
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
41 - 60 / 162
制御装置

【課題】制御出力とその目標値との偏差の時間積分を状態変数とし、その状態変数を参照して線形入力及び非線形入力を反復的に演算するスライディングモードコントローラを利用して内燃機関またはそれに付帯する装置を制御する際に、前記状態変数に基づき算出される切換関数ベクトルの絶対値の増大を防ぎ、過渡域での制御性及び排気の改善を図る。
【解決手段】内燃機関またはそれに付帯する装置を制御する制御装置(ECU)に、スライディングモードコントローラと、状態変数に基づき算出される切換関数ベクトルが所定の変化量だけ変化したと仮定したときに生じる前記非線形入力の変化量に対応する制御出力の変化量の絶対値が所定の閾値を下回るという条件が成立した際に状態変数の更新を停止するとともに、状態変数の更新を停止している期間において制御出力とその目標値との偏差の正負が変化した際に状態変数の更新を再開する補正制御部とを備える。
(もっと読む)
制御装置

【課題】一部の制御出力の偏差を見かけ上0とする特定の状況下において、有利な制御入力を再現できるようにする。
【解決手段】内燃機関またはこれに付帯する装置に係る複数の制御出力をそれぞれの目標値に追従させる制御を実施するものであって、制御出力とその目標値との偏差の時間積分xz及びそれ以外のものxyを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、ある制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該制御出力に係る状態変数xz及びxyについての多項式Szxz+Syxyを0とする補正制御部52とを具備する制御装置5を構成した。ここで、Szは切換超平面を構成する行列Sの成分のうち前記状態変数xzに乗ずる列ベクトルであり、Syは同行列Sの成分のうち前記状態変数xyに乗ずる列ベクトルである。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
制御ロジック及びフィードバック制御方式
【課題】幅広い振動数帯域において振動低減効果を有する制御ロジック及びフィードバック制御方式を提供する。
【解決手段】畳み込み積分を含みフィルタ係数を更新する制御ロジックにおいて、入力信号として、エラー信号のみを用い、フィルタ係数の更新式を次式
【数1】
のようにして制御を行うことで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。前記制御ロジックによりフィードバックゲインをサンプリング時間ごとに修正することで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。
(もっと読む)
モデル予測制御においてフィードバック及びフィードフォワードを組み合わせるための方法及びシステム
【課題】非線形プラントにおけるモデルの不確実性の影響を最小化するために、フィードフォワード及びフィードバック制御を組み合わせる。
【解決手段】センサ信号プロセッサ140は、エンジン120上に配置された複数のセンサ110からの信号に基づいて、エンジンに関するパラメータ間の関係を決定して、エンジンと関連付けられているアクチュエータ130に対するフィードフォワード信号を算出し、モデルベース予測フィードバックコントローラ200に関する複数の制約条件をフィードフォワード信号の関数として処理するためのストラテジを提供する。アクチュエータ信号プロセッサ150は、アクチュエータに対する制御信号を、フィードバック信号及びフィードフォワード信号の総和として生成し、アクチュエータに送信する。制御信号に含まれるフィードバック信号が、外乱に関する不確実性の影響を最小化することができる。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 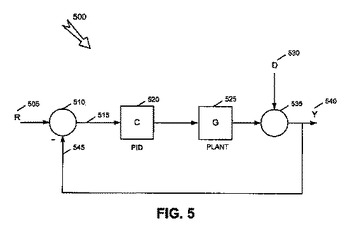 (もっと読む)
(もっと読む)
多目的最適解集合算出装置及び多目的最適解集合算出方法及び多目的最適解集合算出プログラム
【課題】所定の駆動基準を充足する全体最適解の集合を算出すること。
【解決手段】複数の駆動状態の複数の組み合わせ毎に基づいて算出されたトレードオフ関係にある複数の目的関数の組み合わせを最小化又は最大化する設計変数の部分最適解の集合と、複数のステップから構成されステップ毎に前記駆動対象の駆動条件が異なる駆動基準のステップ毎の駆動条件の値を入力する入力部1と、複数の駆動状態の複数の組み合わせ毎に抽出される部分最適解に基づいて、駆動状態の範囲内の部分最適解を予測可能な達成値マップを作成する達成値マップ作成部201と、駆動状態の項目毎に作成される達成値マップから達成値を抽出する達成値抽出部202と、達成値を前記駆動基準のステップ毎に積算して算出される総和達成値から全体最適解の集合を算出する全体最適解算出部21とを備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】ドライバがハンドルを切る際にはその操作感を損なわないようにしつつ、ハンドル戻し時には急な戻り感を低減して車両の収斂性を向上させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】路面反力に対するモータ速度の特性は、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法でモータを駆動する場合に比べて、従来のダンピング制御ありの場合の特性とほぼ同様に、所定の周波数帯域においてモータ速度が抑制される。