
Fターム[5H004GA30]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 設計の容易化 (176)
Fターム[5H004GA30]に分類される特許
101 - 120 / 176
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法

【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
パラメータ同定装置及びパラメータ同定プログラム

【課題】複数のパラメータの同定を適切に行う。
【解決手段】同定パラメータの変化量と表間数の変化量の関係(影響度)を調べる(ステップ11)。影響度に応じて各パラメータの影響度が所定の関係になるように補正量を求める(ステップ12)。求めた補正量により修正ゲインを補正する(ステップ13)。
(もっと読む)
制御システムおよび制御支援装置
【課題】より適切なサーボの制御条件の設定を短時間で実現する制御システムおよび制御支援装置を得ること。
【解決手段】負荷装置113を駆動するモータ112を制御するサーボシステム100と、前記サーボシステム100に接続され、前記モータ112を所定の目標動作に制御するために設定される調整パラメータの最適値を自動調整する制御支援装置200と、で構成され、前記制御支援装置200における調整パラメータ調整部210はシミュレーション結果に基づいて、調整すべきパラメータやその調整範囲を自動設定し、調整範囲内で調整パラメータの最適値をモータ112の実動作の結果に基づいて自動調整する。
(もっと読む)
PID制御支援装置
【課題】PID調節器のパラメータの調節にかかる手間を軽減しつつ、複数の制御対象間で起こる干渉を考慮した制御を実現する。
【解決手段】伝達関数行列パラメータ同定手段16は、操作量MVの時系列データと、操作量MVに応じて制御対象13から出力される制御量PVの時系列データに基づいて、予め構造が設定された制御対象13を表現する伝達関数行列のパラメータを同定し、PIDパラメータ計算手段15は、伝達関数行列パラメータ同定手段16にて同定された伝達関数行列のパラメータに基づいて、制御対象13を制御するPID調節器12のパラメータを計算し、モデル予測制御パラメータ計算手段14は、伝達関数行列パラメータ同定手段16にて同定された伝達関数行列のパラメータに基づいて、PID調節器12の設定値SVPIDをモデル予測制御にて制御するパラメータを計算する。
(もっと読む)
PIDパラメータ調節支援装置
【課題】熟練を要することなく、PIDパラメータを適正に調節できるようにする。
【解決手段】複数伝達関数パラメータ同定手段14は、制御対象13に入力される操作量MVの時系列データと、操作量MVに応じて制御対象13から出力される制御量PVの時系列データに基づいて、予め構造が設定された制御対象13を表現する複数の伝達関数のパラメータを同定し、適合率計算手段15は、その伝達関数による制御量PVの推定値と、制御対象13から出力された制御量PVの実測値との適合率を計算し、最良適合率伝達関数選択手段16は、適合率計算手段15にて計算された適合率の最も良い伝達関数を制御対象13のモデルとして選択し、最適PIDパラメータ探索手段17は、最良適合率伝達関数選択手段16にて選択された伝達関数を対象として、予め決められた評価指標が満たされるようにPIDパラメータを探索する。
(もっと読む)
制御システムのための制御パラメータを確定する方法
【課題】制御システムを同調する方法を改良することによって、用いるのに容易で且つ最小の実際のプラント動作しか必要としない方法及びシステムを提供する。
【解決手段】コントローラ(14)及びプラント(10)を有する制御システムのための制御パラメータを確定する方法は、プラントのモデル(70)及びコントローラのモデル(64)を確立するステップ、及び閉ループ・システムに関する性能指数を、選択された安定余裕を説明するコントローラ・パラメータの関数として計算するステップを含む。
(もっと読む)
技術システムの状態をコンピュータ支援のもとで探査する方法
本発明は技術システムの状態をコンピュータ支援のもとで探査する方法に関する。この方法によれば、技術システムのその時その時の状態において新しい状態へと導く行動を実行することにより、技術システムの状態が次々と走破される。探査中に状態と行動の大量のデータが実行されるとともに、例えば技術システムの損傷又は動作不良状態をもたらすかもしれない許容されない行動が行われないことを保証するために、安全性関数と復帰規則が使用される。本発明による方法によれば、技術システムに関する大量の状態と行動を集め、これらの状態と行動を技術システムの適切な調整を決める教示方法において使用することが可能である。本発明による方法は任意の技術システムに適用することができる。好ましい適用形態はガスタービンの状態の探査である。本方法は技術システムの実稼働時と技術システムの動作シミュレーション中の両方において使用できる。 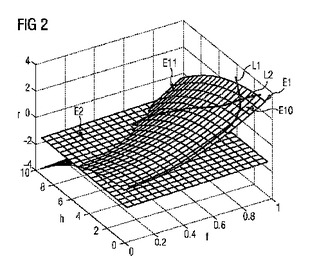 (もっと読む)
