
Fターム[5H004GA30]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 設計の容易化 (176)
Fターム[5H004GA30]に分類される特許
161 - 176 / 176
ハプティックビジョンに基づく3次元物体モデル生成方法及びハプティックビジョンシステム

【課題】 実世界に充実なインタラクションを可能とするためのより適切な物体モデルを生成する。
【解決手段】 作用物体への作用が可能な対象物体(5)を仮想環境で再現するための物体モデルを、ハプティックビジョンシステムを用いて生成する方法であって、ビジョンロボット(2)によって、対象物体(5)を観測して当該対象物体(5)に関するデータを取得し、ハプティックロボット(3)を対象物体に接触させ、当該対象物体を作用物体に作用させるアクティブタッチステップ、ビジョンロボット(2)及びハプティックロボット(3)によって、アクティブタッチによる対象物体(5)の力学的作用特性に関するデータを取得し、 初期観測及び力学的作用特性観測によって取得されたデータに基づいて、対象物体の物体モデルを生成する。
(もっと読む)
システムの最適制御方法

【課題】エネルギ回生機能を有するシステムのエネルギ回生効果は、評価関数が2次形式でなくなるため、従来の最適制御理論を用いて最適制御則を求めることができなかった.またエネルギ回生評価項と性能評価項からなる評価関数を最小化するという認識がなかったため、制御則の導出は試行錯誤的に行われており、改善が望まれていた.
【解決手段】システムの方程式の一般解を部分積分し,その残余項をテイラー展開して1次近似する方法を用いて制御則を求め,これとReceding Horizon制御を組み合わせる方法を,エネルギ回生機能付きシステムの最適制御に適用し、従来の状態量フィードバック制御より優れた効果が得られることを明らかにした.
(もっと読む)
共線性を検出し、検証し、かつ修復するための方法と物品
【課題】
共線的なモデルを検出し、検証し、修復する系統的方法を提供する。
【解決手段】
モデル又はサブセットの共線性を検出後、当該共線性が非共線的であるかどうかを検証する方向性試験を行なう。次にモデルは、モデル不確定領域あるいは他の線形制約の条件下で、準共線的な状態から、完全に共線的か又はより非共線的か、いずれかの方向に調整される。このモデル調整に際して、原モデルとの偏差は最小化され、モデルの方向性は変わらない。 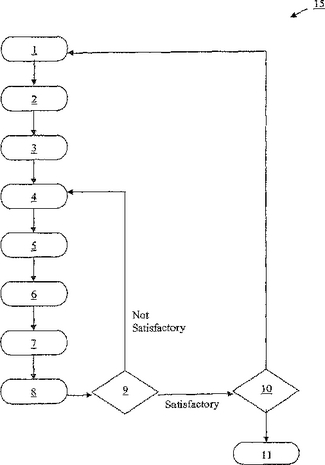 (もっと読む)
(もっと読む)
プラント運用制御装置
【課題】 プロセスモデルのパラメータを、季節の変動などによる経年変化やプラント機器の交換などによる対象プラントのプロセス構成の変化に対して適切に調整することができ、このことによりプラント機器に係る流量制御や水質制御等の制御性能を向上させることができるプラント運用制御装置を提供すること。
【解決手段】 プロセス状態計測手段12によりプロセス操作量およびプロセス状態量を計測し、これらのプロセス操作量およびプロセス状態量がプロセス状態記憶手段13に記憶される。ヒューマンインターフェース手段14において、ステップ応答開始時刻T1が入力されるとともにプロセス操作量目標値の設定を行う。モデルパラメータ同定手段15は、ステップ応答開始時刻T1に基づいて、記憶されたプロセス操作量のステップ状の変化からプロセスモデルのモデルパラメータK、T、Lの同定を行う。
(もっと読む)
電動機制御装置の制御パラメータ感度解析装置および電動機制御装置の制御パラメータ設定方法
【課題】 制御パラメータの設定具合により目標の周波数特性となるゲイン余裕や位相余裕を予測することが可能な電動機制御装置の制御パラメータ感度解析装置および電動機制御装置の制御パラメータ設定方法を提供する。
【解決手段】 電動機1または機械5からなる被検出体の動作量を検出する検出手段2と、指令信号を発生する指令器4と、指令信号を受けて電動機1を駆動する制御器3とからなる電動機制御装置において、制御器3の特性を含まない開ループ周波数応答特性を計測する開ループ周波数応答特性計測手段6と、電動機制御装置の制御器の制御器モデル23と、計測した開ループ周波数応答特性と制御器モデルから一巡開ループ周波数応答特性を算出する演算手段7と、制御器の制御パラメータと一巡開ループ周波数応答特性の変化の関係を感度解析する感度解析装置12を備えている。
(もっと読む)
非線形プロセス制御装置
【課題】非線形プロセスモデルを従来のPI制御系と有効に結び付けること。
