
Fターム[5H004GA30]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 設計の容易化 (176)
Fターム[5H004GA30]に分類される特許
21 - 40 / 176
制御装置
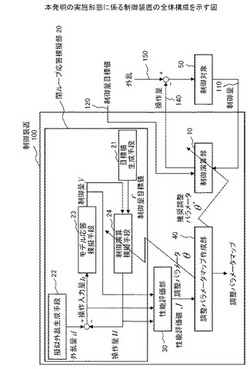
【課題】制御対象モデルが非線形であったり、従来の制御モデルで表現できなかったりする場合においても、制御対象とそれを制御する制御器のフィードバック結合の応答特性を調整することができる制御装置を提供する。
【解決手段】制御装置100の中に制御対象モデルと制御演算を模擬する閉ループ応答模擬部20が設けられる。そして閉ループ応答模擬部20に、調整パラメータと制御性能評価を関連付けるマップを作成する機能をもたせる。こうすることで、制御対象50が非線形性を含む場合などで、従来の線形制御理論がそのまま適用できないケースであっても、適切に制御演算部10における調整パラメータを調整することができる。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム

【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
プロセス制御システムにおける統合されたアドバンスド制御ブロック
【課題】モデル予測制御のような多入力/多出力制御を実行するアドバンスド制御ブロックを提供する。
【解決手段】アドバンスド制御ブロック56は、汎用制御論理102を有し、プロセス出力および入力に通信可能に接続された制御入力および出力とを有する初期機能制御ブロックを作成することで形成が開始される。制御ブロック内の波形ジェネレータ101は、プロセスモデル104を作成する際に用いられるように設計された励起波形を用いて制御ブロック出力によってプロセス入力の各々を体系的にアップセットする。データ収集ルーチン100は、プロセス入力各々の波形にたいするプロセス出力各々の応答を示すデータを収集する。収集されたデータからプロセスモデルを生成し、プロセスモデルから制御論理パラメータを作成する。制御論理パラメータおよびプロセスモデルは制御ブロックにダウンロードされ、アドバンスド制御ブロックの形成を完了する。
(もっと読む)
データ収集装置およびデータ収集方法
【課題】制御量と操作量の整定状態を検出して、制御対象のモデリングのためのデータ収集を実行する。
【解決手段】データ収集装置は、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、制御量の挙動を計測する整定判定条件検出部2と、操作量上限値が出力される時間と操作量下限値が出力される時間を計測する出力時間計測部3と、AT実行中の平均操作量を算出して整定操作量とし、AT実行時の操作量切換点となる制御量を整定制御量とする整定状態推定部4と、AT終了後、整定操作量を出力する出力維持部5と、制御量が整定制御量の近傍にある継続時間が、特定時間以上になった場合に、整定状態になったと判定する整定状態検出部6と、整定状態が検出されたときに、制御対象のモデリングのためのデータ収集を実行するデータ収集実行部7とを備える。
(もっと読む)
タイムラインに基づく半順序プランニングの枠組み
【課題】計画がタイムラインの集合として形成された複数のタイムラインの形式で作成される環境における変数を表す、オンライン半順序プランニングシステムおよび方法を提供する。
【解決手段】開始点において、タイムラインの集合は、一貫性のないタイムラインの集合であり、システムおよび方法は、タイムラインの集合が一貫性を持つまで、タイムラインを体系的に改良する。
(もっと読む)
データ抽出装置及びデータ抽出方法
【課題】オペレータの負担なく、シミュレーションモデルのファインチューニングに適した実測データを容易に抽出できるデータ抽出装置及びデータ抽出方法を提供する。
【解決手段】 プラントの運転状況を予測してプラントの制御を行うシミュレーションモデルであって、前記シミュレーションモデルに入力する実測データのデータ抽出装置10において、特徴解析手段104は、プラントから取得した複数の実測データの時系列データの形状特性と、シミュレーションモデルから出力された状態量のシミュレーションデータの時系列データの形状特性を解析する。抽出手段106は、特徴解析手段104による解析の結果、シミュレーションデータの形状特性と最も類似する実測データを実測データベースから抽出する。