(もっと読む)
プラント運用計画装置、そのプログラム
【課題】定常プラントシミュレータに関するユーザの設定の手間を大幅に軽減する。
【解決手段】固定値設定部12は、各プラント構成機器の変数(入出力状態量等に係る変数)の中で、任意の変数を固定値あるいは非固定値として設定させる。また、固定値変数の値を任意に設定させる。計算順序決定部13は、固定値設定部12による設定に応じた計算順序を決定する。定常プラントシミュレータ部14は、この計算順序に従ってシミュレーション処理を実行して各非固定値変数の値を算出する。
(もっと読む)
慣性共振系を制御対象とする特性同定方法及びモータ制御装置
【課題】 少ない同定演算量で特性を同定することのできる特性同定部を備えたモータ制御装置を提供する。
【解決手段】 モータ制御装置は、駆動指令を受けるモータと被駆動部との間を動力伝達機構で連結した慣性共振系を制御対象とし、該制御対象の状態を計測する計測手段と、前記駆動指令及び前記計測手段で計測された前記制御対象の計測結果に基づいて前記制御対象の特性として前記慣性共振系の少なくとも共振周波数及び反共振周波数を同定する特性同定部を含み、同定された特性に基づいて前記モータへの駆動指令を調整する。
(もっと読む)
プロセス制御装置およびパラメータ最適調整方法
【課題】調整または試験段階における労力と時間を軽減しつつ、入出力にむだ時間を含むプロセスにおけるPI調節器およびPID調節器のパラメータを簡易な計算で決定するとともに、様々のプロセスに広く適用できるようにする。
【解決手段】最適調整手段13には、プロセス制御装置11として用いられるPI調節器またはPID調節器の時定数およびゲインをそれぞれ決定するゲイン決定手段13aおよび時定数決定手段13bが設けられ、ゲイン決定手段13aおよび時定数決定手段13bは、制御対象12のプロセスの目標値SVから制御量PVまでの閉ループ伝達関数Gcの絶対値が低周波帯域において1になるように、PI調節器またはPID調節器の時定数およびゲインをプロセスの係数から決定する。
(もっと読む)
フィードバックループの制御方法
【課題】従来のフィードバックループの制御方法は、フィードバックループのループゲインを固定値としているので、動特性と静特性とを両立することができず、動特性及び静特性のいずれか一方を犠牲にする必要がある。
【解決手段】本発明によるフィードバックループの制御方法は、制御偏差εである角度差Nθ−φに対応した処理信号KE1sin(Nθ−φ)の大きさを監視し、この処理信号KE1sin(Nθ−φ)の大きさに応じて第1及び第2ループ内増幅器107,108のいずれか一方のみを接続状態とすることで、回転位置信号変換回路100のループゲインを第1ゲイン107aと第2ゲイン108aとで切り替える。
(もっと読む)
機器制御方法及び機器制御装置
【課題】 複数入力一出力形態の機器制御において、取得の容易なモデル制御パターンを用意するだけで、簡単で開発工数の少ないアルゴリズムにより、任意の入力値に対し意図通りの出力結果が得られる機器制御方法を提供する。
【解決手段】 第二種入力変数βと出力変数αとが張る制御パターン空間CPSにおける、各被モーフィング座標点pa,pb,pcに対応するJ個のモデル制御パターンPA,PB,PCの形状を、M次元部分入力空間MPSにおける各被モーフィング座標点pa,pb,pcの実制御座標点pxまでの距離に応じた重みにてモーフィングすることにより、実制御座標点pxに対応する合成制御パターンPxを作成し、該合成制御パターンPxに基づいて入力値pxに対応する出力変数α値を計算する。
(もっと読む)
モータモーション用シミュレータ
【課題】プログラマブルコントローラに対して実モータを制御するための制御パラメータを容易に設定可能とする。
【解決手段】実モータ7に模擬して当該実モータに対応した性能等を有するシミュレート用モータの画素部品17a,17b,17c,…を格納するモータライブラリ画面15aと、シミュレート用のモータ制御パターンをポインティングデバイス操作でグラフィック表示画像に作成できるシミュレート用GUI画面15bと、を有したコンピュータからなり、モータライブラリ画面からシミュレート用モータを選択しかつポインティングデバイスでシミュレート用GUI画面上のモータ制御パターンに沿う操作を行うことで、そのモータ制御パターンに対応する実モータの上記モータ制御パラメータを提供することができるようになっている
