
Fターム[5H004GA30]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 設計の容易化 (176)
Fターム[5H004GA30]に分類される特許
61 - 80 / 176
PID制御装置及びPID制御方法
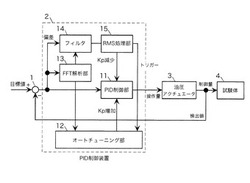
【課題】高速応答が求められる制御システムにおいて、PIDパラメータを自動設定する。
【解決手段】PID制御部11をP制御状態とし、目標値入力を一定とした状態で、オートチューニング部12はPID制御部11の比例ゲインKpを徐々に増大させる。Kpの増大に伴い、偏差に振動が発生する。FFT解析部13は偏差を周波数解析して振動の周波数を検出する。フィルタ14は偏差から振動周波数の成分を抽出しRMS処理部15に出力する。RMS処理部15は偏差の振動の1周期ごとに実効値を算出し、複数周期連続して増加していることを検出したときに、オートチューニング部12にトリガー信号を送出し、PID制御部11のKpの値を下げる。オートチューニング部12はトリガー信号を受信すると、そのときの比例ゲインKpc及び固有振動の周期TcからPIDパラメータを決定する。
(もっと読む)
電動機の制御装置

【課題】簡単な調整によって負荷機械に応じた適切な制御パラメータを得ることができ、多種多様な負荷機械を高精度かつ安定に運転可能とした電動機の制御装置を提供する。
【解決手段】電動機16により駆動される負荷機械20の位置が位置指令に一致するように電動機16を制御する制御装置であって、位置制御部12、速度制御部13及び電流制御部16を有する制御装置において、実現したい応答の速さを示す応答性設定信号と負荷機械種別判別信号とに基づいて、位置制御部12、速度制御部13及び電流制御部16にて使用する制御パラメータを自動的に演算する制御パラメータ設定手段23を備え、この制御パラメータ設定手段23における制御パラメータの演算アルゴリズムを、前記負荷機械種別判別信号に応じて変更する。
(もっと読む)
技術システムの制御および/または調整をコンピュータ支援により学習する方法
【課題】学習の際に使用されるトレーニングデータの統計的不確定性を考慮し、同時にメモリスペース需要と計算時間に関して効率的な、技術システムの閉ループ制御および/または開ループ制御の学習方法を提供する。
【解決手段】技術システムの運転中の求められた、状態、活動および連続状態を含むトレーニングデータに基づいて、品質関数と活動選択ルールを学習するステップ;品質関数および活動選択ルールの学習中に、品質関数の統計的不確定性に対する尺度を、不確定性伝播によって求めるステップ;該統計的不確定性に対する尺度と、品質関数への統計的に緩和された要求に相当する確率パラメータとに基づいて、モデル化された品質関数を決定するステップ;モデル化された品質関数に基づいて、活動選択ルールを学習するステップ。
(もっと読む)
プラントモデル作成システムおよびプラントモデル作成方法
【課題】従来のソフトウエアのソースコードを用いて従来よりもわかりやすく保守しやすいプラントモデルを正確かつ効率的に再構築する。
【解決手段】プラントモデル作成システム10は、ソフトウエアのソースコードから変数の種類を判定する入出力抽出処理部21、サブプログラム間の参照をローカル変数で行うサブプログラムを生成する引数化処理部23、サブプログラムのプログラム構成ツリーと変数の入出力関係表を生成する接続関係情報抽出処理部22、プログラム構成ツリー、入出力関係表および部品データを参照してソフトウエア部品を配置して結線する部品群配置結線処理部25、結線後のモデルプログラムのプログラムについてソースコードを生成するプログラムソースコード生成処理部26およびプログラムを計算し評価する計算評価部27を備えたソフトウエア部品再構築処理手段14を具備する。
(もっと読む)
制御装置のパラメータ調整法
【課題】特性が変動する制御対象のモデルを制御系に組み込み、最適化手法を用いて制御演算パラメータを調整する方法を提供する。