(もっと読む)
適応制御装置の設計方法
【課題】安定したプロセス制御を実現する適応制御装置の設計を速やかに行うことのできる適応制御装置の設計方法を提供することを目的とする。
【解決手段】プラント1、PI制御器3、適応制御器5の伝達関数を与える第1工程と、PI制御器3と適応制御器5とを合わせた制御系全体の伝達関数を求める第2工程と、制御対象の入力側に制御系外部から与えられる外乱を想定したときに、該外乱から出力までの伝達関数を、制御系全体の伝達関数とプラント1の伝達関数とを用いて表現する第3工程と、規範モデルを設定する第4工程と、規範モデルと第3工程で求めた伝達関数とによる部分モデルマッチングにより、PI制御器3における比例ゲイン及び積分ゲイン並びに適応制御器5の時定数を決定する第5工程とを有する適応制御装置の設計方法を提供する。
(もっと読む)
エネルギー変換機器のシミュレーション方法及びエネルギー変換機器のシミュレーションシステム
【課題】エネルギー変換機器を選択し、その動作をシミュレートし、最適な機器、最適な制御の選定を可能とする。
【解決手段】シミュレーション装置は、入力部11で、顧客のニーズをニーズ一覧表31から選定し、機器選択部12では外来業者と交信して充実、最新にしている、機器データ記憶部32の機器データを参照しながら機器を選択し、プログラム選択部13では類似機器で類似な制御を行っている場所制御装置7,70と交信して、充実、最新にしている制御プログラム記憶部33の制御プログラムから選定し、シミュレーション部14では選定された制御プログラムにしたがって、機器データと、制御プログラム記憶部33に記憶されている計算式を参照しながらシミュレーションを実施する。条件、プログラムを取替えながら複数回のシミュレーションを実施して最適な機器、制御を選定する。
(もっと読む)
デジタル制御装置の設計方法および設計装置
【課題】マルチレートデジタル制御装置を簡易な構成で設計する。
【解決手段】本発明にかかるデジタル制御装置の設計方法は、低レートで動作する低レート補償器と、前記低レート補償器の出力を高レートに変換するレート変換器と、高レートで動作する高レート補償器とを得る取得ステップと、前記高レート補償器をポリフェーズ分解し、該ポリフェーズ分解に対してノーブル恒等変換を用いて、第2の低レート補償器とレート変換器から構成される低レート構成に変換する変換ステップと、を含む。記変換ステップでは、前記高レート補償器のインパルス応答を求めてFIR形フィルタに変換した後に、ポリフェーズ分解を施す、ことも好ましい。
(もっと読む)
スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム
【課題】 プラントにおいて、スライディング・モード制御を適用すべきかどうかを、必要最小限の計測実験データから自動判別すること。
【解決手段】 システムは先ず、プラントを、オープン制御的に計測し、その計測データを用いて、既存のシステム同定手法と次数決定法により、プラントの状態方程式を記述する。スライディング・モード制御の切換超平面を設計する。次に、超平面に拘束された時の線形モデルの制御入力のみを用いた場合の出力と、スライディング・モードの制御入力を用いた場合の出力との間の差分について、3次モーメントと、4次モーメントという高次統計量を計算する。3次モーメントの値が所定の閾値より大きいかまたは、4次モーメントの値が所定の閾値より大きい場合、線形制御入力項と、非線形制御入力項の和として、制御器を構成する。3次モーメントの値と4次モーメントの値がどちらも、所定の閾値より小さいと判定した場合、システムは、線形制御入力項のみを用いて制御器を構成する。
(もっと読む)
制御器の構成方法、システム及びプログラム
【課題】スケジューリング・パラメータ・ベクトルの各候補について、制御器を自動的に構成するための技法を提供する。