一方、ハンドルトルクに対するモータ速度の特性については、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法の特性からほとんど変化がない。このように異なる2つの特性(仕様)を共に満たす制御装置を構成することで、ドライバのハンドル操作を妨げることなく車両の収斂性を向上させることが可能となる。
(もっと読む)
シミュレーション装置及びシミュレーション方法
【課題】制御装置で実行されるタスクの実行周期がモデル演算周期よりも短い場合であっても、シミュレーションの精度を向上させ、適切な信号値を制御装置に出力できるシミュレーション装置を提供する。
【解決手段】制御対象を模擬して制御対象の状態値を算出するモデル演算を所定のモデル演算周期で繰返すモデル演算部2と、前記モデル演算部2で算出された状態値を信号値に変換して制御装置7に出力する信号出力部4を備えているシミュレーション装置1であって、前記モデル演算部2により状態値が更新されるまでの間、過去の状態値に基づいて状態値を補正する状態値補正部51cを備え、前記信号出力部4は、前記状態値補正部51cにより算出された補正状態値を信号値に変換して前記制御装置7に出力するシミュレーション装置1。
(もっと読む)
フィードバック制御装置
【課題】制御対象の状態が大きく変化する場合に、制御対象の出力検出値に含まれる揺動成分を確実に除去して、操作量の不必要な振動を回避する。
【解決手段】フィードバック制御を行う制御装置50において、制御対象14へ入力する操作量ICMDに基づいて制御対象14の出力を推定する制御対象モデル63aと、推定した出力と制御対象の検出値θcsとから算出した出力θ1から検出値θcsに含まれる検出値揺動量を算出するためのバンドパスフィルタ63c〜63eと、を備え、制御対象14の状態変化が大きくなるほど通過帯域幅を広げ、制御対象の状態変化が小さくなるほど通過帯域幅を狭める。
(もっと読む)
アクチュエータ制御装置、アクチュエータ制御方法及びプログラム
【課題】油圧アクチュエータを制御するアクチュエータ制御装置を提供する。
【解決手段】本発明のアクチュエータ制御装置は、作動油圧値を変更する旨の変更指示要求に応じて、この変更指示要求の作動油圧値がヒステリシス特性における移行特性の特性状態にあるか否かを判定する油圧特性判定部11と、油圧特性判定部11から得られる判定結果が移行特性の特性状態にある場合に、この移行特性について近似したモデル化移行特性に従って油圧指示値を算出する油圧指示値算出部12と、該油圧指示値を、アクチュエータを制御するための制御信号に変換する信号変換部13とを備える。
(もっと読む)
制御対象の制御入力決定手段
【課題】制御対象に入力する制御入力を生成する複数の制御関数の重みを自動的に決定する制御入力決定手段を提供する。
【解決手段】重みが設定された複数の制御関数を有する制御式を用い入力される車両4の制御入力決定手段2であり、価値決定手段6が有する価値部分空間情報に基づいて要求指令に対応する状態の価値と重みの関係データを求め、方針決定手段8で関係データから制御目的を達成する最適化重みを選択し、最適化手段10でその最適化重みを制御式に適用して制御入力を生成し、その制御入力により車両4を制御する。次に、状態抽出手段12でその制御後の車両4の状態を抽出する。価値更新手段14で車両4の制御前の状態と制御後の状態との変化に基づいて、価値部分空間情報の価値を更新する。さらに、評価手段16で制御後の状態と制御目的の目標値との差を求め、その差に基づいて価値更新手段14の価値の更新を補正する制御入力決定手段2。
(もっと読む)
外乱振動抑制制御器
【課題】パラメータ設定に多くの工数を要することなく、外乱により発生する振動を抑制する効果を最大化できる外乱振動抑制制御器を得る。
【解決手段】ローパスフィルタを内在し、目標電圧Vref及び検出電流信号Iactに基づいて推定外乱電圧Vestを演算する外乱電圧推定オブザーバ61と、推定外乱電圧Vestの低周波成分をカットした信号Vest_HPを演算するハイパスフィルタ62と、Vest_HPにゲインKWを乗じて目標外乱抑制電圧Vref_wを演算する外乱電圧制御器(外乱制御器)63とを設け、前記ローパスフィルタのカットオフ周波数とハイパスフィルタ62のカットオフ周波数の積の平方根が外乱周波数と一致するように、前記ローパスフィルタ及びハイパスフィルタ62のカットオフ周波数を設定する。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック操作量UFBを算出し、フィードバック操作量UFBを平均化することにより平均化フィードバック操作量UFBAVを算出する。プラントの作動状態に応じて保持操作量UHOLDを算出し、保持操作量UHOLDと平均化フィードバック操作量UFBAVとを設定比率KRに応じて合成し、修正保持操作量UHLDCを算出する。出力操作量UFMを一定値に保持できるときは、出力操作量UFMを修正保持操作量UHLDCに設定するとともに、フィードバック操作量UFBを修正保持操作量UHLDCに設定する。