【解決手段】制御対象の特性の標準値に基づく位置決め制御演算に、制御対象の特性変動を模擬する定数倍の演算を追加し、制御対象の特性の標準値と変動した特性の値との比を、前記追加した定数倍の演算の定数として設定し、前記定数倍の演算の定数が設定された位置決め制御演算において、所定の評価関数の値を収束させる制御パラメータを、最適化手法を用いて求める。
(もっと読む)
訓練制御装置
【課題】出力が所定値に到達しやすいよう目標値を漸次修正していくエキスパート制御法を制御対象の訓練目的で実現するため,それぞれ適切な信号処理および信号変換手段と訓練インターバル毎の目標値設定手段と目標値を修正し混合する手段と制御偏差を削減し整定時間と立上り時間を縮める学習制御手段を提供する。
【解決手段】1)振幅一定で可変角速度周期信号のパルス幅変換を行う手段2)上記パルス信号と訓練インターバル信号から訓練インターバル毎のステップ信号を得る手段3)訓練インターバル毎に訓練目標値を与える手段4)訓練インターバル毎に開ループトレーナ目標値に近づいていく訓練目標値を生成する手段5)開ループトレーナ目標値に閉ループトレーナ目標値をオーバーライドさせてトレーナ目標値を生成する手段6)制御偏差もしくは変換制御偏差が減少するように学習制御を行う手段7)入力されるステップ幅に応じて振動周期が変化する手段。
(もっと読む)
システム同定方法及びシステム同定装置
【課題】 誤った推定を与えないM系列信号を生成してシステム同定を行うシステム同定方法及びシステム同定装置を提供する。
【解決手段】 第1のサンプリング周期T1、及び、第1のシフトレジスタ数n1で特徴付けられる第1のM系列信号と、第1のサンプリング周期T1と異なる第2のサンプリング周期T2、及び、第2のシフトレジスタ数n2で特徴付けられる第2のM系列信号とを合成して第3のM系列信号を生成し、これを入力信号としてシステム同定を行う。
(もっと読む)
機械装置の制御装置及び機械装置の特性同定方法
【課題】 モータに動力伝達部を介して被駆動部を機械的に結合したものを制御対象とするような機械装置への適用に適し、機械装置における摩擦や装置の自重のような外乱が存在しても精度良く装置特性を同定して駆動制御を実行することのできる制御装置を提供する。
【解決手段】 制御装置は、トルク指令値τMを受けるモータ10と被駆動部11との間を動力伝達部12で連結した慣性共振系を制御対象とし、該制御対象の状態量としてモータ軸角速度ωMを計測する計測手段と、前記モータ、動力伝達部、被駆動部に起因する外乱トルクを推定する外乱オブザーバ17と、推定された外乱トルクを前記トルク指令値から減算する減算部18と、前記減算部の出力及び前記モータ軸角速度ωMに基づいて前記制御対象のパラメータを同定する制御対象特性同定器15を含み、同定されたパラメータに基づいて前記トルク指令値を調整する。
(もっと読む)
スライディングモード制御系の設計方法及びその設計支援装置
【課題】スライディングモード制御系の簡易な設計方法を提供すること。
【解決手段】等価制御入力(u1)を算出する等価制御器(11)、切換関数(σ)の値に比例した制御入力(u2)を算出する比例到達制御器(13)、切換関数(σ)に基づいて決定され制御対象の状態に対して非線形な制御入力(u3)を算出する非線形制御器(14)、並びに、三つの制御入力(u1、u2、u3)を加算して制御入力(u)を算出する加算器(15)を備えたスライディングモード制御系(10)の設計方法は、制御対象を線形制御系で制御する場合の状態フィードバックゲイン(Fc)を算出するステップ、及び、状態フィードバックゲイン(Fc)によって導出される制御入力が制御入力(u1)と制御入力(u2)との合計に等しいものとして等価制御器(11)及び比例到達制御器(13)を設計する設計ステップ、で構成される。
(もっと読む)
シミュレーション評価システム
【課題】シミュレーションにより得られるプラントの動的挙動の予測を適切に評価ことを可能とする。
