
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
141 - 160 / 162
流体制御弁及び弁開閉時期制御装置

【課題】 流体の温度や圧力等の条件に応じて弁体の振動状態を積極的に制御することにより、弁体の応答性を適切なものとし、或いは流体の圧力が低い場合に流体の不足分を補う動作を行わせることができる流体制御弁を提供する。
【解決手段】 弁体41の位置に応じて流体の供給を制御する弁本体4と、通電量に応じて弁体41の位置を変位させる電磁駆動手段5と、電磁駆動手段5に対する通電量をパルス幅変調信号のデューティ比により制御する制御手段6とを備え、制御手段6は、流体の温度及び圧力の一方又は双方の条件に応じて、電磁駆動手段5に対して出力するパルス幅変調信号の周波数を変更する制御を行う。
(もっと読む)
制御装置

【課題】制御対象の出力の未来値を精度よく推定することができ、ひいては、その推定値を用いる制御対象の出力の制御を良好に行うことができる制御装置を提供する。
【解決手段】例えば排気系Eを制御対象とする制御ユニット7は、排気系Eの出力を検出するO2センサ6の出力等を用いて排気系Eのモデルのパラメータを同定し、その同定値を用いてO2センサ出力の未来値を推定し、さらにその未来値を用いてO2センサ出力を所定の目標値に収束させるように排気系Eへの入力を規定する操作量を求める。パラメータの同定においては、モデルの出力とO2センサ6の出力との偏差にフィルタリング処理を施したものを最小化するように、パラメータを同定する。フィルタリング処理の周波数に対するゲイン特性は、排気系Eの周波数特性に影響を及ぼす排ガス流量に応じて適宜変更される。
(もっと読む)
制御装置
【課題】 制御対象が位相遅れやむだ時間などが比較的大きい動特性を示す場合でも、制御対象の入出力間での制御タイミングのずれを解消することができ、それにより、制御の安定性および制御性を向上させることができる制御装置を提供する。
【解決手段】 制御装置1は、制御対象の出力状態の予測値PREVO2を算出する予測値算出手段(ECU2、状態予測器22)と、Δ変調アルゴリズム、ΔΣ変調アルゴリズムおよびΣΔ変調アルゴリズムのうちのいずれか1つの変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、制御対象の出力Voutを制御するための、制御対象への制御入力(目標空燃比KCMD)を算出する制御入力算出手段(ECU2、DSMコントローラ24)と、を備える。
(もっと読む)
制御装置
【課題】 制御対象モデルを用いる場合において、制御対象の動特性が一時的に急変した際でも、制御系の安定性を確保することができる制御装置を提供すること。
【解決手段】制御装置1のECU2は、推定アルゴリズムにより算出した燃料圧の推定値Pf_hatと燃料圧Pfとの偏差である第1推定誤差e_dovに、ローパスフィルタ処理およびレートリミット処理を施すことにより、第1外乱推定値c1を算出し、第1推定誤差e_dovと第1外乱推定値c1との偏差である第2推定誤差e_dov_Hに基づき、所定の外乱推定アルゴリズムにより、第2外乱推定値c2を算出し、燃料圧Pf,第1および第2外乱推定値c1,c2に基づき、所定の制御アルゴリズムにより、燃料圧制御入力Upfを算出する。
(もっと読む)
制御装置
【課題】 外乱に起因する出力の揺らぎなどを抑制でき、制御対象の出力の高い安定性および制御精度を得ることができる制御装置を提供する。
【解決手段】 制御装置1は、検出された制御対象の出力Cainを所定値Cain_shに保持する仮想干渉力Fvsを発生させるために、制御対象に入力される仮想干渉入力Ushを算出し、仮想干渉入力Ushが入力された制御対象を拡大制御対象とし、拡大制御対象に入力される仮想制御入力Wcainを、拡大制御対象の出力Cainが設定された目標値Cain_cmdに収束するように、所定の応答指定型制御アルゴリズム[式(4)〜(9)]に基づいて算出する(ステップ5)。
(もっと読む)
制御装置
