
Fターム[5H004GB12]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 自動車 (162)
Fターム[5H004GB12]に分類される特許
121 - 140 / 162
スライディングモード制御を用いた制御装置及び制御方法
【課題】 車両用の無段変速機等の制御に好適な、スライディングモード制御を用いた制御に関し、制御のハンチングをより確実に防止することができるようにする。
【解決手段】 無段変速機の目標変速比に応じた可動プーリの第1目標ストロークx1*を設定し、第1目標ストロークx1*に、可動プーリの実ストロークxとこの第1目標ストロークx1*との偏差e´の大きさに応じた遅れを与えて得られる第2目標ストロークx2*を用いてスライディングモード制御の切り換え関数σを設計し、この切り換え関数σに基づいてスライディングモード制御の非線形入力u´nlを演算し、演算した非線形入力を含む制御入力によりスライディングモード制御により可動プーリの位置を制御し、目標変速比状態とする。
(もっと読む)
PWM制御の状態検出装置及び方法、並びにこれを用いた自動車エンジンの防振装置

【課題】高周波及び低周波のノイズに影響されることなく、正確にPWM制御の状態を検出することのできるPWM制御の状態検出装置、及び検出方法を提供する。
【解決手段】負荷装置2を駆動する駆動装置3へ供給されるパルス幅変調された制御パルス信号Poと、フィードバック信号Pfとに基づいて、PWM制御の状態を検出するPWM制御の状態検出装置10であって、以下を備える。フィードバック信号Pfに重畳される高周波ノイズを除去する高周波除去手段13を備えると共に、制御パルス信号Poに対してフィードバック信号Pfが正常であるか否かを判定する第一判定手段11と、低周波ノイズの影響を含む可能性のある第一判定手段11の判定結果R1から低周波ノイズの影響を抑制する低周波除去手段14を備えると共に、判定結果R1に基づいてPWM制御が正常であるか否かを判定する第二判定手段12と、を備える。
(もっと読む)
可動部材の基準位置学習装置
【課題】制御軸を回転駆動することで、機関バルブのリフト量を連続的に変化させる可変動弁機構において、最小リフト位置を定めるストッパ位置に対応するセンサ出力を学習させるときに、センサ取り付け部の撓みにより学習精度が低下することを防止する。
【解決手段】最小リフト位置の学習条件が成立すると、目標リフト量を徐々に最小リフトに向けて変化させ、該目標リフト量に実際のリフト量が追従するように前記制御軸の角度を変化させることで、ストッパに突き当たるときの慣性力を小さくし、センサ取り付け部の撓みを防止する。更に、制御軸を回動させるモータの電流を制限することで、ストッパの押し付け力が過大になって、センサ取り付け部の撓むことを防止する。
(もっと読む)
内燃機関のアクチュエータの位置を特徴付けるパラメータの実際値を調節する方法
【課題】帯域幅、安定性、精度、及び堅牢性に関して制御を最適化することが可能な、アクチュエータの位置を特徴付けるパラメータの実際値を、制御器を用いて目標値に調節する方法が提供する。
【解決手段】アクチュエータ(1)の位置を特徴付けるパラメータの実際値を、制御器(11)を用いて目標値に調節するための方法において、予め定められた目標値の時間的変化が実際値の望ましい時間的変化へと変換される。第一の伝達関数は、周波数範囲の中で予め定められた目標値の時間的変化を実際値の望ましい時間的変化へ変換するために作られ、且つ一つ又は複数の因数、とりわけ遅延要素によって近似される。それ等の因数の少なくとも一つについては、非整数の冪指数が選ばれる。
(もっと読む)
ソレノイド制御装置
【課題】ソレノイド制御装置において、通電量の振幅や変位量の変動を抑えながら、磁気ヒステリシスや引っ掛かりの影響を除くことにある。
