
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
61 - 80 / 162
制御装置
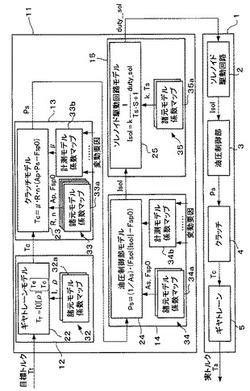
【課題】開発効率を改善することが可能な制御装置を提供する。
【解決手段】操作量としてのソレノイド駆動デューティduty_solの入力から制御量としての実トルクTaの出力までの過程が複数の制御要素としてのソレノイド駆動回路2、油圧制御部3、クラッチ4及びギヤトレーン5に区分可能な自動変速機1を制御対象とし、実トルクTaに対する目標値Ttに基づいてソレノイド駆動デューティduty_solを演算する制御装置11において、制御要素2〜5のそれぞれと対をなすように設けられ、対応する制御要素の出力から入力を逆算するように構成された複数の逆算部12〜15を具備し、目標値が逆算部12〜15にて順次逆算されてソレノイド駆動デューティduty_solが演算されるように逆算部12〜15を制御要素とは逆順で組み合わせる。
(もっと読む)
車両の駆動力制御装置

【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
パラメータ同定装置およびパラメータ同定プログラム
【課題】パラメータを効率的に同定する。
【解決手段】モデル12の出力と実機10の出力波形との差を時間毎に抽出したものを得る。また、パラメータを公差範囲内にて変動させた場合のモデル出力の上下限を時間毎に抽出したものを得る。得られた2つの抽出したものを比較し、パターンマッチングすることにより、誤差を効果的に減少させることができるパラメータを抽出する。そして、抽出されたパラメータについてさらに同定する。
(もっと読む)
移動体の入力決定手段、及びその手段を有するハイブリッド車両と多関節移動ロボット
【課題】将来状態の予測が困難なハイブリッド車両や移動ロボットでも、最適制御問題を解いて特定動作における損失の最小化を図る。
【解決手段】入力決定手段15は外部入力11と出力12とを入力とし、内部入力16を生成する。移動体10は冗長性を持ち、ある外部入力11に対応する出力12を生成する方法が複数個あるものを対象とする。内部入力16は入力決定手段15により、予め決められた評価関数を最小または最大になるように決定される。入力決定手段15は将来状態予測手段21、最適化演算手段22、制約条件判定手段23を有する。最適化演算結果通知手段27は最適化演算で得られた解が実行不可能な場合そのことを外部に通知するために設けたものであり、LED、液晶表示、メモリなどとして実現される。これは開発時のデバッグを容易にするのみならず、オフライン診断としても使用する。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
モータを用いた駆動系の捩り振動制振制御方法
【課題】機差に応じた補正を行って効果的な捩り制振を行う方法を提供する。
【解決手段】動力源から車輪に到る駆動系にモータが含まれるとともに、その駆動系を捩り振動系としてモデル化した捩り振動モデルにおける捩り振動を抑制するために予め用意した数式モデルに基づいて前記モータをフィードフォワード制御することにより前記駆動系における捩り振動を抑制する、モータを用いた駆動系の捩り振動制振制御方法において、前記捩り振動系における前記モータを除いたいずれかの回転角度を基準とし、その基準となる回転角度の変化量に対する前記モータの回転角度の変化量の比の設計値と実測値との偏差Δαを求め、その偏差に基づいて、前記数式モデルにおける捩り変位を抑制する係数の設定値を補正する。
(もっと読む)
回転数制御装置
【課題】計算周期を変更することによって回転数フィードバック制御を適切に行うことが可能な回転数制御装置を提供する。
【解決手段】回転数制御装置は、回転数センサの検出値に基づいて、回転体が目標回転数となるように回転数フィードバック制御を行う。計算周期変更手段は、回転数が所定値以下となった場合に、回転数が前記所定値よりも大きい場合と比較して、回転数フィードバック制御の計算周期を長く変更する。つまり、回転数が低下した際に、回転数センサの信号処理時間を伸ばした上で、回転数フィードバック制御における計算周期を擬似的に延長する。これにより、回転数が低下した際に、回転数フィードバック制御における指令値が非連続的に変化してしまうことを適切に抑制することが可能となる。
(もっと読む)
サーボ制御方法、サーボ制御装置
【課題】オープン制御から適応スライディングモード制御へと移行する際の制御性の悪化を回避する。
【解決手段】オープン制御から適応スライディングモード制御へと移行する際に、適応スライディングモードコントローラ51の制御入力を移行直前のオープンコントローラ52の制御入力に一致させるべく、適応スライディングモードコントローラ51の状態量を算定するようにした。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】計算量を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定することで、方策の勾配を推定し、推定結果に基づいて、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
能動型防振適応制御装置
【課題】安定領域を算出する際に近似式ではなく適応制御アルゴリズムに用いる関数そのものを用いることができる適応制御アルゴリズムによる能動型防振適応制御装置を提供する。
【解決手段】誤差信号e(t)などを用いて、正弦成分と余弦成分の相関を利用して、防振対象振動の推定未知関数dh(t)の振幅ahおよび位相φhを算出する。算出された防振対象振動の推定未知関数dh(t)の振幅ahおよびφh、および、伝達関数の推定値Gh(s)に基づき、制御信号u(t)の振幅Ahおよび位相Φhを算出し、且つ、制御信号u(t)の振幅Ahおよび位相Φhを更新する。
