
Fターム[5H004GA30]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 設計の容易化 (176)
Fターム[5H004GA30]に分類される特許
41 - 60 / 176
プラントシミュレータおよびプラントシミュレーション方法

【課題】モデルパラメータ調整直後におけるシミュレーションのバランスを維持できるプラントシミュレータ等を提供する。
【解決手段】パラメータ調整手段は、モデルで使用されるモデルパラメータを、シミュレーションにより得られる第1のデータの値と、プラントにおける前記第1のデータの値とが一致するように調整する。偏差算出手段は、前記パラメータ調整手段による調整後、前記パラメータ調整手段による調整の対象とはならない第2のデータについて、前記シミュレーションにより得られる値と、前記プラントにおける値との間の偏差を算出する。トラッキング手段は、前記偏差算出手段により算出された前記偏差または当該偏差に応じた偏差を維持するように前記第2のデータをトラッキングする。
(もっと読む)
分散モデル同定

【課題】分散モデル同定に関して、局所的方法及び大域的方法の双方の利点を組み合わせるとともに、付加的な利益を提供する新たな方法を提供する。
【解決手段】分散モデル同定は、複数のブロックのそれぞれによって受信される値の置換信号値(sig)を生成する信号発生器を用いて複数のブロックの各入力ポートを増強することによりすべての信号リンクを弾性リンクに置き換えることによって達成することができる。その後、受信値と置換信号値との間の差分を計算して、弾性リンクの弾性を制御する補助信号として出力することができる。次に、パラメーターの大域的同定の代わりに、局所データに基づいてブロックパラメーターが局所的に同定される。同時に、補助出力信号はゼロにならざるを得ない。その結果として、発見された解は、大域的同定方法300の解ともなる。
(もっと読む)
プラントシミュレータ
【課題】現在使用している統計モデルが適切なモデルとして機能しているか否かをデータに基づいて評価し、必要な処置を講ずることを可能とするプラントシミュレータを実現する。
【解決手段】プラントデータを収集し、プラントの状態を物理モデルにより演算して第1推定値データを出力する物理モデル演算部と、前記第1推定値データを説明変数として入力すると共に、前記プラントの性状分析データを目標変数として入力し、統計モデルにより演算して第2推定値データを出力する統計モデル演算部とを具備するプラントシミュレータにおいて、
前記統計モデルに入力している前記第1推定値データに基づき、現在使用されている前記統計モデルの適正性を評価する統計モデル評価部を備える。
(もっと読む)
プロセス分析モデルと実際のプロセス動作とのオンライン整合
【課題】バッチモデルについて、オンラインバッチ処理の現在の動作状態に関する確かな決定を可能にするバッチモデルおよび分析システムを提供する。
【解決手段】単純で計算上安価な技法を使用して、進行中、現在実行中またはオンラインのバッチ処理から収集されたデータをバッチプロセス用に形成されたバッチモデルと整合させる。このデータ整合技法により、潜在構造射影(PLS)および主成分分析(PCA)技法といった他の統計処理技法がオンラインバッチデータに適用され、現在実行中のバッチの品質に関する分析が実行できるようになる。これらの分析が、ユーザがバッチモデルに基づいて現時点におけるバッチの品質、およびバッチランの終了時に所望のバッチ出力品質基準に達する可能性を決定できるようにする有用な情報を、バッチオペレータ等のユーザに提供する。
(もっと読む)
モデルの入力変数調整装置
【課題】部分的最小二乗法の利点を活かしながら、予測や診断に必要な入力変数を適切に選択して高性能な予測・診断モデルを構築する。
【解決手段】コンピュータシステムにより構成され、部分的最小二乗法モデルを構築するための入力変数及び出力変数の実績値のセットからなるデータが蓄積されたデータベース20と、前記データが入力される演算制御装置100と、を備え、この演算制御装置100は、学習データを作成する機能1、この学習データを用いて部分的最小二乗法によりモデルを構築する機能2、及び、機能2により構築したモデルの入力変数の数を順次削除したときの統計指標に基づいてモデルの入力変数を適切な数に調整する機能3を有するモデル構築手段120と、構築されたモデルを用いて予測処理を行う予測・診断手段130と、を有する