【解決手段】ソレノイド制御装置のECUは、制御信号のデューティ比を算出する際に、レール圧偏差に対して積分動作に基づく処理を行い、算出された積分項に応じて制御信号の周波数を可変する。ここで、レール圧偏差の絶対値が大きいほど積分項の絶対値は大きくなるので、積分項の絶対値が大きいほど、弁体の変位に対する磁気ヒステリシスや引っ掛かりの影響が大きく、レール圧偏差が解消されにくくなっていると推定できる。そこで、積分項に応じて制御信号の周波数を可変すれば、通電量の振幅や変位量の変動を抑えながら、磁気ヒステリシスや引っ掛かりの影響を除くことができる。
(もっと読む)
非線形特性再現装置、非線形抵抗再現装置、および非線形特性再現プログラム記憶媒体
【課題】本発明は、状態量に非線形変換を施して出力する非線形特性再現装置に関し、製品や部品の非線形な挙動や振る舞いをモデル化して再現する。
【解決手段】入力状態量の、次期標本化時期における推定観測量を入力して、次期標本化時期における出力状態量の推定値が推定観測量で規格化されてなる規格化推定値を求める非線形特性再生部と、非線形特性再生部で求められた規格化推定値に基づく非線形演算により、次期標本化時期における入力状態量を次期標本化時期における出力状態量に変換する状態量変換部とを備えた。
(もっと読む)
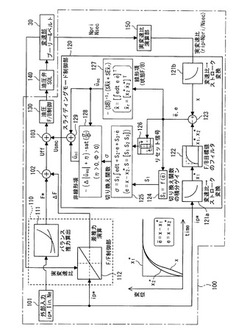
非線形ダイナミクスを有する制御対象のためのモデル化装置、非線形ダイナミクスを有する制御対象のための制御装置、非線形ダイナミクスを有する車両のための制御装置及び非線形ダイナミクスを有する制御対象のためのモデル化プログラム。
【課題】非線形ダイナミクスを有する制御対象についてモデル化を容易にし、求められたモデルを用いて非線形ダイナミクスを有する制御対象の制御を可能とすることである。
【解決手段】車両制御システム30は、大別して2つの機能及び構成に分けて考えることができる。その1つは、モデル化コンピュータ40によって実現されるもので、車両10の制御特性を模擬した模擬車両20から、制御に関するパラメータを多数収集し、それを用いて、非線形状態変数xと線形入力変数uについて
の形式で車両10のモデル化を行う。その2は、車両制御コンピュータ70によって実現されるもので、モデル化コンピュータ40によって得られた車両10のモデルを用い、実際の車両10について、姿勢制御が行われる。
(もっと読む)
プロセスモデルベースの仮想センサシステムおよび方法
仮想センサシステム(130)用の方法が提供される。本方法は、複数の検出パラメータ(306)と複数の測定パラメータ(302)との相互関係を示す仮想センサプロセスモデル(304)を確立するステップと、複数の測定パラメータに対応する一組の値を得るステップとを含む。さらに、本方法は、複数の測定パラメータに対応する一組の値と仮想センサプロセスモデルとに基づいて複数の検出パラメータの値を同時に計算するステップと、複数の検出パラメータの値を制御システム(120)に提供するステップとを含む。  (もっと読む)
(もっと読む)
多入力多出力系の制御装置
【課題】多入力多出力系のモデルを高い精度で構築するとともに、計算負荷を抑えることで、内燃機関などのプラントを最適に制御すること。
【解決手段】 実機を非線形モデルで近似した精密モデル10を作成する精密モデル作成手段と、精密モデル10へ入力される複数の入力値U1(t),U2(t),・・・,Uj(t)の制約条件を設定する入力制約条件設定手段と、実機を線形モデルで近似した簡易線形モデル11を作成する線形モデル作成手段と、簡易線形モデル11を用いて、目標出力に対する最適入力を算出する最適入力算出手段と、最適入力に基づいて、制約条件を絞り込む制約条件限定手段と、絞り込まれた制約条件に基づいて、実現し得る複数の入力値U1(t),U2(t),・・・,Uj(t)の全ての組み合わせを精密モデル10へ入力する入力手段と、入力値U1(t),U2(t),・・・,Uj(t)に対応して精密モデル10から出力された複数の出力値Y1(t),Y2(t),・・・,Yk(t)を評価する評価手段と、を備える。
(もっと読む)
スライディングモード制御装置及び適正化方法
【課題】 電磁駆動弁などに対する外乱や経時変化、あるいは機差に伴うスライディングモード制御における不安定化を防止する。