【課題】制御対象の周波数特性の動的な変化の影響を適正に補償して、制御対象の出力の制御を良好に行うことができる制御装置を提供する。
【解決手段】例えば排気系Eを制御対象とする制御ユニット7は、排気系Eの出力を検出するO2センサ6の出力等を用いて排気系Eのモデルのパラメータを同定し、その同定値を用いてO2センサ出力を所定の目標値に収束させるように排気系Eへの入力を規定する操作量を求める。パラメータの同定においては、モデルの出力とO2センサ6の出力との偏差にフィルタリング処理を施したものを最小化するように、パラメータを同定する。フィルタリング処理の周波数に対するゲイン特性は、排気系Eの周波数特性に影響を及ぼす排ガス流量に応じて適宜変更される。
(もっと読む)
電動モータ駆動車両の制振制御装置
【課題】電動モータ駆動車両の制振効果をより向上させた制振制御装置を提供する。
【解決手段】第1のトルク目標値を設定する手段と、電動モータの回転速度推定値を算出し、回転速度推定値と実回転速度との偏差を求める手段と、バンドパスフィルタH(s)を用いたH(s)/Gp(s)のフィルタを備え、前記偏差を前記フィルタに通すことにより第2のトルク目標値を算出する手段と、第1のトルク目標値と第2のトルク目標値を加えてモータトルク指令値とし、その指令値に出力トルクが一致するように制御し、かつH(s)/Gp(s)のフィルタの遮断周波数を、駆動系のねじり共振周波数fpとハイパス側遮断周波数fcHとの比およびローパス側遮断周波数fcLと上記fpとの比がKfc=fp/fcH=fcL/fpとなるKfcに設定した場合に、第2のトルク目標値をKfb=Kfc2−2・Kfc・ζp+1なるゲインKfb倍に増幅する手段を備えた電動モータ駆動車両の制振制御装置。
(もっと読む)
モデル予測制御装置及びモデル予測制御方法
【課題】 正確な状態推定を行なって安定な制御を可能にすること。
【解決手段】 モデル予測制御装置に配置されている、制御対象の状態推定量を推定する内部状態推定部20に、評価部25で使用する状態推定評価式を変更する評価式変更部27を設ける。状態推定評価式による評価値あるいは最適操作量検出部で使用する最適操作評価式による評価値が悪化した場合、又は制御量の予測値と実測値との偏差が大きくなった場合、評価式変更部27により状態推定評価式を変更して、安定な制御を実現する。
(もっと読む)
プラントの制御装置
【課題】複数の制御入力と複数の制御量との間に存在する相互干渉を解消しながら、複数の制御量を制御する場合において、制御性および制御精度を向上させることができるプラントの制御装置を提供する。
【解決手段】制御入力としてのTH_cmd,Liftin_cmdと、制御量としてのPB,Gcylとの間に相互干渉が存在するプラント90の制御装置1は、プラント90を離散時間系モデルとしてモデル化したプラントモデル(式(20))に基づく、所定の応答指定型制御アルゴリズム(式(2)〜(8))と所定の非干渉制御アルゴリズム式(9)とを組み合わせた所定の制御アルゴリズムにより、2つの制御入力TH_cmd,Liftin_cmdを、PB,Gcylを目標値PB_cmd,Gcyl_cmdにそれぞれ追従させるための、相互干渉を解消するような2つの非干渉化入力として算出する。
(もっと読む)
制御装置
【課題】制御系としては簡素でありながら、複数の制御対象出力をフィードバックし、それぞれの出力(制御量)によりそれぞれ異なる制御対象出力目標応答算出手段を持ち、複数の制御対象出力を制御し、それぞれの最適な応答を得られる制御系を構築する。
【解決手段】フィードバックおよびフィードフォワード第1制御入力の和を参照し、第2制御量目標値設定手段により第2制御量目標値が設定され、第2制御量フィードバック制御入力演算手段により、第2制御量目標値と、第2制御量推定手段により推定または検知される第2制御量を参照してフィードバック第2制御入力が演算され、フィードバックおよびフィードフォワード第2制御入力の和を参照し、制御入力演算手段により制御入力が演算され、制御対象制御手段により、制御対象の第1および第2制御量が制御されることを特徴とする制御装置。
(もっと読む)
