
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
101 - 120 / 162
制御パラメータの自動調整装置

【課題】制御パラメータを精度良く最適化し、かつ、遺伝的アルゴリズムによる学習速度を向上させることが可能な車両制御における制御パラメータの自動調整装置を提供する。
【解決手段】制御パラメータの自動調整装置1、5は、遺伝的アルゴリズムの手法を用いて制御パラメータP1〜Pnの最適化を行って制御パラメータの最適値P1suit〜Pnsuitを出力する処理部2、6を備え、処理部2、6は、制御パラメータP1〜Pnを遺伝子として含む個体Ikの適合度Qkを算出する適合度算出手段22、62と、複数の個体Ikからなる個体群の中から一部の個体Ikを親個体Ia、Ib、Icとして選択する親選択手段24、64と、選択された親個体Ia、Ib、Icから遺伝的操作により子個体Ik*を生成させる世代交代手段25、65とを有し、最良の適合度Qkを有する個体Ikに含まれる制御パラメータを最適値P1suit〜Pnsuitとする。
(もっと読む)
制御装置

【課題】制御量以外の参照パラメータの検出結果の信頼性の低下などに起因して、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、高い制御精度を確保できる制御装置を提供する。
【解決手段】制御装置1の空燃比コントローラ100は、連結重み関数Wcpiを空燃比誤差推定値Eafなどに乗算して、修正誤差Weafiを算出し、この値Weafiが値0になるように、値Dlift_bsiを算出し、連結重み関数Wcpiを値Dlift_bsiなどに乗算して、値Dlift_lsiを算出し、この値Dlift_lsiの総和である値Dliftを値Liftinに加算することにより、値Liftin_modを算出し、この値Liftin_modに応じて、空燃比をフィードフォワード制御するための第1推定吸気量Gcyl_vtを算出し、空燃比をフィードバック制御するための空燃比補正係数KAFを算出し、これらに応じて燃料噴射量TOUTを算出する。
(もっと読む)
目標状態を定める方法、および、目標状態を定めるための装置
本発明は、複数の構成要素を有するシステム内の目標状態を定める方法であって、その際、システムでは、複数の構成要素の可用性に応じて優先度が異なるシステム状態が選択可能であり、最も優先度が高いシステム状態が選択可能かどうかについて検出する工程(102)と、最も優先度が高いシステム状態が選択可能である場合に最も優先度が高いシステム状態を目標状態として定める工程(104)と、最も優先度が高いシステム状態が選択可能ではない場合に、次に優先度が高いシステム状態が選択可能かどうかについて検出し(112)、次に優先度が高いシステム状態を目標状態として定める工程(114)とを含む、複数の構成要素を有するシステム内の目標状態を定める方法に関する。 (もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成するものであり、第1のシミュレーションモデル作成手段と、第2のシミュレーションモデル作成手段と、を備える。第1のシミュレーションモデル作成手段は、所定の時刻で計測された実測データを基に対象の物理的な性質を考慮した第1のシミュレーションモデルを、複数の時刻で計測された実測データの夫々について作成する。第2のシミュレーションモデル作成手段は、作成された複数の第1のシミュレーションモデルを基に制御変数及び時刻を入力変数とする第2のシミュレーションモデルを作成する。これにより、経時変化による誤差を考慮したシミュレーションモデルを作成することができる。
(もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成する装置である。このシミュレーション装置では、シミュレーションモデルに入力データを入力して得られる出力データと出力データに対応する実測データとの誤差に対応する物理量の実測データを求め、出力データを、誤差に対応する物理量の実測データで補正してから、修正関数で補正する。このようにすることで、出力データを実測データに精度良く近似することができる。
(もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成する装置である。シミュレーションモデル作成手段は、対象の物理的な性質を考慮したシミュレーションモデルを作成する。第1の修正関数生成手段は、シミュレーションモデルに入力データを入力して得られる中間データを対応する実測データに近づける第1の修正関数を生成する。第1の補正手段は、中間データを第1の修正関数で補正する。第2の修正関数生成手段は、シミュレーションモデルに第1の補正手段により補正された中間データを入力して得られる出力データを対応する実測データに近づける第2の修正関数を生成する。第2の補正手段は、出力データを第2の修正関数で補正する。このようにすることで、出力データを実測データに精度良く近似させることができる。