【解決手段】 筒内圧外力Fclとスプリングによるポペット弁の中立位置ずれ量Dmpとの両方に応じて、操作切り替え点である吸引電流通電開始変位Aを変更する(S100)ことにより、適切な吸引電流通電開始変位Aを設定して、スライディングモード制御における不安定化を防止することができる。
これと共にブレーキ電流終了変位も筒内圧外力Fclと中立位置ずれ量Dmpとにより変更しても良い。
(もっと読む)
制御装置
【課題】 ΔΣ変調アルゴリズムまたはΣΔ変調アルゴリズムを用いることにより制御対象を制御する場合において、一方の変調アルゴリズムの入出力間での符号反転の際のむだ時間を低減することができ、制御対象の出力の目標値への収束性を向上させることができ、制御性を向上させることができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、参照入力DSMVO2の制限値DSMVO2Lを、DSMVO2<-1のときにはDSMVO2L=-1(ステップ38)、1<DSMVO2のときにはDSMVO2L=1(ステップ40)、それ以外のときにはDSMVO2L=DSMVO2(ステップ41)として算出する。そして、この制限値DSMVO2Lを、ΔΣ変調アルゴリズムに入力することより、DSM出力DSMSGNSを算出し、DSM出力DSMSGNSに応じて、酸素濃度センサ15の出力Voutを目標値Vopに収束させるように、内燃機関3に供給される混合気の空燃比を制御する(ステップ1〜13,25,26)。
(もっと読む)
PWMアルゴリズムを用いたプラントの制御装置
【課題】制御対象の非線形特性が高い場合でも、非線形特性を補償して、制御対象の出力の振動を抑制することができるプラントの制御装置を提供する。
【解決手段】本発明は、PWMアルゴリズムを用いたプラントの制御装置を提供する。この装置は、前記プラントの出力を目標値に制御するための仮制御入力を算出する手段と、前記仮制御入力を複数の成分に分割する手段と、前記複数の成分のうち少なくとも1つをPWM変調する手段と、前記PWM変調された成分と、他の成分を加算して前記プラントへの制御入力を生成する手段と、を有する。この装置により、PWM変調によるプラントの非線形特性の補償能力を維持しつつ、入力変動を最小化することができる。これにより、仮制御入力が大きく変化するプラントにおいても、出力が振動的になることを回避でき、制御性が向上する。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】 計算量を減少させて、実タスクへ適用可能な自然方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】 制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果によりTD誤差を求め、TD誤差近似器を更新して、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
パラメータ設定装置、パラメータ設定方法およびプログラム
【課題】 パラメータ値の最適化のための作業負担を低減することで、開発コストや各種の社会的コストを抑制できるパラメータ設定装置等を提供する。
【解決手段】 取得手段101は、パラメータのパラメータ値を変化させつつ出力結果を取得する。決定手段102は、取得手段101により取得された出力結果に基づいて、最適なパラメータ値を決定する。受付手段103は、取得手段101による出力結果の取得手順、および決定手段102による最適なパラメータ値の決定手法を定めるためのユーザの指示を受け付ける。蓄積手段104は、取得手段101により取得された出力結果を蓄積する。このパラメータ設定装置によれば、出力結果の取得手順、および決定手段による最適なパラメータ値の決定手法を定めるためのユーザの指示を受け付けるので、パラメータ値の最適化のための作業負担を低減しつつ種々のシステムに対応できる。
(もっと読む)
サーボ制御装置
【課題】 積分演算を含むサーボ制御を行う際に、外乱による影響を抑える。
