
Fターム[5H004GA30]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 設計の容易化 (176)
Fターム[5H004GA30]に分類される特許
121 - 140 / 176
プラントの温度を制御する電子制御装置

【課題】温度推定モデルにおける非線形な関数(テーブルやマップ)を温度センサ出力に基づいて修正する。
【解決手段】電子制御装置は、プラントの温度推定値を算出するプラントモデルについて、プラントに関わる第1のパラメータとプラントモデルに関わる第2のパラメータとの相関モデルを用いて温度推定値を算出する。この装置は、さらに算出されたプラントの温度推定値に基づいてプラントの温度を制御する。また、相関モデルに対し、複数の第1のパラメータの範囲に対して定義された複数の関数(Wi)を定義し、この複数の関数の高さを調整する修正係数(Kli,Kci)を温度センサの出力と算出されたプラントの温度推定値に基づいて算出し、複数の関数(Wi)および修正係数(Kli、Kci)により前記相関モデルを修正する。
(もっと読む)
プロセス制御ネットワークで用いられる最適自動チューナ

【課題】プロセス制御装置の制御に用いられるチューニングパラメータの最適な一組を生じさせ、プロセスや装置の特性を明確に特徴付けなくとも制御できるようにする。
【解決手段】コントローラ44により用いられる複数組のチューニングパラメータを生成し、ブロック化された正弦波信号のようなテスト信号rをコントローラに送り、これにより、複数組のチューニングパラメータの各組がコントローラ44により用いられている間にプロセス制御ループ30にテストサイクルを経させ、テストサイクルの各々の間にプロセス制御ループ30の応答値を測定する。測定された応答値に基づいて複数組のチューニングパラメータの各組に対する性能指数を計算し、計算された性能指数に基づいてチューニングパラメータの複数組のうちの一組を選択する。チューニングパラメータの選択された組は、プロセス制御ループ30の正規動作の間に用いられる。
(もっと読む)
制御パラメータの自動適合システム
【課題】実機を用いてシミュレーションモデルの近似誤差を排除しつつ、実機の使用による学習時間の増加や特性のバラツキ・ドリフトによる影響を抑制し、良好な最適パラメータを高速且つ効率的に得る。
【解決手段】自動適合システムは、実機を自動運転して評価値を算出し、学習演算部50で多目的遺伝的アルゴリズムを用いて制御パラメータを最適化する。学習演算部50は、個体の適合度を算出する適合度算出部52と、親個体を選択する際に、適合度が同等の場合、他の個体との粗密の度合いに応じた指標を用いて解の優劣を判定する親選択部53と、親個体から子個体を生成させる世代交代部54と、子個体を選択的に複数回評価する子個体評価部55と、次世代に保存する個体を選択する生存選択部56とを有し、実機の使用による学習時間の増加や特性のバラツキ・ドリフトの影響を抑制し、良好な最適パラメータを高速且つ効率的に得る。
(もっと読む)
シミュレータ及び記憶媒体及びプログラム及び制御装置及びシミュレータの制御方法
【課題】本発明は制御装置を代えずに制御システムを高機能化及び高速処理化することを課題とする。
【解決手段】シミュレータ10には、シーケンサ20と、軌道生成器30と、理想フィードバック制御器40と、ホルダ50と、実システムモデル60とがコンピュータ上の仮想機器として形成される。理想フィードバック制御器40は、シミュレータ10上において、制御対象モデル90の状態量と、動作指令パターンから実システムモデル60への入力を決定し、フィードバックループを策定すると共に、実システムモデル60への入力を時系列データとしてメモリ15に出力する。ホルダ50は、シミュレータ10上において、実システム110上のシーケンサ112のサーボサイクル毎に演算結果によって値が更新され、次のサーボサイクルまで値を保持する。ホルダ50で生成される理想制御入力の更新周期は、シーケンサ112と同じサーボサイクルになる。
(もっと読む)
変換器パラメータの最適推定装置および方法
【課題】この発明の目的は、変換器の線形特性のモデルが完全でなくても、線形パラメータおよび非線形パラメータをシステム誤差なしで決定できる変換器パラメータの最適推定装置を提供することにある。