【解決手段】PI(D)制御器によるプロセス量制御手段8と、前記プロセスの、非計測の外部入力およびプロセス状態を推定するプロセス状態/外部入力推定手段4と、プロセスの現在の状態を記録しておくプロセス状態記録手段5と、前記プロセス状態記録手段から供給されるプロセス状態およびプロセス外部入力に基づいて、プロセスの挙動を模擬するプロセスモデルによってプロセスゲインKとプロセス時定数Tを前記プロセス状態記録手段に記録された状態に応じて供給するプロセス定数供給手段6と、少なくとも前記プロセス定数供給手段によって供給されるプロセスゲインKとプロセス時定数Tを用いて、前記PI(D)制御器の比例ゲインKpと積分時間TIを決定する制御パラメータ決定手段7と、をそなえた。
(もっと読む)
モデルパラメータの自動フィッティング装置
【課題】 シミュレーションモデルパラメータを更新する際、プラントからの実測値に含まれる不適切なデータを除去して正確なパラメータの更新を行うモデルパラメータの自動フィッティング装置を提供すること。
【解決手段】 プラント挙動を模擬する数学的または物理的モデルのパラメータを調整するために使用するデータを記憶するデータ記憶手段3と、前記データ記憶手段から与えられる、プラント挙動を模擬する数学的または物理的モデルおよびそのパラメータを調整するために使用するデータから不適切なデータを除去するデータフィルタリング手段6と、前記データ記憶手段から前記閾値データフィルタリング手段を介して与えられるデータからプラント挙動を模擬する数学的または物理的モデルのパラメータを調整するパラメータ調整手段9と、前記パラメータ調整手段により調整された後のパラメータの入出力処理を行う入出力手段2,10とをそなえたことを特徴とするモデルパラメータフィッティング装置。
(もっと読む)
モデル予測制御装置及びモデル予測制御方法
【課題】 モデル予測制御を直接適用することが困難なシステムに対しても、モデル予測制御を適用すること。
【解決手段】 燃料電池スタックとその補機からなるシステムに対して、まず補機の目標値を大きく設定して(S1)、燃料電池スタックのモデルを用いて目標値を最適化する(S2)。次に、最適化された目標値を満足するように、補機のモデルを用いて補機の操作量を最適化する(S3)。さらに、最適化された補機の操作量から車両燃費を算出し、これを考慮して補機の操作量を再度最適化して、最適化された操作量を実機に与える。
(もっと読む)
システムモニタリングモデルの更新用システム、デバイス、及び方法
複数モニタリングモデルの更新用システム(102)が提供される。システムは、モニタリングされる複数システム(104a,104b,104c)の各々に対して、モニタリングされる特定システムと、複数推定モデルの少なくとも1つとの間の連関を決定するモデル連関モジュール(202)を有している。各推定モデルは、複数の別個のセットの推定プロパティの1つに基づいており、各セットは、特定の推定モデルに一義的に相応している。システムは、少なくとも1つの推定プロパティを更新し、更新された推定プロパティを各推定モデルに伝送する更新モジュール(204)を有しており、各推定モデルは、更新された少なくとも1つの推定プロパティを含む別個のセットに相応する。システムは更に、更新された少なくとも1つの推定プロパティを含む別個のセットに相応する各推定モデルを修正するモジュール修正モジュール(206)を含む。  (もっと読む)
(もっと読む)
モデルベース制御装置およびその設計方法
【課題】 入力と出力の間に無駄時間を含む制御対象を制御するモデルベース制御装置に関し、上記の制御対象を2自由度系制御により精度良く制御することを目的とする。
【解決手段】 無駄時間が存在しない場合に制御対象12の出力Yと入力Xの間に成立する関係を模擬した無駄時間無し逆モデルP'-1によりFFコントローラ20を構成する。上記入力Xと出力Yの間に現実に成立する伝達関数を模擬した無駄時間有り順モデルP'e-sTにより時間コントローラ24を構成する。制御対象12の出力目標値YTを無駄時間無し逆モデルP'-1に供給して、入力基本値XBを算出する。入力基本値XBを無駄時間有り順モデルP'e-sTに供給して出力予測値Y'を算出する。出力予測値Y'と実出力Yとの差ΔYが消滅するようにFB補正量ΔXを算出し、その値により入力Xを補正する。
(もっと読む)
伝達関数設定装置
【課題】 等しい極と零とを持たない伝達関数を一意に設定できるようにすること。
【解決手段】 行列Cの線形独立な列数が当該行列Cの列数と等しくなり、且つ、シルベスタ行列Dの線形独立な列数が当該シルベスタ行列Dの列数と等しくなるように、伝達関数G(z)の係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定するようにした。そのため、行列解析を行うことで、伝達関数G(z)に等しい極と零とを持たせない係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定することができる。それゆえ、例えば、行列Cの解析等で係数や次数を設定して伝達関数G(z)を設定した後に、その設定した伝達関数G(z)の極と零とを複素平面にプロットし、等しいと判断できる極と零とを恣意的に取り除かせる方法とは異なり、等しい極と零とを持たない伝達関数G(z)を一意に設定することができる。