【解決手段】実プラントから取得した実データによりシミュレーションモデルのパラメータを修正するプロセスシミュレーション部からのデータに基づき、シミュレーション結果を評価するシミュレーション評価システムにおいて、規定された時間分の予測データを出力する定期予測シミュレーション部と、現在値及び予測データを入力し、この予測データを所定条件でグループ化したラベリング情報を出力すると共に、状態の変化が所定値を超えたときに解析実行メッセージを出力する状態判別部と、予測データ並びにラベリング情報及び現在値を保存するシミュレーションデータベースと、解析実行メッセージを入力したとき、保存されている予測データ、ラベリング情報、現在値を取得して予測データに対する解析を実行し、解析結果を出力する予測データ解析部とを備える。
(もっと読む)
連続的にスケジュールされるモデルパラメータに基づく適応制御装置
【課題】制御装置の調整パラメータを進行するために使用される連続的にスケジュールされるプロセスモデルパラメータを決定する適応プロセス制御装置を提供する。
【解決手段】状態に基づく適応PID制御装置は、プラントの種々の稼動領域における適応調整を実行するために使用される、適切なプロセスモデルを決定するための新しい技術を使用し、特に、当該の種々のプラント稼動領域または点において連続的にスケジュールされるプロセスモデルパラメータの更新を可能にする、プロセスモデルパラメータ決定技術を使用する。この連続的にスケジュールされるプロセスモデルパラメータ更新方法の使用により、プロセスの稼動領域または稼動点における変更に基づいて実行される適応調整手順中に、当該PID制御装置で使用される調整パラメータ間でのより円滑な遷移が実現されるため、全体的な制御が向上する。
(もっと読む)
入力変数選択支援装置
【課題】簡便な方法により入力候補変数から入力変数を絞り込むための指標を提示し、入力変数選択の支援を行う入力変数選択支援装置を提供する。
【解決手段】平均値が0であり標準偏差が1となるように標準化されたモデル情報データを用いて、全入力候補変数と出力変数の関係を表す複数の入出力モデル[j](j=1,・・・,JであってJは2以上の自然数)を、モデル原理を異ならせて多形式にわたり生成し、各入出力モデル[j]の各入力候補変数に対する出力変数の絶対値である感度を生成する感度生成を各入出力モデル[j]についてそれぞれ行い、各入出力モデルの感度に基づいて入力変数を選択提示する。
(もっと読む)
制御及び推定のための線形モデルのリアルタイムスケジューリング
【課題】制御及び推定のための線形モデルのリアルタイムスケジューリングを提供する。
【解決手段】選択した動作点におけるまたは所望のデータからの関心対象の物理的システムの非線形算定モデルの線形化によって関心対象の物理的システムに関する1組の線形モデルをオフライン決定し(12)、線形モデルの残留組を提供するために各線形モデルの正確性をオフライン解析し不正確な線形モデルをこれから排除し(14)、該線形モデルの残留組に基づいて1つまたは複数のルックアップテーブルの格子点に対応する線形モデルをオフライン作成し(19)、ルックアップテーブル格子点を選択したスケジューリング変数とオフラインで関連付けし(19)、オフライン作成された物理的システムに関する線形モデルによって線形モデルのオンラインスケジューリングに関する原則が形成されるように、物理的システムに関するアルゴリズム型ソフトウェアをそこから作成する。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 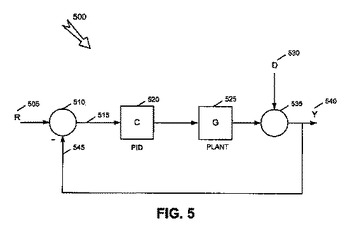 (もっと読む)
(もっと読む)
多変数プロセス制御においてモデルの品質を推定しモデルを適応させる装置およびその方法
【課題】少ないデータ要求で、かつ、プロセスの通常操業の障害となることなく、プロセスの動的モデルを審査・更新する装置およびその方法を提供する。
【解決手段】本発明の動的モデルの審査・更新装置およびその方法は、開始モデルとして制御器の既存のモデルを用いて試験器を構成し、プロセス変数に摂動を加え、データを収集してスライスし、モデル品質の推定により不良サブモデルを同定し、不良サブモデルに関係するプロセス変数にさらなる摂動を加えることで不良サブモデルを再同定し、この新たに同定したサブモデルで制御器をオンラインで更新する。更新により、制御器に改良モデルが得られる。
(もっと読む)
パラメータ調整方法及び装置