【解決手段】変換器1への入力信号x(t)を受信するために変換器入力端子7に接続された第1の変換入力端子61、変換器1の出力信号y(t)を受信するために変換器出力端子9に接続された第2の変換入力端子57、出力信号y(t)に含まれる線形信号成分ylin(t)の情報は抑制され、かつ出力信号y(t)に含まれる非線形信号成分ynlin(t)の情報は保持されている時間信号を発生する第1の変換出力端子67、69、および線形信号成分ylin(t)の情報を保持する第2の変換出力端子63、65を有する変換システム55を備えている。
(もっと読む)
カルマンフィルタを用いて動的モデルの状態を初期化するためのシステム及び方法
【課題】 ガスタービンエンジンを制御する適応制御システム及び方法の提供。
【解決手段】 カルマンフィルタその他同種のフィルタを用いて、動的モデルの状態を初期化するためのシステム及び方法を提供する。制御方法は、エンジン(110)の現在の状態に関する動的情報(Y)を得る段階と、動的情報(Y)の少なくとも一部を用いてエンジンモデル(130)を初期化する段階であって、動的情報(Y)に少なくとも部分的に基づく1以上の値をエンジンモデル(130)に入力する段階と、上記1以上の値に少なくとも部分的に基づいて、モデル(130)からエンジン(110)の現在の状態を求める段階と、エンジン(110)の状態に少なくとも部分的に基づいて、エンジン制御動作を求める段階と、エンジン制御動作を実行するための制御コマンド(U)を出力する段階とを含む。
(もっと読む)
計算機支援による技術システムの開ループ制御および/または閉ループ制御のための方法
本発明は技術システムの計算機支援による開ループ制御および/または閉ループ制御のための方法に関する。本方法は技術システムを記述する高次元の状態空間を効率的により低い次元に縮小するために用いられる。本発明によれば、状態空間の縮退は人工的なリカレントニューラルネットワークによって実行される。状態空間を縮小することにより、専ら低次元状態空間向けに設計されている公知の学習法を、元来大きな状態空間を有する複雑な技術システムに対しても適用できるようになる。それも、従来の方法をこの縮退した状態空間内で実行することにより可能になる。本発明による方法は任意の技術システムに対して、とりわけガスタービンに対して使用することができる。  (もっと読む)
(もっと読む)
ロボットシスシステム及びロボット制御装置
【課題】所望の時刻での位置を高精度に推定することが可能なロボットシスシステム及びロボット制御装置を提供する。
【解決手段】 モータによって所定部位が動作するロボット2と、モータをサーボ制御するサーボ制御器と、個々のサーボ制御器21等に対して動作指令を送信するロボット制御装置1と、を有するロボットシステムにおいて、ロボット2には、モータの回転角度に基づく位置データを検出するセンサと、が設けられ、ロボット制御装置1には、サーボ制御器21等への動作指令を生成するとともに、位置データを受信するホスト制御器10と、現在又は将来の位置データを推定する推定器13と、が設けられ、推定器13は、動作指令とサーボ制御器21等のサーボ制御パラメータを使用したシミュレータ出力を、既に知られた過去の位置データで補正することによって、現在又は将来の位置データを推定する。
(もっと読む)
モデルベース開発におけるモデル簡易化手法
【課題】計算精度をあまり低下させることなく車両ECUに実装するモデルベースを簡易化するためのモデルベース開発におけるモデル簡易化手法を提供する。
【解決手段】予め定めた機関加速パターンに対して全部分モデルベースの部分モデルM1,M2,M3,M4毎に単位時間毎に算出される複数の値の変化量絶対値及び複数の値のうちの少なくとも二つの値の積の変化量絶対値を、それぞれ機関加速パターンにおいて積算した複数の積算値のうちの一つが部分モデル毎の判断値とされ、モデルベースにおいて算出が意図された特定値に最も影響する特定部分モデルの判断値が全ての部分モデルの判断値のうちで最大となるように判断値を選択し、判断値が大きい部分モデルほど優先順位を高く設定し、優先順位の低い部分モデルほど全部分モデルベースから省略されて、特定値の計算負荷が所望計算負荷まで低下されたモデルベースを決定する。
(もっと読む)
制御パラメータの自動調整装置
【課題】制御パラメータを精度良く最適化し、かつ、遺伝的アルゴリズムによる学習速度を向上させることが可能な車両制御における制御パラメータの自動調整装置を提供する。
