
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
21 - 40 / 162
プラントの制御装置
【課題】 フィードバック制御を行うフィードバック制御器の伝達関数を、制御対象であるプラントに加わる外乱の影響を考慮して適切に設定し、設計工数を抑制しつつ良好な制御性能を得ることができるプラントの制御装置を提供する。
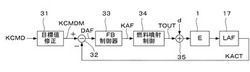
【解決手段】 フィードバック制御器33は、プラント(1,17)の制御出力(KACT)が目標値(KCMDM)と一致するように、プラントへ入力する制御入力(KAF)を算出する。フィードバック制御器33の伝達関数C(z)は、プラントをモデル化することにより得られる制御対象モデルの伝達関数P(z)の逆伝達関数と、制御入力(KAF)に印加される外乱dの制御出力(KACT)への感度を示す感度関数S(z)を用いて定義される外乱感度相関関数との積で表され、感度関数S(z)は、プラントの応答特性を示す応答特性パラメータ(α)を用いて定義される。
(もっと読む)
エンジン制御パラメータ適合化装置及びプログラム

【課題】エンジン特性値と制御パラメータの関係モデルに基づき複数の評価項目を十分に満足する準最適解を高速かつ効率的に取得するエンジン制御パラメータ適合装置の提供。
【解決手段】粒子群最適化手法により関係モデル式の評価関数を最小化するように制御パラメータの組み合わせを最適化するにあたり、収束性能改善手段により粒子の状態更新による粒子速度Viの変化量ΔViを監視し、変化量ΔViの各成分Δvijが所定の閾値を下回ったときに、速度成分vijに対して乱数を加えて、粒子を拡散する。これにより、粒子群最適化手法における局所最適解で探索が留まり実用上十分な収束性能を得られないという問題を解決する。
(もっと読む)
制御装置
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
制振装置
【課題】適応フィルタの発散を抑制して制振制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させた制振装置を提供する。
【解決手段】発散抑制モードにおいて、評価振動を構成する相殺振動(Vi4r+Vi4i)と所望の相殺振動Vi4iとの位相差βを低減して、適応フィルタ32fの算出が発散することが抑制される。そして、予め定めた伝達特性の位相成分を補正する場合に、位相成分の補正に起因して適応フィルタが発散するおそれのある通常モードから適応フィルタの発散を抑制する発散抑制モードに切り換えて、発散抑制モードにおいて位相成分の補正を実施するので、伝達特性を補正することによって補正後の伝達特性と現実の伝達特性との位相差が著しくかけ離れる場合であっても、適応フィルタの発散を抑制して制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させることが可能となる。
(もっと読む)
制御装置、電子制御ユニット、異常検出方法
【課題】ECUに搭載されたCPUと、ECUに供給される入力データの供給元の異常を判別できる制御装置を提供すること。
【解決手段】 第1のデータを出力し、前記第1のデータの後、第2のデータを出力するデータ出力手段22と、第1のデータから前記第2のデータを予測して予測データとして出力するデータ予測手段16と、第2のデータに演算を行う第1の演算手段Aと、前記予測データに演算を行う第2の演算手段Bと、前記第1の演算手段が前記第2のデータに演算を施した第1の出力値と、前記第2の演算手段が前記予測データに演算を施した第2の出力値と、を比較する比較手段17と、を有することを特徴とする制御装置100を提供する。
(もっと読む)
制御装置およびチューニング方法
【課題】大幅なコストの増加を伴うことなく、適切なチューニングを実現できるようにする。
【解決手段】制御装置1では、チューニングツール120からの開始指令を受けて、高速にアクセス可能な第2メモリ20に制御パラメータが記憶され、この制御パラメータが制御対象の制御時に参照されるようになる。そうすると、開始指令から終了指令までの間に実施されるチューニングでは、第2メモリ20の制御パラメータで示される具体的な値が順次変更されながら、各値について制御対象が制御され、その制御結果に応じて最適な制御パラメータが確定されていくことになる。さらに、このチューニングが実施されている間、第2メモリ20における制御パラメータへのアクセスは、そのアクセスに要する時間と、第1メモリにおける制御パラメータへのアクセスに要する時間と、の時間差に応じて遅延されるようになる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
制御因子特定用回帰式の生成方法
【課題】サンプルデータが多くても回帰式生成が速く、異常値の混入があっても精度が低下し難い車両制御因子特定用回帰式の生成方法を提供する。
【解決手段】サンプルデータ分割ステップにおいて、サンプルデータを複数のグループに分割し、回帰式生成ステップにおいて、第1のグループについては回帰式を生成し、第2以降のグループについては既存の回帰式に対する誤差を算出し、当該誤差について回帰式を求め、回帰式加算ステップにおいて、前記回帰式生成ステップで求められた回帰式と既存の回帰式(存在する場合)とを加算して新たな回帰式とする。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
分散モデル同定
【課題】分散モデル同定に関して、局所的方法及び大域的方法の双方の利点を組み合わせるとともに、付加的な利益を提供する新たな方法を提供する。
【解決手段】分散モデル同定は、複数のブロックのそれぞれによって受信される値の置換信号値(sig)を生成する信号発生器を用いて複数のブロックの各入力ポートを増強することによりすべての信号リンクを弾性リンクに置き換えることによって達成することができる。その後、受信値と置換信号値との間の差分を計算して、弾性リンクの弾性を制御する補助信号として出力することができる。次に、パラメーターの大域的同定の代わりに、局所データに基づいてブロックパラメーターが局所的に同定される。同時に、補助出力信号はゼロにならざるを得ない。その結果として、発見された解は、大域的同定方法300の解ともなる。
(もっと読む)
多変数制御装置