【解決手段】プラントのLPVモデルを記述し、スケジューリング・パラメータ数を与え、複数の要素からなるスケジューリング・パラメータ・ベクトルの各要素には、制約条件の上位要求から出てくる最大値と最小値が与えられ、その各候補について、Min、Max、それらの中間値の各々の間について、νギャップを計算し、νギャップ間の差が大きいものから順番にスケジューリング・パラメータ候補とし、最初に与えられたパラメータ数を選び、LMIに変換し、選定したスケジューリング・パラメータの最大値と最小値に関する全ての組み合わせ端点についてH∞基準によって制御器を求め、パラメータ選定時に計算したνギャップによって重み付けした双一次補間によって一般化プラントへの制御器を構成する。
(もっと読む)
制御パラメータ調整装置、制御パラメータ調整方法、及びプログラム
【課題】アクチュエータを制御するための制御パラメータを容易に調整可能な制御パラメータ調整装置、制御パラメータ調整方法、及びプログラムを提供する。
【解決手段】調整装置300は、電動アクチュエータ100の識別情報と、制御パラメータを調整するための調整ルールを表す調整ルール情報とを対応付けて記憶する電動アクチュエータ情報DB310と、制御パラメータを調整する制御部330とを備える。制御部330は、入力部320に入力された電動アクチュエータ100の識別情報に対応する調整ルール情報を電動アクチュエータ情報DB310から取得し、電動アクチュエータ100の等価慣性モーメントと取得した調整ルール情報が表す調整ルールとに基づいて、制御パラメータを算出し、制御装置200に記憶されている制御パラメータを更新する。
(もっと読む)
器用さ獲得装置
【課題】従来のノイマン型コンピュータは高度な工夫を必要とする処理は不得手である。高度な工夫に対応するには外部から人間がプログラムを書き換えるか、新たな設計を行って、新たな機能を追加する必要がある。新たな機能を追加する度に、開発コストがかさむという問題がある。このような問題点を解決すべく、人間が持つ特徴の一つである器用さ、と同様の機能を得ることができる、器用さ獲得装置を提供する。
【解決手段】器用さ獲得機能を可能とするため、処理するデータ全てに快・不快の指標値を付与して、デジタルデータ化してなり、処理要求を満たす学習データには、より大きい(高い、上位)快指標値を付与し直してデータ保存(記憶)してなり、最も大きい快指標値を持つデータを選択的に使用して、出力装置に指令を出す自律型学習システムとして動作する。
(もっと読む)
データ処理装置、データ処理方法、及び、プログラム
【課題】未知の環境を効率的に学習する。
【解決手段】状態価値算出部32は、エージェントの行動によって、状態が遷移する、行動ごとの状態遷移モデルの各状態について、現在状態等の所定の状態に近い状態への遷移確率が大きい状態ほど、値が大きくなる、現在状態を基準とする状態価値を算出し、行動価値算出部33は、状態遷移モデルの各状態、及び、エージェントが可能な各行動について、現在状態を基準とする状態価値が大きい状態への遷移確率が大きいほど、値が大きくなる行動価値を算出する。目標状態設定部34は、行動価値のばらつきが大きい状態を、エージェントが行う行動によって到達する目標となる目標状態に設定し、行動選択部35は、目標状態に向かう行動を選択する。本発明は、例えば、自律的に行動するエージェントが未知の環境を学習する場合に適用できる。
(もっと読む)
プラントの運転条件最適化システム、プラントの運転条件最適化方法、プラントの運転条件最適化プログラム
【課題】安価かつ容易にモデル化でき、人が制御・設定できる変数を用いることにより現実にプラントに実装でき、取得したデータが示していた変数間の相関性を保った範囲で最適な運転条件が得られるプラントの運転条件最適化システム等を提供する。
【解決手段】計測データ記録部43は、運転状態データ取得部41により取得された運転状態データS−DATAと運転指標データ取得部42により求められた運転指標データI−DATAとを所定の項目に基づき関連させた一連の計測データとして計測DBに記録する。回帰モデル作成部44は、運転状態データS−DATA側を表す運転状態変数を説明変数とし、運転指標データI−DATA側を表す運転指標変数を目的変数として所定の多変量解析を行って回帰モデルを作成する。運転指標変数最適化部45は、回帰モデルに基づき運転指標変数を最適化する運転状態変数を求める。