【解決手段】制御パラメータの自動調整装置1、5は、遺伝的アルゴリズムの手法を用いて制御パラメータP1〜Pnの最適化を行って制御パラメータの最適値P1suit〜Pnsuitを出力する処理部2、6を備え、処理部2、6は、制御パラメータP1〜Pnを遺伝子として含む個体Ikの適合度Qkを算出する適合度算出手段22、62と、複数の個体Ikからなる個体群の中から一部の個体Ikを親個体Ia、Ib、Icとして選択する親選択手段24、64と、選択された親個体Ia、Ib、Icから遺伝的操作により子個体Ik*を生成させる世代交代手段25、65とを有し、最良の適合度Qkを有する個体Ikに含まれる制御パラメータを最適値P1suit〜Pnsuitとする。
(もっと読む)
予測式作成装置、結果予測装置、品質設計装置、予測式作成方法及び製品の製造方法
【課題】実績データが存在しない外挿域の予測精度を向上する、予測式作成装置、結果予測装置、品質設計装置、予測式作成方法及び製品の製造方法を提供することを目的とする。
【解決手段】製造条件とその結果を格納した実績データベース10の各サンプルと要求点との類似度を計算する類似度計算手段121と、該類似度を重みとした重み付き回帰により要求点近傍の予測式を作成する予測式作成手段122とを備える予測式作成装置12により、前記課題を解決でき、さらに、この予測式作成装置12により得られた予測式を用いて、特定した製造条件に基く結果予測、製造条件の制御、製品の品質設計を行うことができる。
(もっと読む)
制御装置、制御パラメータの調整装置、制御パラメータの調整方法およびプログラム
【課題】ユーザによる学習係数の調整作業を不要にすることを目的とする。
【解決手段】制御量の時系列データおよびPID制御パラメータを、状態ベクトルとしてデータベース6に蓄積し、新たな状態ベクトルが与えられると、蓄積されたデータベース6の状態ベクトルに基づいて、局所モデルとして新たな状態ベクトルに対応するPID制御パラメータを生成してPID制御器3のPID制御パラメータを調整するとともに、学習係数を用いて、制御誤差が小さくなるようにPID制御パラメータを修正してデータベース6に蓄積し、前記学習係数を、予め定めた算出式によって算出するようにしている。
(もっと読む)
制御シミュレーションシステム
【課題】制御用ソフトウェアの開発において、実機を用いた検証の手間を軽減することを可能とする制御シミュレーションシステムを提供する。
【解決手段】制御シミュレーションシステムは、制御指令に基づいて機器を制御するために機器インターフェイスを介して送信される電気信号を機器インターフェイスの種類に応じて生成する制御部と、入力インターフェイスを介して入力した入力電気信号を制御指令に変換する中間プログラムを入力インターフェイスの種類に応じて複数記憶する中間プログラム記憶部と、制御部から受信した電気信号を、複数の中間プログラムのうちのいずれかを用いて制御指令に変換して得られた入力制御指令に基づいて、機器の動作をシミュレートする動画を作成して表示するアニメーション部とを備える。
(もっと読む)
多軸工作機械の送り駆動系用最適設計支援装置およびその装置用プログラム
【課題】複数の送り駆動系を同時に動かして所望の形状を創成する場合に、サーボゲインを最適化する設計を容易に行い得るようにすることにある。
【解決手段】コンピュータにより構成される、多軸工作機械の送り駆動系用の最適設計支援装置であって、前記送り駆動系を表す数学モデルを用いて、その送り駆動系に関するシミュレーションを行い、その結果を出力するシミュレーション手段2と、前記送り駆動系に関する実験結果を入力されて、その実験結果と前記シミュレーションの結果との差が小さくなるように、前記送り駆動系を表す数学モデルのパラメータを同定するパラメータ同定手段1と、前記同定したパラメータに基づき、前記送り駆動系を表す数学モデルのサーボゲインを自動調整するサーボゲイン自動調整手段3と、を具えてなる、多軸工作機械の送り駆動系用最適設計支援装置である。
(もっと読む)
プラントモデルのパラメータ調整装置
【課題】パラメータの合わせ込みを効率よく行うことが可能なプラントモデルのパラメータ調整装置を実現する。
【解決手段】プラントモデルのパラメータ調整装置において、表示部と、入力部と、ネットワークを介してプラントからの実測値を受信する通信部と、実測値及びプラントモデルから出力されるシミュレーション値を格納する記憶部と、数学モデルが実測値に一致するように第1の数学パラメータを探索しプラントモデルを用いてシミュレーションを行い数学モデルがシミュレーション値に一致するように第2の数学パラメータを探索する演算制御部とを備える。
(もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成する装置である。シミュレーションモデル作成手段は、対象の物理的な性質を考慮したシミュレーションモデルを作成する。第1の修正関数生成手段は、シミュレーションモデルに入力データを入力して得られる中間データを対応する実測データに近づける第1の修正関数を生成する。第1の補正手段は、中間データを第1の修正関数で補正する。第2の修正関数生成手段は、シミュレーションモデルに第1の補正手段により補正された中間データを入力して得られる出力データを対応する実測データに近づける第2の修正関数を生成する。第2の補正手段は、出力データを第2の修正関数で補正する。このようにすることで、出力データを実測データに精度良く近似させることができる。
(もっと読む)
プラントモデルのパラメータ調整装置
【課題】複数のパラメータを同時に調整し、パラメータ調整時間を短縮すると共にシミュレーションの精度向上が可能なプラントモデルのパラメータ調整装置を実現する。
【解決手段】プラントモデルのパラメータ調整装置において、表示部と、入力部と、ネットワークを介してプラントからの運転データを受信する通信部と、運転データ及びプラントモデルからの出力値を格納する記憶部と、運転データ及び出力値を用いて動的パラメータを調整する動的パラメータ調整機能と、静的パラメータを調整する静的パラメータ調整機能と、動的パラメータ及び静的パラメータを用いてシミュレーションを行い、出力値が予め設定された許容範囲内に入るまで調整及びシミュレーションを繰り返す運転データ追従機能とを有する演算制御部とを備える。
(もっと読む)
リアルタイムコントローラにおけるモデル予測制御のための方法及び装置
【課題】機械(30)への負荷を制御するための方法(300)及び装置を提供する。
【解決手段】本方法は、機械の予測モデルを使用して、プロセス変量と関係した制御出力値を予測周期にわたって実質的に一定に保持しながら、プロセス変量の最大値を決定する段階(304)と、決定したプロセス変量の最大値が許容限界範囲内にある場合には、制御出力値をインクリメントする段階(312)と、制御出力値を、プロセス値に許容範囲を越えることを引き起こさせなかった最終のプロセス変量値に設定する段階(318)とを含む。
(もっと読む)
閉ループ制御のチューニングの自動化
本発明は閉ループシステムのためのフィルタとループ比例ゲインを同時選択するための新規な装置、方法およびシステムに関するものである。本発明の1つの典型的な実施形態によれば、速度ループ補償器として知られるコントローラの一部を自動的に選択する方法が提供される。この方法は速度制御(例えばモータエンコーダ角)のフィードバックに使用されるセンサへの作動力(例えばモータトルク)からのダイナミック応答を表す周波数応答関数(FRF)に作用する。この周波数応答関数はそれぞれ対応する周波数値をもつ複素数の列として表すことができる。このチューニング方法は、安定余裕に関して規定された一連の基準を満たしつつループ比例ゲイン(Kp)の最大化を可能にするフィルタパラメータの組み合わせを決定する。積分ゲインと参照モデルを選択する方法も提示される。 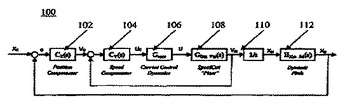 (もっと読む)
(もっと読む)
制御装置、制御パラメータの調整装置、制御パラメータの調整方法およびプログラム
【課題】システムに応じてより精度の高い制御特性が得られるようにするとともに、実運転と同様の条件で試運転を繰り返すことなく、初期の制御パラメータを決定できるようにする。
【解決手段】制御量の時系列データおよびPID制御パラメータを、状態ベクトルとしてパラメータ調整用データベース6に蓄積し、新たな状態ベクトルが与えられると、蓄積されたデータベース6の状態ベクトルに基づいて、局所モデルとして新たな状態ベクトルに対応するPID制御パラメータを生成してPID制御器3のPID制御パラメータを調整するとともに、制御誤差が小さくなるようにPID制御パラメータを修正してパラメータ調整用データベース6に蓄積し、初期のPID制御パラメータの調整は、JIT法による制御対象モデル2−1を用いたシミュレーションによって行なうようにしている。
(もっと読む)
121 - 140 / 176
[ Back to top ]