(もっと読む)
変速シミュレーション装置、変速シミュレーションプログラムおよび自動車
【課題】入力指令値もしくは変速動作を制御する装置の構成要素の特性値の変動に強い自動変速機制御用の入力指令値を得る。
【解決手段】入力指令値を初期設定し(S1)、その入力指令値に変更を加えてモデルによる変速シミュレーションを行う(S2)。そのシミュレーションの出力から、その出力による変動が小さくなるように目標波形を修正する(S4)。そして、修正された目標波形を得る入力指令値を学習計算によって得る(S5)。S2に戻り処理を繰り返し、変動が所定以内になることによって、適切な目標波形が得られ、その目標波形を達成する入力指令値を得ることができる。目標波形は、ファジィ推論によっても、感度解析によって求めてもよい。
(もっと読む)
リニアソレノイドの電流制御装置
【課題】リニアソレノイドの電流制御装置において、工数やコストをかけずに機差バラツキ及び特性変動を補償する。
【解決手段】リニアソレノイドの電流をフィードバック制御する際、規範モデルからリニアソレノイドの時定数を考慮した理想出力値を算出する。この理想出力値と電流センサで検知した実出力値との差から同定誤差を算出し、この値が0になるよう適応機構に基づき制御定数を決定する。決定した制御定数をフィードバック演算に使用することで、電源電圧や環境温度がどのような状態においても一定の応答性を実現し、さらに、機差バラツキを補償する。
(もっと読む)
モデル作成方法及び適合方法
【課題】複数の制御パラメータの組合せによって特定される各機関制御状態における特性パラメータの値を推定する特性パラメータ推定モデルを少ない計測工数で且つ精度良く作成するモデル作成方法を提供する。
【解決手段】まず、一部の制御パラメータの値を特定の値に固定した場合における残りの制御パラメータと特性パラメータとの関係について物理モデルを作成する。次いで、一部の制御パラメータの値を上記特定の値とは異なる値にすると共に残りの制御パラメータを所定の値として特性パラメータの値を計測すると共に残りの制御パラメータを所定の値として物理モデルによって特性パラメータの値を算出し、これら特性パラメータの計測値と算出値との差分又は比率について統計的近似モデルを作成する。そして、作成された物理モデルと統計的近似モデルとに基づいて特性パラメータ推定モデルを作成する。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
コントローラ
少なくとも部分的な自律性をもって、センサ測定データに基づきシステムの状態を完全に判断することが不可能である環境におけるシステムの状態を示す複数のセンサから受け取られた測定データに基づいて、前記システムを制御するように動作するコントローラが提供される。前記コントローラは、前記システムの動的進化のための確率の少なくとも1つの集合と、前記システムの前記複数のセンサのための対応する測定モデルとを定義するシステムモデルと、前記センサから測定データを受け取り、前記システムモデルを参照して、それぞれが前記システムの状態を表す複数のサンプルを生成するように動作する確率論的な推定器と、前記システムの考えられる状態を表す複数の考えられるサンプルのそれぞれについて、前記システムで実施される動作を定義する情報を定義する前記システムモデルに対応する規則集合と、前記確率論的な推定器の出力を受け取り、前記規則集合を参照して、前記システムで実行される1つ以上の対応する動作を定義する情報を選択するように動作する動作セレクタとを備える。 (もっと読む)
シミュレーションモデルの同定方法およびそのプログラム
【課題】複数のパラメータについての外乱を考慮したモデルを同定する。
【解決手段】パラメータ(外乱)の種類iを決定し(S1)、各パラメータ毎に、残差モデルを作成する(S2)。モデル出力と実機の出力との残差を計算し(S3)、その計算結果に基づいて、複数のパラメータの外乱の大きさを同定する(S4)。このとき、1つの残差についてパラメータの種類に応じた複数の外乱モデルの大きさを同定する。
(もっと読む)
システムの最適制御方法
【課題】予見不可能な時変目標値に追従する有限評価区間の非線形最適制御問題の制御則を導くことが課題である.
【解決手段】Receding Horizon制御を用いた非線形最適制御問題の近似解法を開発し,非線形システムの実時間制御に適用できる一般的手法を導いた.
具体例としてRR車の旋回限界域におけるDYCの目標横すべり角追従制御に適用した結果、一般的な比例制御に比べ追従性(応答性と収束性とも)が大幅に向上できることを確認した.また旋回限界域においてもニュートラルステア特性を実現できることを明らかにした.
