンEによりセレン化処理炉Fへと搬送される。
(もっと読む)
基板移載装置
【課題】基板からの熱影響を少なくし、省スペース、省配線化及び部品削減を図りつつ、基板の状態を安定して検出することができる基板移載装置を提供する。
【解決手段】基板を移載する基板移載装置300において、基板を載置して搬送する基板搬送部304と、基板の状態を検知する検知部306とを有し、前記基板搬送部と前記検知部とは対立する方向に配置され、互いに独立して移動可能とし、第1のセンサと第2のセンサにより基板の飛び出しを検知する。
(もっと読む)
プリアライナ装置を備えたウェハ搬送システム
【課題】組立調整に時間がかからない構成とし、ウェハ搬送装置とのウェハ受け渡し時間も大幅に短縮したプリアライナ装置によるウェハ搬送システムを提供すること。
【解決手段】ウェハを保持して回転させ、センサによって前記ウェハの外周を検出し、前記センサの検出情報を用いて少なくとも前記ウェハを所望の方向へと回転させるプリアライナ装置において、前記ウェハを保持する把持部材1に、前記ウェハの裏面と接触してこれを吸着保持する吸着面12が形成され、かつ前記ウェハを前記吸着面12へ搬送するウェハ搬送装置のエンドエフェクタ13が進入可能な凹部14が形成されたプリアライナ装置とした。
(もっと読む)
マルチテーブルリソグラフィシステム
リソグラフィ加工物処理装置は、加工物をロードするローディングエリア(108)と、加工物を処理する処理エリア(106)とを含む。加工物処理装置はさらに、ローディングエリアと処理エリアとの間に配置されたマルチテーブルシステム(10)を含む。マルチテーブルシステムは、ローディングエリアと処理エリアとの間を移動しながら、すれ違うように構成された少なくとも2つのテーブル(110,112)を含む。少なくとも2つのテーブルはそれぞれ、加工物を保持するように構成される。  (もっと読む)
(もっと読む)
プラズマ処理装置
【課題】処理室内の試料台の結露を抑制し信頼性を向上させる。
【解決手段】真空容器内部に配置されガスが供給されてプラズマが形成される処理室200と、前記処理室内に配置されウエハが載置される前記略円筒形の試料台250と、前記試料台の下方で前記ガスが排気される開口204と、前記試料台内部に配置され熱交換媒体が流れる媒体用通路304と、前記処理室内で水平方向に前記試料台を支持する梁216と、前記試料台内の前記通路の下方に配置され内部が大気圧にされた円筒形の空間214と、前記空間の内側壁と前記真空容器外とを連通する連結路309と、この連結路内に配置された前記熱交換媒体用管路と、前記空間内に配置された中央側のウエハ用ピンの駆動機構308及びこの外周側で複数の前記媒体用管路の前記試料台との接続部を覆う複数の金属製ブロックとの間から高温のガスを供給し前記連結路を通り前記空間内のガスが外部に排出する。
(もっと読む)
デバイス収容装置
【課題】デバイスケース内に収容したデバイスの散乱を防止可能なデバイス収容装置を提供する。
【解決手段】デバイスケースを水平移動させるデバイスケース移動手段を備えたデバイス収容装置であって、該デバイスケースの一方の側部の外側に固定的に設けられ、出射光の光路が該デバイスケースの上面から所定距離以内を通過するように位置付けされた発光部と、該発光部に対向して該デバイスケースの他方の側部の外側に固定的に設けられ、該発光部の出射光を受光するように位置付けられた受光部と、該受光部に接続されデバイスの該デバイスケース内への収容状態の正常と異常を判定する判定手段とを含むデバイス収容状態検出機構110を更に具備し、該デバイスケース移動手段によって該デバイスケースが該発光部の出射光の光路の下側を移動する際、該受光部の受光が遮断された場合に、該判定手段がデバイスの収容状態の異常を判定し異常信号を出力する。
(もっと読む)
吸着装置および吸着方法
【課題】吸着パッドに生じた摩耗や位置ずれを自動的に検知する吸着装置を提供する。
【解決手段】吸着パッド10の基準位置L0における吸着力F1を吸着センサ30が測定し、測定された吸着力F1が閾値THより小さいと判定部42が判定した場合には、駆動部20が吸着パッド10を昇降方向または交差方向に所定の変位量を変位させ、変位した位置(変位位置LD)における吸着パッド10の吸着力F2を吸着センサ30が測定するとともに、吸着力F2が閾値THより大きいと判定部42が判定した場合の変位量ΔLを取得する機能を有する制御部40を備える吸着装置100。