【課題】制御プロセスの一部分として操作値軌跡を生成するために、モデル予測制御モデル(MPC)を使用し、被制御システムのシステムモデルの反復有限区間最適化を決定する1つまたは複数の物理的構成要素を有する被制御システムの予測モデル制御の方法およびシステムを提供する。
【解決手段】時間tにおいて被制御システム100の現在の状態をサンプリングし、操作変数MV軌跡を最小化する費用関数が将来の比較的短い時間区間の間にMPCモデルを用いて計算され、MPCは最適解を見つけるために二次計画(QP)アルゴリズムを使用し、QPアルゴリズムは、勾配射影に基づいておよびニュートンステップ射影を使用して、単純制約を有するアクティブセットソルバクラスアルゴリズムを使用して解かれる。操作値軌跡の移動が実行され、制御プロセスは、予測区間を前にシフトし続けることにより前に移動される。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の制御器で用いるパラメータを決定するパラメータ決定装置13であって、異なる特徴を有する複数の演算式の組み合わせからなるとともに、異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式の重み付けを切り替え前の制御器の状態に応じて決定し、決定した重み付けが与えられたパラメータ算出演算式を用いて切替後の制御器におけるパラメータを決定する。
(もっと読む)
制御装置のための機能パラメータを定める方法
本発明は、制御装置(22)のための機能パラメータ(20)を定める方法と、提示される方法が実施される制御装置(22)と、に関する。制御装置(22)は、技術システム(10)の制御のために設けられ、本方法では、少なくとも1つの目標変数がシステム挙動に対して予め設定され、機能パラメータ(20)の変更が実行され、機能パラメータ(20)に対する獲得された応答から、設定されたパラメータ(20)の評価が、予め設定された少なくとも1つの目標変数を考慮して実行される。 (もっと読む)
モデリング・システムの処理システム、方法及びプログラム
【課題】設計のためのモデリング・ツールにおいて、定量基準によりシステム表現の簡略化可能部分を自動判別する。
【解決手段】SysMLのブロックから数式が抽出され、または、Simulink(R)のブロック線図が微分方程式に変換され、その係数は、級数展開される。先ず、微分方程式を、CASにより通常どおり解きその解も、好適には級数展開される。次に、区間解析の技法により、区間係数として、CASによって微分方程式を含む数式を解く。区間解析の結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数を0にして、CASによって微分方程式を含む数式を解く。そこで再度、結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数の項を微分方程式から落とし、微分方程式を簡易化する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の周波数を実際の周波数と異なる周波数であると誤認識した場合であっても疑似振動の周波数を制振すべき振動の周波数に合わせて適応制御アルゴリズムの適応性を向上させ、制振性および安定性を向上させた制振装置を提供する。
【解決手段】適応制御アルゴリズムを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、発生した相殺振動Vi4と振動Vi3との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて周波数認識手段31により認識された周波数を位相差が無くなる方向へ補正する周波数補正手段35とを有している。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動と基準波との間の位相ズレを低減して、適応フィルタの算出時における制振安定性を向上させるとともに、制御の応答性や制振効果を向上させた制振装置を提供する。
【解決手段】適応フィルタ32fを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて相殺振動Vi4を制振すべき位置に発生させる指令たる相殺信号を生成する。そして、振動Vi3と相殺振動Vi4との相殺誤差として検出された振動と適応フィルタ32fの基準波とに基づいて相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて適応フィルタ32fの基準波の位相を補正する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の著しい変化に起因して発生させる相殺振動を大きく変化させる必要がある場合に対応して制振制御の応答性を向上させた制振装置を提供する。
【解決手段】振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、制振すべき位置において振動Vi3と相殺振動Vi4との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、振動Vi3と疑似振動Vi3’に基づき制振すべき位置に発生される相殺振動Vi4との偏差に対応する偏差情報を取得し、取得した偏差情報に基づいて偏差の増加に応じて適応フィルタ32fが収束する速度が速まるように収束係数32uを変更する。
(もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
制御装置
【課題】入出力特性が刻々と変化するプラントに対して高い制御性能を維持できる上、一部の制御出力の偏差を見かけ上0とする特定の状況下においても有利な制御入力を再現できるような制御装置を実現する。
【解決手段】第一の制御出力とその目標値との偏差の時間積分x1z及びそれ以外のものx1y、並びに、第二の制御出力とその目標値との偏差の時間積分x2z及びそれ以外のものx2yを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、第二の制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該第二の制御出力に係る状態変数x2z及びx2yについての多項式S2zx2z+S2yx2yを0とする補正制御部52とを具備する制御装置5を構成した。
(もっと読む)
21 - 40 / 162
[ Back to top ]