(もっと読む)
制御装置
【課題】極値特性を有する制御対象や、制御対象モデルを漸化式で表せない制御対象を制御する場合でも、高レベルの制御の安定性および制御精度をいずれも確保することができる制御装置を提供する。
【解決手段】制御装置1は、協調コントローラ30、オンボードモデル解析器40およびモデル修正器60を備える。モデル修正器60は、吸気開角θlinおよび排気再開角θrblと図示平均有効圧Pmiの関係を定義した制御対象モデルを修正するために、モデル修正パラメータ行列θを算出し、オンボードモデル解析器40は、θを用いて修正した制御対象モデルに基づき、θlin,θrblとPmiの相関性を表す第1および第2応答指標RI1,RI2を算出する。協調コントローラ30は、θlinおよびθrblを、Pmiを目標値Pmi_cmdに収束させるように算出するとともに、θlin,θrblの増減度合および増減方向を、RI1,RI2に応じて決定する。
(もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
制御装置
【課題】プラントモデルがむだ時間を含む2次以上の高次遅れ系であっても、演算負荷を従来より軽減できるようにする。
【解決手段】制御対象(触媒+下流側排気ガスセンサ)を模擬するプラントモデルは、むだ時間を含む2次遅れ系で近似すると共に、2次遅れ系は、2つの1次遅れ系に分割して離散化した後結合して近似する。制御対象の入力をプラントモデルに入力した時のプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近付けるようにモデルパラメータを同定する。同定したモデルパラメータに含まれるむだ時間の一部の情報の変化に基づいてむだ時間を制御対象の実むだ時間に近付けるように推定する。
(もっと読む)
制御対象シミュレーション装置
【課題】少ないデータ量から多くのデータ量を生成して処理する制御対象シミュレーション技術を提供する。
【解決手段】制御対象シミュレーション装置は、時刻に対して変化し、所定の制御対象に関する物理量について、複数の時刻におけるデータを受け付け、受け付けたデータから任意の時刻に関するデータを算出し、算出される前記任意の時刻に関するデータに基づいて前記制御対象に関する物理量を制御する制御量を生成する制御装置から、前記制御量を入力し、前記任意の時刻に関するデータおよび前記任意の時刻における制御量にしたがって前記制御対象の動作を模擬し、前記任意の時刻の後の時刻におけるデータを生成する。
(もっと読む)
マイクロコンピュータをベースにしたシステムをシミュレーションするための方法及び装置
【課題】マイクロコンピュータをベースにしたシステムを開発するための方法及び装置である。
【解決手段】少なくとも1つのパラメータを有するコントローラモデル12がシミュレーションされ、同様に、少なくとも1つのパラメータを有し、コントローラモデル12によって制御されるプラントモデル14がシミュレーションされる。そしてユーザーインタフェースプロセッサ30はコントローラモデル12とプラントモデル14のパラメータにアクセスでき、必要であればトリガイベントに対応してコントローラモデル12とプラントモデル14の実行を一時停止する。ユーザーインタフェースプロセッサ30はトリガの時点で、コントローラモデルパラメータ、プラントモデルパラメータ、またはコントローラモデルのプログラムコードを変更することなく、コントローラモデルパラメータおよび/またはプラントモデルパラメータのステータスを決定する。
(もっと読む)
オンボード電源電圧リップルに対してロバストに電磁制御弁の電流を制御するための制御装置および方法
オンボード電源のリップルに対してロバストに自動車ハイドロリックユニット(HP)向けの電磁制御弁(CV)の電流を制御するディジタル閉ループ回路(CLS)を有し、前記閉ループ回路(CLS)の操作量として目標電流(SS)の飛び(ST)に対する動特性を改善するようにした自動車制御装置(CO)において、前記ディジタル閉ループ回路(CLS)のフィードバックパス(FB)に少なくとも1つの適応補正フィルタ(KFI)が設けられており、該適応補正フィルタのフィルタ時間(FT1,FT2)が目標電流(SS)のレベル変化(S1)に基づいて動的に調整可能である。 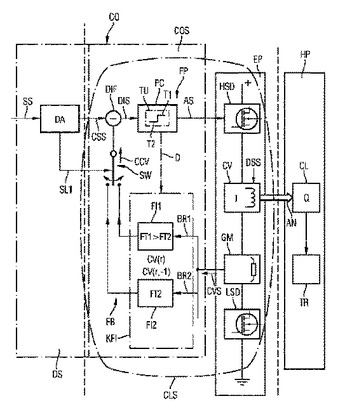 (もっと読む)
(もっと読む)
スライディングモード制御を用いた制御装置及び制御方法
【課題】 車両用の無段変速機等の制御に好適な、スライディングモード制御を用いた制御に関し、制御のハンチングをより確実に防止することができるようにする。
【解決手段】 無段変速機の目標変速比に応じた可動プーリの第1目標ストロークx1*を設定し、第1目標ストロークx1*に、可動プーリの実ストロークxとこの第1目標ストロークx1*との偏差e´の大きさに応じた遅れを与えて得られる第2目標ストロークx2*を用いてスライディングモード制御の切り換え関数σを設計し、この切り換え関数σに基づいてスライディングモード制御の非線形入力u´nlを演算し、演算した非線形入力を含む制御入力によりスライディングモード制御により可動プーリの位置を制御し、目標変速比状態とする。
(もっと読む)
101 - 120 / 162
[ Back to top ]