モデル予測制御装置及びモデル予測制御方法
【課題】 モデル予測制御を直接適用することが困難なシステムに対しても、モデル予測制御を適用すること。
【解決手段】 燃料電池スタックとその補機からなるシステムに対して、まず補機の目標値を大きく設定して(S1)、燃料電池スタックのモデルを用いて目標値を最適化する(S2)。次に、最適化された目標値を満足するように、補機のモデルを用いて補機の操作量を最適化する(S3)。さらに、最適化された補機の操作量から車両燃費を算出し、これを考慮して補機の操作量を再度最適化して、最適化された操作量を実機に与える。
(もっと読む)
モデル予測制御装置およびモデル予測制御方法
【課題】 モデル予測制御において、予測演算時間を短縮しかつ安定制御を実行する。
【解決手段】 最適操作量候補検索部31により、最適操作量の候補を検索し、モデル予測部33により、制御対象20の動特性モデルを用いて制御量を予測し、評価部35により、予測された前記制御量と目標値との偏差をとって評価し、最適操作量を決定する。最適操作量候補の検索に先立って、操作量検索範囲設定部4により制御対象の動特性モデルを用いて検索範囲を設定し、無駄な検索を行なわないようにする。また、今回の予測制御を開始するにあたって、前回の最適操作量を今回の最適操作量の候補として予測した制御量と目標制御量との偏差が所定範囲内にある場合、前回の最適操作量を今回の最適操作量と決定するようにすれば、さらに予測に要する時間を短縮することができる。
(もっと読む)
モデル予測制御装置
【課題】 操作に応じて予測演算を高速化し、制御対象に応じて制御の安定化を図る。
【解決手段】 モデル予測制御装置10の最適操作量決定部3は、制御対象20の動特性モデルを用いて最適操作量候補について制御量を予測し、最適操作量を決定する。最適操作量精度設定部4は、操作の種類ごとに最適操作量の精度を設定して、最適操作量の検索回数を制限する。時定数変化観測部6により制御対象20の時定数変化が観測されると、時間および区間設定部8は、時定数変化に応じてサンプリング時間と予測区間と制御区間との少なくとも一つを変更して制御を安定化させる。
(もっと読む)
制御装置
【課題】 制御量を可動機構を介して制御する場合において、可動機構の可動部をその可動範囲の限界まで駆動する際の衝撃力の低減および駆動時間の短縮を両立させることができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、Liftin<Liftin_VPL,Liftin_VPH<Liftinのときには、切換関数設定パラメータPOLE_lfを、値−1に近い所定値POLE_lf2側の値として算出し(ステップ25)、これを用いて、式(3)〜(10)により、可変バルブリフト機構50を制御するためのリフト制御入力Uliftinを算出する(ステップ26)。
(もっと読む)
プラントを制御する制御装置
【課題】モデルパラメータの変化に起因して外乱推定値が変動することを回避し、定常偏差を抑制する。
【解決手段】モデル化されたプラントを制御する制御装置が提供される。該モデル化されたプラントは、プラントの入出力、モデルパラメータ、およびプラントに印加される外乱を推定した値に基づくモデル式により表される。モデル式は、外乱推定値に少なくとも1つのモデルパラメータが乗算された項を含む。制御装置は、モデルパラメータを同定する手段と、モデル式に基づいて算出されるモデルの出力と、プラントの実際の出力との偏差が最小になるように、外乱推定値を算出する手段と、モデル式に基づいてプラントに印加すべき前記入力を算出し、プラントを制御する制御手段とを備える。こうして、該プラントへの入力に、外乱推定値が、モデルパラメータで演算されることなく反映されるようにする。
(もっと読む)
モデルベース制御装置およびその設計方法
【課題】 入力と出力の間に無駄時間を含む制御対象を制御するモデルベース制御装置に関し、上記の制御対象を2自由度系制御により精度良く制御することを目的とする。