(もっと読む)
プログラム、記録媒体、サーボモータの制御パラメータ調整方法、開発支援装置、サーボシステムの開発システム
【課題】サーボモータを制御するサーボドライバのパラメータを容易に調整可能な技術を提供する。
【解決手段】ユーザは、自身の利用する装置を開発支援装置の画面上で選択する。選択された装置(機械構成)と剛性値とが関連付けられる。さらに剛性値とサーボドライバの制御パラメータとが対応付けられる。完了条件を満たすように、制御パラメータが自動的に調整される。したがって、ユーザが自身の利用する装置を選択するだけで、サーボドライバのパラメータを自動的に調整することができる。
(もっと読む)
PIDパラメータ調整支援装置および方法
【課題】ユーザがPIDパラメータ調整の行き詰まりに至る確率を低減する。
【解決手段】PIDパラメータ調整支援装置は、知識型の調整手法を実行してPIDパラメータの推奨値を探索する知識型調整部20と、分析型の調整手法を実行してPIDパラメータの推奨値を探索する分析型調整部21と、知識型調整部20と分析型調整部21とによるPIDパラメータの推奨値を提示する調整情報提示部3とを備える。
(もっと読む)
較正方法、較正システム、およびこの較正方法のための記録媒体
【課題】 単純かつ短時間に、物理システムの状態変数のオブザーバの係数を較正する方法を提供する。
【解決手段】 この方法は、状態変数xkの関数である物理システムの変数zkを、相異なるN個の測定時刻において測定するステップ(50)と、あらかじめ定められた制約セットΔを満たしながら、基準式を最小にする係数ベクトルpを特定するステップ(54)とを含んでいる。この基準式は、変数zkと、変数zkの推定値に状態変数xkの推定値をリンクさせる既知関数との差のノルムによって構成されている。制約セットΔの1つまたは複数の制約は、変数zkの軌跡が、測定時刻kの少なくとも大部分において、変数zkの推定値の軌跡の両側に配置された、帯状の不確かさの領域の内部に存在しなければならないということを命ずる。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
最適化シミュレーションプログラムおよび最適化シミュレーション装置
【課題】
目標値と目標値の重みをキーボードから入力する必要が無く、局所解からの脱出を容易にし、パラメーターの入力による計算結果のグラフ表示・グラフの変形による最適化結果のパラメーター表示の双方向オペレーションを可能にする最適化シミュレーション技術を提供する。
【解決手段】
初期パラメーターに基づきプログラムは関数の計算をおこない、計算結果をグラフ表示する。プログラムは、ユーザーがグラフをマウスなどのポインティング装置を用いて所望の形状に近づくように変形させることができる機能を持つ。さらにマウスカーソルがグラフのデーター点を通過した回数に応じて最適化に使用する重みを増やす機能を持つ。プログラムは、変形されたグラフのデーター点を目標値として、最適化手法を用いてパラメーターを最適化する。最適化後のパラメーターを初期パラメーターとして上記手順を繰り返し、所望の目標値に近づけていく。
(もっと読む)
プロセス制御システム
【課題】制御ノウハウに相当する制御ロジックを自動的に作成すると共に、今制御ロジックがどのように動作するかを確認することができるプロセス制御システムを提供する。
【解決手段】プラント10のプロセスを制御するプロセスコントローラ21に対し、プロセスを制御するための、各種の状態信号や測定値、制御目標値、及び制御量を含むプロセスデータを蓄積するデータ保存部32を設け、この蓄積されたプロセスデータから、プロセスの状態量に対する制御目標値を満足する制御量及び制御結果に関するデータを用い、制御ロジック作成装置31で、これらデータ相互の関係から制御ノウハウに相当する好適な制御ロジックを作成する。作成された制御ロジックは、制御シミュレーション機能33、プロセスシミュレーション機能34を有するシミュレータ35でシミュレートし、検証された制御ロジックがプロセスコントローラ21の制御ロジックとして適用される。