(もっと読む)
状態推定システム
【課題】観測データに含まれるノイズや不要なデータを除去して的確な入力情報のみをニューラルネットワークに適応可能とし、教師データへのマッチング精度や計算速度を向上させる。
【解決手段】状態推定システム1は、NNS2への前処理部として、観測データを独立成分分析するICA部5と主成分分析するPCA部6とを備え、ICA部5、PCA部6、NNS2への入力パターンを適応的に決定するGA部7を備えている。ICA部5は観測データから電気的・機械的なノイズ成分を除去した原信号を推定してNNS2へ入力し、PCA部6はICA部5では把握しきれない非線形な部分での不要なデータを除去し、誤差を低減した代表的な特性データをNNS2へ入力する。これにより、NNS2への入力情報を的確な情報とすることができ、NNS2における教師データへのマッチング精度や計算速度を向上させることができる。
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
プラントの制御装置
【課題】 制御対象の動特性変化の大きい場合、外乱が大きい場合、あるいは制御対象が非線形特性を有する場合において十分なロバスト性及び安定性を有するスライディングモード制御を行うことができるプラントの制御装置を提供する。
【解決手段】 スライディングモード制御器101、減算器102、及び周波数整形制御器103により、制御対象100への制御入力となる最終操作量UFMを算出する。減算器102、周波数整形制御器103、及び制御対象100からなるブロックを拡大制御対象110とし、拡大制御対象110の伝達関数FX(s)が所望の目標伝達関数F(s)となるように、周波数整形制御器103の伝達関数H(s)が設定される。CS角度CSAがCS角度指令値CSACMDと一致するようにフィードバック制御が行われる。
(もっと読む)
機器制御方法及び機器制御装置
【課題】 複数入力一出力形態の機器制御において、取得の容易なモデル制御パターンを用意するだけで、簡単で開発工数の少ないアルゴリズムにより、任意の入力値に対し意図通りの出力結果が得られる機器制御方法を提供する。
【解決手段】 第二種入力変数βと出力変数αとが張る制御パターン空間CPSにおける、各被モーフィング座標点pa,pb,pcに対応するJ個のモデル制御パターンPA,PB,PCの形状を、M次元部分入力空間MPSにおける各被モーフィング座標点pa,pb,pcの実制御座標点pxまでの距離に応じた重みにてモーフィングすることにより、実制御座標点pxに対応する合成制御パターンPxを作成し、該合成制御パターンPxに基づいて入力値pxに対応する出力変数α値を計算する。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック制御を行う。プラントへの制御入力である出力操作量UFMを保持操作量UHOLDに設定可能であるときは、出力操作量UFMを保持操作量UHOLDに設定するとともに、制御偏差の積算値ERRIを保持操作量UHOLDと比例項UPとの差に積分項ゲインKIの逆数を乗算することにより算出し、積算値ERRIに積分項ゲインKIを乗算して積分項UIを算出する。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定を早期に適切に終了する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。ここにおいて、i回目の前記比較において得られる誤差(誤差の二乗和:ja(i))の変化量に基づいて、パラメータの修正量(勾配ベクトルの各要素S(i))についての上下限値(±Smax)を設定する(ステップ20)。これによって、上下限値が逐次変更され、適切な制限を掛けることができる。
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定が適切に行われたかを判定する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。パラメータを変化させた時の出力評価関数値の変化量について、比較して強い相関の組み合わせがあるかを全てのパラメータ同士の出力評価関数値の変化量について判定する(ステップ12,13)。強く相関の組み合わせがある場合に物理モデルまたは最適化対象の出力が物理パラメータを真値に漸近させるための十分な情報を含んでいないと、判断する(ステップ14)。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
制御システムの構築方法及び制御システム
【課題】逆モデルに依らず、安定したフィードフォワード制御系を構築することが可能な技術を提供する。
【解決手段】本発明では、伝達関数P(z-1)を、遅延演算子z-1の多項式N(z-1),D(z-1)を用いて、P(z-1)=N(z-1)/D(z-1)で表現可能な制御対象を制御するに際し、次の方法で、制御システムを構築する。即ち、規範モデルM(z-1)を、伝達関数P(z-1)の分子N(z-1)を含む関数M(z-1)=N(z-1)・L(z-1)に設定して、所望の規範モデルM(z-1)に対応する関数L(z-1)を導出する。そして、フィードフォワード操作量uff(i)を、関数L(z-1)及び伝達関数P(z-1)の分母D(z-1)を含む式Uff(i)=D・L・r(i)に従って、算出するように、フィードフォワード制御系を構築する。このようにして、本発明では、逆モデルP-1を用いずに、フィードフォワード制御系を実現する。
(もっと読む)
61 - 80 / 162
[ Back to top ]