【解決手段】 無駄時間が存在しない場合に制御対象12の出力Yと入力Xの間に成立する関係を模擬した無駄時間無し逆モデルP'-1によりFFコントローラ20を構成する。上記入力Xと出力Yの間に現実に成立する伝達関数を模擬した無駄時間有り順モデルP'e-sTにより時間コントローラ24を構成する。制御対象12の出力目標値YTを無駄時間無し逆モデルP'-1に供給して、入力基本値XBを算出する。入力基本値XBを無駄時間有り順モデルP'e-sTに供給して出力予測値Y'を算出する。出力予測値Y'と実出力Yとの差ΔYが消滅するようにFB補正量ΔXを算出し、その値により入力Xを補正する。
(もっと読む)
PID制御装置
【課題】 PID制御装置にさらに素早くスムーズな応答性をもたせる。
【解決手段】 PID制御装置7は、制御対象の応答出力値と目標値との偏差に基づいて制御出力を演算するPID制御装置であり、偏差に比例した比例値を出力する比例演算手段20と、偏差の時間積分に比例した積分値を出力する積分演算手段30と、偏差の時間微分に比例した微分値を出力する微分演算手段40と、微分値が予め定められた第1規制範囲内にない場合に積分値を無効とする積分演算規制手段50と、偏差の符号の変化を監視し、符号の変化に応じて微分値が予め定められた第2規制範囲を超えないようさらに演算する微分演算規制手段60とを備えている。
(もっと読む)
内燃機関の制御装置
【課題】 ISCのフィードバック制御の応答性と目標回転速度への収束性(安定性)とを両方とも向上させる。
【解決手段】 ISC実行中に実エンジン回転速度の変化方向が目標回転速度に対して近付く方向か遠ざかる方向かを判定し(ステップ102)、遠ざかる方向である場合は、積分項のゲインを大きめの値に設定した第1のゲイン設定テーブルを選択し、この第1のゲイン設定テーブルを参照してその時点の実際の回転速度偏差ΔNE2に対応した積分項のゲインを算出する(ステップ103)。一方、実エンジン回転速度が目標回転速度に近付く方向に変化している場合は、前記第1のゲイン設定テーブルよりも積分項のゲインを小さい値に設定した第2のゲイン設定テーブルを選択し、この第2のゲイン設定テーブルを参照してその時点の実際の回転速度偏差ΔNE2に対応した積分項のゲインを算出する(ステップ104)。
(もっと読む)
プロセス制御システム
本発明は、―送られてくる少なくとも一つのプロセス目標量から、少なくとも一つのプロセスアクチュエータの動作制御用の少なくとも一つのプロセス制御量を発生するように、前記少なくとも一つのプロセスアクチュエータの動作制御を行うための第1のプロセスモデルと、―前記少なくとも一つのプロセスアクチュエータの少なくとも一つのプロセス実制御量からプロセス実際量を発生する第2のプロセスモデルと、―比較用プロセス実際量を発生する更にもう一つのプロセス要素とを有しており、―前記第1プロセスモデルが、前記第2プロセスモデルの反転により写像可能であり、更にプロセス実際量と比較用プロセス実際量とから形成されるプロセス実際量の差が、コントロールユニットを中継して前記第1および第2プロセスモデルに送られるようになっている、少なくとも一つのプロセスアクチュエータの制御に用いられるプロセス制御システムに関する。本発明の課題は、そのようなシステムの精度を向上することにある。この課題は、前記プロセス要素がシミュレーション精度を向上した第3プロセスモデルとして構成されるとともに、少なくとも一つの非反転型プロセス構成部分を有することにより解決される。  (もっと読む)
(もっと読む)
油圧バルブ用の制御特性曲線を学習する方法
【課題】
電気制御される1つ以上のアナログ式油圧バルブ設備を補正する本発明の方法及びコンピュータプログラムは、制御される車両ブレーキシステム内に精確な制御特性曲線を備える。このため、少なくとも1つ又は個々の制御特性曲線が、制御装置の作動中にプリセットされる。このプリセットされた制御特性曲線は、車両の運転中に、特にアンチロック制御の操作中に学習方法を使用して補正される。 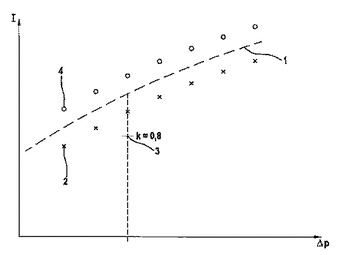 (もっと読む)
(もっと読む)
141 - 160 / 162
[ Back to top ]