(もっと読む)
真空プロセッサ中の誘電体工作物のための静電デチャッキング方法および装置
【課題】真空プラズマ・プロセッサ中で工作物を静電的にチャッキング及びデチャッキングするための新規の改善された方法及び装置を提供する。
【解決手段】真空プラズマ加工チャンバ10中で加工されるガラス工作物32は、工作物を締め付けるために十分に高い電圧を維持しながら加工中にチャッキング電圧を徐々に下げることによりデチャッキングされる。加工中のチャッキング電圧は、チャッキング力及びチャックに流れる伝熱流体の流量に応答して制御される。加工終了時にチャックに印加される逆極性電圧がデチャッキングを援助する。工作物温度は、加工の終了時に高い値に維持される。チャックからの工作物持上げ時のチャック中を流れるピーク電流は、次のデチャッキング操作中の逆極性電圧の振幅及び/または持続時間を制御する。チャンバ10中の不活性プラズマが、チャック30からの工作物持上げ時に工作物32から残留電荷を除去する。
(もっと読む)
プローブ試験および選別装置
【課題】半導体製造工程の後工程においてのプローブ試験および選別工程を統合した装置を提供する。
【解決手段】試験区26を有し、試験区26はプローブ試験装置を有し、プローブ試験装置はウェハーリング上のチップに試験を行なう。試験済みのウェハーリングは搬送装置22によって試験区26から選別区24に搬送される。選別区24は選別装置を有し、選別装置は試験結果に基づいてウェハーリング上のチップを複数の選別容器中に分配する。
(もっと読む)
処理システム及び処理システムを運転する方法
コーティングシステム1は、スイングモジュール及びチャンバ配列を含むスイングステーション2を含む。チャンバ配列は、ロックチャンバ3及び第1コーティングチャンバ4を含む。ロックチャンバ3は、結合されたロックイン/ロックアウトチャンバとして構成される。チャンバ配列は、破線で示される第1実質的直線搬送経路T1及び破線で示される第2実質的直線搬送経路T2を有する。経路T1、T2の配置は、デュアルトラックを確立する。システム1は、矢印で示されるように、チャンバ配列3、4を通って、第1搬送経路T1に沿って、及び/又は、第2搬送経路T2に沿って、基板を移動させるための搬送システムを含む。1又は特に両方のチャンバ3、4は、デュアル又はトリプルトラックセクションの横移動によって、第1経路T1から第2経路T2へ、及び/又は、第2経路T2から第1経路T1へ基板/キャリヤを移動させるための移動手段を含む。 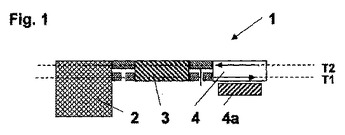 (もっと読む)
(もっと読む)
ウエーハレベルパッケージング用の半導体ダイソータ
半導体ダイをソートするためのダイソータが提供される。ダイソータは、ダイをソートするための割出し機構を備えた回転タレットモジュール(19)を備え、回転タレットモジュール(19)は回転動作を生成するためにモータにさらに結合される。フリッパーモジュール(20)のフリップ工程を可能にするために、回転作動手段(72)を備えた複数のフリッパーモジュール(20)が回転タレットモジュール(19)に結合される。一実施形態において、ダイのピックアンドプレース作業のためにキャビティシャトル(93)を開放位置に移動させるために複数のシャッター開放装置(55)がフリッパーモジュール(20)に作動可能に結合される。好ましい一実施形態において、フリップ機構を始動させる前にキャビティホルダ(74)のロックを解除するために複数のキャビティ解除手段(57)がフリッパーモジュール(20)に作動可能に結合され、それ故キャビティ解除手段(57)は回転タレットモジュール(19)上に設置されたカム機構である。フリッパーモジュール(20)はさらに、フリッパーモジュール(20)を水平位置に固定し、かつそれが横滑りしないようにするためにキャビティロック(75)を備える。好ましい一実施形態において、シャッター開放装置(55)はモータに作動可能に結合され、これによりモータの時計回りまたは反時計回りのいずれかの1回の回転動作によってキャビティシャトル(93)が開放される。 (もっと読む)
21 - 40 / 51
[ Back to top ]