【解決手段】 制御対象の状態を表す物理量に対して積分演算を行う際に、正積分演算及び負積分演算の2回の積分演算を施す。これで、制御の状況に応じて差別化された情報が得られる。そして、制御対象の状態が目標制御値になるように制御する際に、実制御値及び目標制御値に基づいて、正積分演算または負積分演算のどちらから得られた積分値を用いるかを選択する。これにより、位相遅延を含めていると判断された制御パラメータが除去される。したがって、全体の制御における位相遅延が抑えられることになり、例えば適切な操舵支援制御を行うことができる。
(もっと読む)
能動型防振装置
【課題】低コスト化を図りつつ確実に加振器17の不動作異常を検出することができる能動型防振装置1を提供する。
【解決手段】能動型防振装置1は、車両特定部位の振動を能動的に抑制させるように適応制御法により少なくともフィルタ係数ゲインaを更新して、フィルタ係数ゲインaを用いた周期性制御信号yを生成する適応制御部15を備える。さらに、適応制御部15を非制御状態から制御状態へ切り替えた場合に、適応制御部15により更新されるフィルタ係数ゲインaの変化率に基づき、加振器17の不動作異常を判定する異常判定部193を備える。そして、フィルタ係数ゲインaの変化率が連続的に小さくなっている場合には、加振器17は正常と判断し、連続的に小さくなっていない場合には、加振器17は不動作異常と判定する。
(もっと読む)
制御装置
【課題】制御対象の非線形特性および周波数特性の少なくとも一方が変化したときでも、制御分解能および制御精度をいずれも高いレベルに維持することができる制御装置を提供すること。
【解決手段】位相制御入力Ucainによりカム位相Cainを制御する制御装置1は、2つのコントローラ102,103を備える。2自由度応答指定型コントローラ102では、追従制御入力Rsldが、カム位相を目標カム位相Cain_cmdに追従させるように制御するための値として算出される。DSMコントローラ103では、追従制御入力Rsldを変調することにより、位相制御入力Ucainが算出されるとともに、その際、位相制御入力Ucainの演算周期が、エンジン回転数NE、カム位相CainおよびバルブリフトLiftinに応じて、2つの演算周期ΔT1,ΔT2の中から選択される。
(もっと読む)
制御装置
【課題】一時的に極めて強い非線形特性を示す制御領域と、非線形特性をほとんど示さない制御領域とが存在するプラントを制御する場合でも、制御の分解能および制御精度を向上させることができる制御装置を提供する。
【解決手段】燃料供給装置10の燃料圧Pfを制御する制御装置1は、ECU2を備える。ECU2は、目標燃料圧Pf_cmdを設定し、燃料圧Pfを目標燃料圧Pf_cmdに収束させるように制御するための第1制御入力Rsldを、式(1)〜(6)により算出し、第1制御入力Rsldを式(11)〜(31)で変調することにより、第2制御入力Udsmを算出し、フューエルカット運転中または減圧制御中であるか否かに応じて、第1制御入力Rsldおよび第2制御入力Udsmの一方を制御入力Upfとして選択する。
(もっと読む)
制御可能ユニットの制御方法
本発明は、制御可能ユニットの制御方法に関するものであり、特には、自動車の変速機に関する。ここでは、分配オブジェクト(LO_1、LO_2、LO_3、LO_4、LO_i)の、異なったあるいは多数の異なった分担(BE_1、BE_2、BE_3、BE_4、BE_i)が、少なくとも一つの状況量(BG)を形成するために考慮される。ここで、少なくとも二つの異なった分配オブジェクト(LO_i)が設けられる。それによって、状況量(BG)の決定のために各分担(BE_i)が測定される。計数器(Z)が設けられ、そこに全ての分配オブジェクト(LO_i)の分担(BE_i)が提供される。当該計数器(Z)は、計量(G_i)を利用して各分担(BE_i)を評価し、当該分担を評価手段(A)に送信する。当該評価手段(A)は、評価された分担(GBE_i)を用いて、状況量(BG)を決定する。本発明方法による制御可能ユニットの制御のための制御要素(7)、及び、当該制御要素(7)を備えたユニットもまた、開示される。  (もっと読む)
(もっと読む)
121 - 140 / 162
[ Back to top ]