(もっと読む)
電動機制御システムの自律設計方法
【課題】 機台振動を有する制御対象に対する位置指令と補償器のチューニング作業の時間を短縮する。
【解決手段】 電動機で駆動される装置を搭載した機台の振動を有する制御対象に対し、前記電動機の回転位置又は前記装置の可動部の位置に関する位置情報を用いて位置決め制御系を構成した電動機制御システムの自律設計方法において、前記可動部の特定の移動距離もしくは複数の移動距離に対して、(1)位置決め仕様を満足し、(2)機台振動抑制に関する制御目標を考慮し、(3)動作上の安全性を考慮し、(4)フィードバック補償器の安定性を確保したフィードフォワード補償器とフィードバック補償器と位置指令パラメータを最適化手法を用いて自律設計する。最適化手法として遺伝アルゴリズムを用いる。フイードバック補償器パラメータの探索範囲には、初期設定された又は出荷後に設定された安定化補償器パラメータが含まれるように設定する。
(もっと読む)
1次遅れ特性をもつ制御対象の制御方法
【課題】 本発明は、以下の優れた特長を有する、1次遅れ制御対象のための内部モデル制御器を用いた制御方法を提供する。1)フィードバック制御系の安定度を、自在に付与することができる。2)所期の安定度を最もコンパクトな制御器で確保できる。3)所期のループ帯域、速応性を簡単に付与できる。4)動作状態あるいは制御状態が変化する場合にも良好な制御性能を維持できる。
【解決手段】 内部モデル制御器2の分母多項式は複素平面の虚軸上あるいはこの近傍に少なくとも1個の零点を持ち、かつ、内部モデル制御器の分母多項式の最高次パラメータを1とするとき、内部モデル制御器の(次数+1)個のすべての分子多項式パラメータに個別的設計自由度をもたせることにより、課題を解決した。
(もっと読む)
産業プロセスのための最適制御問題を生成する方法
本発明は、産業プロセスのモデル化のための、ミクスト・ロジカル・ダイナミック(MLD)フレームワークの使用を単純化し、前記産業プロセスのための、最適制御問題及びスケジューリングへの適用を自動的に生成して解くことを可能にする。本発明のコアとなる技術的アスペクトは、任意に接続された二つのMLDブロックを自動的にマージすることによって、一つの複合MLDブロックを得ることにある。この手順を繰り返して使用することにより、産業プロセスの完全な記述を含む、いかなる複雑なシステムであっても、最も単純なMLDビルディング・ブロックから、生成することが可能になる。最適制御問題は、一義的なアウトプットが問題のコスト汎関数となるMLDブロックを付け加えることにより生成される。グラフィカルな環境において、いかなる特定の産業プロセスも、ベーシックなMLDエレメントまたはアトミックなMLDブロックのライブラリーからの例示するブロックにより、且つ、それらを適切に接続することにより、再現することが可能である。適切なライブラリーが利用可能なケースにおいては、上記のグラフィカルな相互接続を構築するための能力を除いては、このプロセスは、エンド・ユーザーに対して専門的な知識を要求しない。  (もっと読む)
(もっと読む)
技術的システムの運転方法
技術的システムの運転のための本発明に従う方法においては、時間間隔の間における運転パラメータの検出が行われ、その際この運転パラメータの時間的挙動から人口知能の方法により技術的システムの運転モード及び機能モード又はそのいずれか一方が確定される。 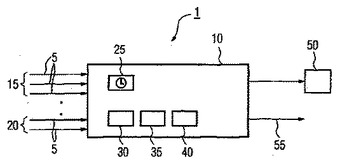 (もっと読む)
(もっと読む)
石油コンビナートの運転条件の推定方法
【課題】 線形計画法における目的関数の最適値を与える装置の運転条件を、高速に、安定して、かつ簡単に推定する石油コンビナートの運転条件の推定方法の提供。
【解決手段】石油コンビナートの運転条件の推定方法は、装置の異なる運転条件に応じた製品の収率を計算することにより、学習データを取得して、ニューラルネットワークモデルを生成する手順S2と、所定の目的関数が設定された線形計画モデルから入力される条件に基づいて、ニューラルネットワークモデルを用いて、該条件に応じた運転条件を探索して取得する手順S7と、得られた運転条件に基づいて、線形計画モデルに設定された目的関数の値を演算する手順S8と、得られた目的関数の値から、最適な運転条件であるか否かを判定する手順S9と、最適な運転条件でない場合、新たに変更された条件をニューラルネットワークモデルに入力する手順S11とを備えている。
(もっと読む)
161 - 176 / 176
[ Back to top ]