(もっと読む)
モデル構成装置
【課題】制御対象のモデルのパラメータを低い演算負荷で、且つ正確に同定すること。
【解決手段】制御対象のモデル式のパラメータを同定し、パラメータの同定によって最適なパラメータ値として求められたパラメータ値をモデル式に適用することによって制御対象のモデルを構成する。そして、制御対象に関する物理法則上の制約を破ることがないモデル式のパラメータの条件を記述した制約条件式を取得し、取得された制約条件式が成立する範囲内でモデル式のパラメータを同定する。
(もっと読む)
高度プロセス制御システム及び信頼指数を有する仮想測定による方法
【課題】R2RモデルでのVMのデータ品質を効果的に考量でき、R2R制御及び測定遅延のVMフィードバックループでの信頼度を考量できない問題を克服し、且つ、APC効能を向上させる方法を提供する。
【解決手段】APCシステムは、工程ツール100と、測定ツール110と、仮想測定(VM)モジュール120と、信頼指数(RI)モジュール122と、R2Rコントローラ130とを備える。工程ツールに使用される、複数の履歴ワークを処理するための複数組の履歴工程データを取得し、測定ツールによって履歴ワークの複数の履歴測定データを取得する。複数組の履歴工程データ及び履歴測定値を用いることによって、推定アルゴリズムに基づいて推定モデルを構築し、複数組の履歴工程データとそれらに対応する複数組の履歴測定値を用いて、参照モデルを構築する。R2Rコントローラは工程ツールを制御して、工程ランを実行させる他のステップを実行する。
(もっと読む)
編集方法および編集装置
【課題】従来のブロック線図の編集機能は十分とは言えない。
【解決手段】ブロック線図の編集方法は、ブロック線図を生成するステップと、ブロック線図のブロックに対する除外指定を受け付けるステップと、除外指定されたブロックの出力をブロック線図の新たな入力として扱うステップと、除外指定されたブロックの入力をブロック線図の新たな出力として扱うステップと、を含む。当該編集方法はさらに、除外指定されたブロックの出力をブロック線図の新たな入力とみなし、除外指定されたブロックの入力をブロック線図の新たな出力とみなした上で、ブロック線図を状態方程式に変換するステップを含む。
(もっと読む)
制御装置およびチューニング方法
【課題】大幅なコストの増加を伴うことなく、適切なチューニングを実現できるようにする。
【解決手段】制御装置1では、チューニングツール120からの開始指令を受けて、高速にアクセス可能な第2メモリ20に制御パラメータが記憶され、この制御パラメータが制御対象の制御時に参照されるようになる。そうすると、開始指令から終了指令までの間に実施されるチューニングでは、第2メモリ20の制御パラメータで示される具体的な値が順次変更されながら、各値について制御対象が制御され、その制御結果に応じて最適な制御パラメータが確定されていくことになる。さらに、このチューニングが実施されている間、第2メモリ20における制御パラメータへのアクセスは、そのアクセスに要する時間と、第1メモリにおける制御パラメータへのアクセスに要する時間と、の時間差に応じて遅延されるようになる。
(もっと読む)
実空間アプリケーションサービスの制御システム及び制御方法
【課題】シナリオの導入及び解除に伴うコスト低減、適切な機器競合の検出及び解消方法、シナリオを複数ユーザで利用可能とする利用形態の多様性を実現することができる実空間アプリケーションサービスの制御システムを提供する。
【解決手段】実空間アプリケーションサービスは、これに対応するアプリケーションソフトウェアが実行されることにより実現され、その内容はアプリケーションソフトウェアの記述できる範囲において自由に変えることができるともに、アプリケーションソフトウェアは複数同時に存在し、動作することが可能であり、実空間アプリケーションサービス、実空間アプリケーションサービスを制御するシステムのユーザ、機器、実空間アプリケーションサービス及び実空間アプリケーションサービスが提供される場所のそれぞれに対応したソフトウェアエージェントを具備する。
(もっと読む)
21 - 40 / 176
[ Back to top ]