【課題】実プラントの特性を精度よく模擬するダイナミックシミュレータを作成することが出来るパラメータ調整装置を提供する。
【解決手段】プラントの複数の制御量と、プラントの運転から与えられる複数の操作量とから、前記操作量の投与の結果として得られる制御量を数学的モデルで演算するダイナミックシミュレータ11と、実プラント20で与えた操作量に関連して実測された制御量の実測値と、ダイナミックシミュレータ11に実操作量を入力して求めた演算値との偏差が小さくなるように、ダイナミックシミュレータ内のパラメータを調整するパラメータ演算装置14とを備える。
(もっと読む)
PID調整装置およびPID調整プログラム
【課題】PID調節器の調整方法等に関して、広く現場のエンジニアに普及させることが可能となり、且つ調整労力と時間とを著しく短縮できるPID調整装置30等を提供する。
【解決手段】伝達関数パラメータ取得部32は、制御対象10に入力する操作量MVの時系列データと操作量MVに応じて制御対象10から出力される制御量PVの時系列データとに基づき制御対象10を表現する複数の伝達関数のパラメータを求める。適合性取得部34は当該パラメータを有する各伝達関数が出力した推定制御量と実際の制御量との適合率を求める。最良伝達関数選択部36は当該適合率に基づき、最良の適合性を有する伝達関数を選択する。最適PIDパラメータ探索部38は、選択された伝達関数11等を対象として設定値SVに対する設定値応答及び外乱dに対する外乱応答の結果から予め決めておいた評価指標を満たすようにPID調節器20のPIDパラメータを探索する。
(もっと読む)
PID制御装置
【課題】 制御量が周期的な変動を呈している積分プロセスにおいて、制御対象に同定用信号を与えることなく、PID制御器のチューニングを可能とする。
【解決手段】 制御対象12に操作端14から加える操作量と、検出器15で検出される制御量から、周期解析手段31で周期を求める。積分特性算出手段である簡易積分器32で積分ゲインが求められ、プロセスモデル30が生成される。制御モデル20、制御モデルのPIDパラメータを調整する評価器21と併せて制御シミュレータ16を構成し、シミュレーションによって最適なPIDパラメータを算出する。算出した制御モデルのPIDパラメータを、プロセスの要求に合わせて微調整し、制御器13の制御パラメータとして設定することができる。
(もっと読む)
シミュレーションシステム
【課題】過去に設定されたモデルパラメータを効率よく再利用できるシミュレーションシステムを実現すること。
【解決手段】実際のシミュレーション対象に入力されたデータに基づきシミュレーションを実行しながら、前記シミュレーション対象の出力と前記シミュレーションの結果が一致するようにパラメータを調整するシミュレーションシステムにおいて、前記シミュレーションの結果を保存するシミュレーション結果データベースと、前記シミュレーション時に設定した前記パラメータの履歴を保存するパラメータ履歴データベースと、このパラメータ履歴データベースから前記シミュレーション対象の出力値に対応するモデルパラメータについて前記シミュレーションをした結果と前記シミュレーション対象の出力一致度を時系列的に計算する適合率計算部とを有することを特徴とするもの。
(もっと読む)
シミュレーション装置及びシミュレーション方法
【課題】制御装置で実行されるタスクの実行周期がモデル演算周期よりも短い場合であっても、シミュレーションの精度を向上させ、適切な信号値を制御装置に出力できるシミュレーション装置を提供する。
【解決手段】制御対象を模擬して制御対象の状態値を算出するモデル演算を所定のモデル演算周期で繰返すモデル演算部2と、前記モデル演算部2で算出された状態値を信号値に変換して制御装置7に出力する信号出力部4を備えているシミュレーション装置1であって、前記モデル演算部2により状態値が更新されるまでの間、過去の状態値に基づいて状態値を補正する状態値補正部51cを備え、前記信号出力部4は、前記状態値補正部51cにより算出された補正状態値を信号値に変換して前記制御装置7に出力するシミュレーション装置1。
(もっと読む)
61 - 80 / 176
[ Back to top ]