(もっと読む)
プロセスモデルの高速同定および生成
【課題】プロセスモデルの高速同定および生成を提供する。
【解決手段】高速プロセスモデル同定技術は、比較的短期間でプロセス出力の初期応答からプロセス入力の変化までの積分ゲイン及びプロセス無駄時間の推定値を構築することで、プロセス入力とプロセス出力との間の動的関係を同定する。積分ゲインおよび無駄時間値が、多くの異なる種類のプロセスのいずれかに対して完全なプロセスモデルを生成するために使用される。これらプロセスモデルは、プロセスシミュレーションを実行するために非常に高速で使用することができるか又は制御目的で使用することができ、プロセスモデルを使用するかそれに依存するプロセス制御システムを従来よりもはるかに高速でオンライン化することができる。さらに、高速モデリング技術を使用したプロセスループを制御する制御装置が、低速プロセスの制御を実行する上で非常に有用である。
(もっと読む)
PID調整支援装置および方法
【課題】過剰な精度追求の可能性を低減する。
【解決手段】PID調整支援装置は、ユーザが制御対象のモデリングの目標量データに対して認識している認識誤差範囲を予め記憶する認識誤差範囲記憶部10と、目標量データと制御対象モデルに基づいて算出された制御応答波形であるモデル応答波形とをモデリング結果として表示部12にグラフ表示させる共に、認識誤差範囲記憶部10に記憶された認識誤差範囲をモデリング結果と重ね合わせて表示させる表示処理部11とを備える。
(もっと読む)
適応ノッチフィルタ及びそれを用いた共振抑制装置
【課題】小さい演算負荷で自動的に中心周波数を更新することができる適応ノッチフィルタ及びそれを用いた共振抑制装置を提供する。
【解決手段】適応ノッチフィルタ10は、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するよう構成されており、中心周波数を変更可能であるノッチフィルタ12と、入力信号の周波数と中心周波数の現在値との大小関係に対応する位相特性を有し、制御入力を生成するための信号を入力信号とする位相差フィルタ16と、大小関係に応じて中心周波数修正量の平均値の符号が決定されるように位相差フィルタ16の入力信号及び出力信号を用いて定義された中心周波数修正量を演算し、該中心周波数修正量に基づき中心周波数を更新する修正演算部18と、を備える。
(もっと読む)
連続システムをマルコフ決定過程に変換するための方法
【課題】最適な制御シーケンスをMDF及び連続状態空間システムについて見つけることができるように、所与の連続状態空間動的システムを離散状態空間を有するマルコフ決定過程(MDF)に変換する。
【解決手段】連続動的システムが、離散状態を有するマルコフ決定過程に変換される。連続システムの所定の数の連続状態が選択される。各連続状態は、MDPの1つの離散状態に対応する。ドローネ三角形分割が連続状態に適用されて、一組の三角形が作成される。各三角形の頂点は連続状態を表す。各離散状態について、次の離散状態y=f(x,a)が求められる。xは、その離散状態に対応する連続状態を表し、aは制御動作であり、fは、連続状態の非線形遷移関数である。次の離散状態yを含む特定の三角形が識別され、次の離散状態yは、その特定の三角形の頂点によって表された連続状態xに対応する離散状態に遷移する確率として表される。
(もっと読む)
制御装置のための機能パラメータを定める方法
本発明は、制御装置(22)のための機能パラメータ(20)を定める方法と、提示される方法が実施される制御装置(22)と、に関する。制御装置(22)は、技術システム(10)の制御のために設けられ、本方法では、少なくとも1つの目標変数がシステム挙動に対して予め設定され、機能パラメータ(20)の変更が実行され、機能パラメータ(20)に対する獲得された応答から、設定されたパラメータ(20)の評価が、予め設定された少なくとも1つの目標変数を考慮して実行される。 (もっと読む)