(もっと読む)
車両の制御装置
【課題】ダイナミクスを考慮したモデリングを可能にして推定精度を向上させると共に、限られたメモリ容量しか実装できない車両へのJITモデリングの適用を可能にするようにした車両の制御装置を提供する。
【解決手段】車両の運転を示すパラメータ群を計測し(S10)、計測されたパラメータ群を入力とし、対応して設定された出力と共に入力データuDB(i)、出力データyDB(i)として時系列に従って蓄積して蓄積データを得(S12)、入力に対して時刻tのときのモデルを同定するための要求点を設定し(S14)、設定された要求点と蓄積入力との距離を過去の入力も含めて求めて類似度を算出し(S16)、蓄積データから距離が小さいデータの集合を探索して近傍のデータとして決定し(S18)、それに含まれる出力データから推定出力を算出し(S20)、それに基づいて車両の運転を制御する(S22)。
(もっと読む)
制御器、制御方法及び制御プログラム
【課題】 自然状態行動勾配(NSG)の推定に関して分散を小さくすることによって、意思決定モデルの構築にかかる時間を短縮すること。
【解決手段】 マルコフ決定過程を用いる意思決定モデルを解くための自然状態行動勾配学習法において、NSGの推定に関して分散が大きくなり、多くの学習ステップを要してしまうという問題を解決するために、従来のNSGの推定式を観察して、そこに含まれているLSDが二次の項で表れていることに着目した。一般にLSDは推定誤差をもつので、NSGの推定式がLSDが二次の項を含むと、その誤差も二次のオーダーで効いてくるため、NSGの推定量の分散が非常に大きくなる。そして、NSGの推定式が、LSDの一次の項のみを含むように統計量の更新と、NSGの更新のアルゴリズムを改善した。
これによって、NSGの推定に関して分散が小さくなり、以って、意思決定モデルの構築にかかる時間を短縮することができた。
(もっと読む)
制御パラメータの適合化システム
【課題】事前に目標となる数値を定めることが困難な制御システムにおいても、最適な適合値を自動的に推定する。
【解決手段】エンジン1から排出される排気ガスの各成分量を分析する排気ガス分析計20の出力に基づいてECU10による空燃比制御における目標空燃比の指示値を制御部40で生成し、排気ガス分析計20及びエンジン1のO2センサの出力に基づいて状態評価部30で空燃比の制御状態を評価する。そして、状態評価部30の評価結果に基づいて制御部40で生成した指示値を適合値推定部50で調整して目標空燃比が最適な値となるように適合させ、最終的にECU10に格納される目標空燃比を確定する。これにより、空燃比目標値を予めマップに格納しておく場合等に、開発者の経験が必要なマップ作成作業を自動的且つ効率的に行なうことが可能となり、車両開発時における工数を低減してコスト低減を図ることができる。
(もっと読む)
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 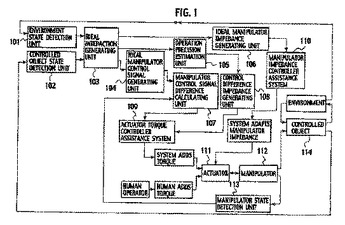 (もっと読む)
(もっと読む)
車載機器の制御装置及び制御方法
【課題】少なくとも一つの車載機器に対する複数の操作の提案順序を適切に決定できる車載機器の制御装置及び制御方法を提供する。
【解決手段】制御装置は、少なくとも一つの車載機器に対する二つの操作について、その二つの操作のうちの一方が実行された後に他方の操作が実行される遷移確率を記憶した記憶部(21)と、車載機器に関する少なくとも一つの推薦操作を選択する推薦操作決定部(23)と、推薦操作決定部(23)により複数の推薦操作が選択されたとき、その複数の推薦操作の提案順序を、記憶部(21)に記憶された遷移確率に従って決定する提案順序決定部(24)と、複数の推薦操作を、提案順序決定部(24)により決定された提案順序に従って、少なくとも一つの車載機器に対して実行する制御部(27)とを有する。
(もっと読む)
車両用速度制御システム
本発明は、予め設定された目標速度域内で燃費を指向しながら車速を制御するための、燃費指向の速度制御モードを起動するための操作ユニットと、前記燃費指向の速度制御が起動状態にあるときに、予め設定された最大エネルギ消費値に配慮しながら、前記予め設定された目標速度域内で車速を制御するようになっている、制御ユニットとを備えた、車両用の速度制御システムに関する。その際に車速は、前記予め設定された目標速度域内に位置する車速に調整することが可能である限りは、前記予め設定された最大エネルギ消費値を上回ることがないように、前記予め設定された最大エネルギ消費値に配慮しながら制御される。 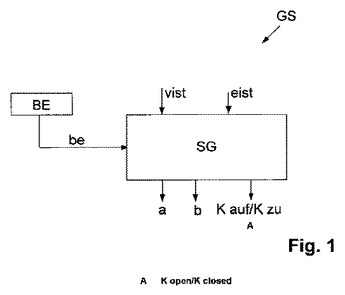 (もっと読む)
(もっと読む)
41 - 60 / 162
[ Back to top ]