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定が適切に行われたかを判定する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。パラメータを変化させた時の出力評価関数値の変化量について、比較して強い相関の組み合わせがあるかを全てのパラメータ同士の出力評価関数値の変化量について判定する(ステップ12,13)。強く相関の組み合わせがある場合に物理モデルまたは最適化対象の出力が物理パラメータを真値に漸近させるための十分な情報を含んでいないと、判断する(ステップ14)。
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定を早期に適切に終了する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。ここにおいて、i回目の前記比較において得られる誤差(誤差の二乗和:ja(i))の変化量に基づいて、パラメータの修正量(勾配ベクトルの各要素S(i))についての上下限値(±Smax)を設定する(ステップ20)。これによって、上下限値が逐次変更され、適切な制限を掛けることができる。
(もっと読む)
フィードバック制御系の設計方法、設計プログラム、および設計支援装置
【課題】効率的に安定かつロバストな現実のシステムを設計すること。
【解決手段】制御系の共振モードを補償するノッチフィルタおよび共振モードを合成した全域通過フィルタがモデル化され(ステップS105)、全域通過フィルタを含む設計用制御対象が決定される(ステップS106)。そして、制御器に含まれる重み関数が導出された後(ステップS111)、設計者が設定した目標ゲイン交差周波数および位相余裕が用いられて、重み関数のゲインが調整される(ステップS112)。その後、位相進み重みに含まれる位相変数が決定されて、重み関数が確定される(ステップS113)。このようにして確定された重み関数および設計用制御対象に対してH∞ループ整形法が適用され(ステップS114)、H∞制御器が導出される(ステップS115)。
(もっと読む)
深冷蒸留装置の制御方法
深冷蒸留分離装置の制御方法において、少なくとも1つの操作変数が変更され、各操作変数は少なくとも1つの制御変数を用いて変更されており、それによって各制御変数は、一つの制御方法を用いて調節され得、1つの制御変数の少なくとも1つのセットポイントを制御するために予測制御方法が使用される。  (もっと読む)
(もっと読む)
学習型制御装置および該方法
【課題】本発明は、目標軌道を必要とすることなく、目標姿勢を与えるだけで制御対象を制御可能な学習型制御装置および該方法を提供する。
【解決手段】本発明では、制御対象Cの制御方法を学習することによって制御対象Cを制御する学習型制御装置Dであって、制御対象Cをフィードフォワード制御するフィードフォワード制御部として機能する逆スタティックモデル部1と、制御対象Cをフィードバック制御するフィードバック制御部3とを備え、逆スタティックモデル部1は、フィードバック制御部3の制御指令uactor(t)を教師信号として入出力関係を学習すると共に、制御対象Cの目標姿勢が入力されこの目標姿勢を実現するための制御指令uism(t)を出力する。
(もっと読む)
モデルパラメータ推定演算装置及び方法、モデルパラメータ推定演算処理プログラム並びにそれを記録した記録媒体
【課題】1入力複数出力系の一次遅れシステムにおいて、質や量の不十分な入出力波形データからでも、精度と信頼性の高いモデルパラメータを推定演算してモデルを構築する。
【解決手段】入出力データに基づいて1入力複数出力系の一次遅れシステムのモデルパラメータを推定して演算するモデルパラメータ推定演算装置10において、当該モデルパラメータ推定演算装置10は、上記入出力データに基づいて、上記1入力複数出力系の一次遅れシステムの時定数と定常利得との少なくとも1つを含む先験的情報を、制約条件と評価関数のうちの少なくとも一方として考慮して上記モデルパラメータを推定演算する。ここで、上記先験的情報は、時定数と定常利得の上限値と下限値の少なくとも一方である。
(もっと読む)
プロセスシミュレーション装置
【課題】 短時間で任意の入出力関係を定義できると共に、接続するコントローラに対して汎用性備えるプロセスシミュレーション装置を実現する。
【解決手段】 コントローラからの操作量を入力し、プロセスの応答を模擬する制御量を前記コントローラに出力するプロセスシミュレーション装置において、
前記操作量を入力ポートに読み込み、これに対して所定の演算を実行した結果を制御量として出力ポートに書き込むデータ連携手段を備える。
(もっと読む)
101 - 120 / 176
[ Back to top ]