モデリング・システムの処理システム、方法及びプログラム
【課題】設計のためのモデリング・ツールにおいて、定量基準によりシステム表現の簡略化可能部分を自動判別する。
【解決手段】SysMLのブロックから数式が抽出され、または、Simulink(R)のブロック線図が微分方程式に変換され、その係数は、級数展開される。先ず、微分方程式を、CASにより通常どおり解きその解も、好適には級数展開される。次に、区間解析の技法により、区間係数として、CASによって微分方程式を含む数式を解く。区間解析の結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数を0にして、CASによって微分方程式を含む数式を解く。そこで再度、結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数の項を微分方程式から落とし、微分方程式を簡易化する。
(もっと読む)
外科システムにおける適応フィードフォワード制御の方法
いくつかの実施形態においては、システムコンポーネントを制御するフィードフォワードを用いる方法は、フィードフォワード項がフィードフォワードテーブルにおいて受信された動作セットポイントに存在する否かを判断するステップを備え得る。フィードフォワード項が存在していない場合、システムコンポーネントは、求められるセットポイントの第一の許容値の範囲内にシステムを移行されるまでインクリメントされ得る。いくつかの実施形態においては、定常状態エラー量が決定され、第二の許容値と比較され得る。いくつかの実施形態においては、フィードフォワード項が動作セットポイントに存在している場合、システムコンポーネントは、フィードフォワード項に対応するコントローラ出力を用いて制御され得る。フィードフォワード量に対して起こり得る変化に関連する、システムに対する変化が検出されたとき、新たなフィードフォワード量が、フィードフォワードテーブル用に生成され得る。 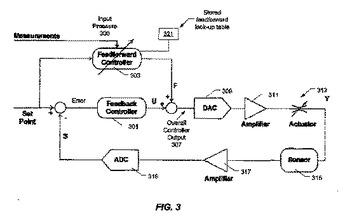 (もっと読む)
(もっと読む)
シミュレーション方法、システム、及びプログラム
【課題】シミュレーションの不安定性を回避する。
【解決手段】シミュレーション・システムは、動作シナリオに沿って、1つの状態から別の状態に遷移する際に、今から移行する状態が未踏である場合に、未踏であることを示すソフトウェア的なガード1202を置き、未踏のガードに遭遇することに応答して、今から移行する状態が安定かどうかのテストを行う。このテストの結果、今から移行する状態が安定であると判定すると、シミュレーション・システムは、未踏のガードを外す。そうして、その先の状態の遷移箇所に別の未踏のガードを配置する。一方、今から移行する状態が不安定であると判定すると、シミュレーション・システムは、未踏のガードを不安定のガード1204に取り替える。そして、遷移の出現状態を記録して、好適にはシミュレーションを終了する。
(もっと読む)
先進的プロセス制御(advancedprocesscontrol)と実時間最適化(real−timeoptimization)との経済性に基づく協調
先進的プロセス制御と製造プロセスの実時間最適化とを協調させるためのシステムおよび方法が、提供される。システムおよび方法は、制御され最適化されるべき製造プロセスに対応するプロセスデータおよび経済的データを受け取る。プロセスデータ、経済的データおよびプロセスの非線形定常状態モデルに基づいて、経済的目的関数が、実時間最適化モジュールによって計算される。その後、引き下げられた次数の、経済的目的関数の非線形近似が、実時間最適化モジュールによって計算され、先進的プロセス制御モジュールに送られる。先進的プロセス制御モジュールは、制約された経済最適に向けて製造プロセスを制御するために、引き下げられた次数の、経済的目的関数の非線形近似を使用する。 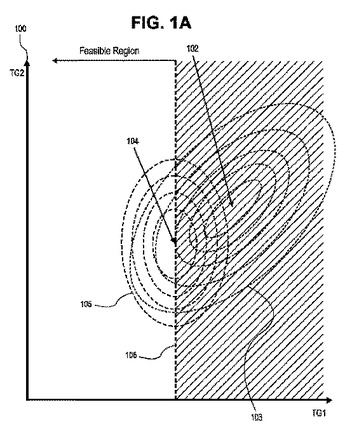 (もっと読む)
(もっと読む)
41 - 60 / 176
[ Back to top ]