
Fターム[5H004GB13]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 航空機 (20)
Fターム[5H004GB13]に分類される特許
1 - 20 / 20
多数の自由度系の思考可能なハンズフリー制御
差し迫った制御不安定性の検出
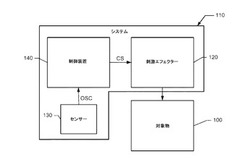
【課題】対象物に刺激を与えるシステムにおいて、差し迫った制御不安定性を検出してこれを回避する方法を提供する。
【解決手段】システム110は、刺激エフェクター120により対象物100に刺激が与えられている間にセンサー130により対象物の発振を示すシステムパラメータを表すパラメータ信号OSCを測定する。制御装置140はパラメータ信号の選択された周波数帯における支配的なトーンの最大振幅を監視し、最大振幅が指定された期間にわたって持続する場合、制御不安定性を回避する信号CSを刺激エフェクター120に与える。
(もっと読む)
宇宙船の姿勢維持方法、制御モジュールおよび変位補正力の決定方法

【課題】この発明の実施の形態は、少なくとも1つの変位方向に対して変位した姿勢への宇宙船の変位に応じて宇宙船の編隊を維持する方法を開示する。
【解決手段】この発明の実施の形態は、少なくとも1つの変位方向に対して変位した姿勢への宇宙船の変位に応じて宇宙船の編隊を維持する方法を開示する。ここで、宇宙船は、補正力を発生するコマンドを生成することにより、補正力を発生するように、構成される。補正力は、宇宙船を変位方向に対して変位した姿勢に維持するように構成された基本力と、変位した姿勢での宇宙船の変位方向に対する編隊維持を最適化するように構成された余裕力との和の関数として決定される。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
モデリング・システムの処理システム、方法及びプログラム
【課題】設計のためのモデリング・ツールにおいて、定量基準によりシステム表現の簡略化可能部分を自動判別する。
【解決手段】SysMLのブロックから数式が抽出され、または、Simulink(R)のブロック線図が微分方程式に変換され、その係数は、級数展開される。先ず、微分方程式を、CASにより通常どおり解きその解も、好適には級数展開される。次に、区間解析の技法により、区間係数として、CASによって微分方程式を含む数式を解く。区間解析の結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数を0にして、CASによって微分方程式を含む数式を解く。そこで再度、結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数の項を微分方程式から落とし、微分方程式を簡易化する。
(もっと読む)
制御及び推定のための線形モデルのリアルタイムスケジューリング
【課題】制御及び推定のための線形モデルのリアルタイムスケジューリングを提供する。
【解決手段】選択した動作点におけるまたは所望のデータからの関心対象の物理的システムの非線形算定モデルの線形化によって関心対象の物理的システムに関する1組の線形モデルをオフライン決定し(12)、線形モデルの残留組を提供するために各線形モデルの正確性をオフライン解析し不正確な線形モデルをこれから排除し(14)、該線形モデルの残留組に基づいて1つまたは複数のルックアップテーブルの格子点に対応する線形モデルをオフライン作成し(19)、ルックアップテーブル格子点を選択したスケジューリング変数とオフラインで関連付けし(19)、オフライン作成された物理的システムに関する線形モデルによって線形モデルのオンラインスケジューリングに関する原則が形成されるように、物理的システムに関するアルゴリズム型ソフトウェアをそこから作成する。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
カルマンフィルタを用いて動的モデルの状態を初期化するためのシステム及び方法
【課題】 ガスタービンエンジンを制御する適応制御システム及び方法の提供。
【解決手段】 カルマンフィルタその他同種のフィルタを用いて、動的モデルの状態を初期化するためのシステム及び方法を提供する。制御方法は、エンジン(110)の現在の状態に関する動的情報(Y)を得る段階と、動的情報(Y)の少なくとも一部を用いてエンジンモデル(130)を初期化する段階であって、動的情報(Y)に少なくとも部分的に基づく1以上の値をエンジンモデル(130)に入力する段階と、上記1以上の値に少なくとも部分的に基づいて、モデル(130)からエンジン(110)の現在の状態を求める段階と、エンジン(110)の状態に少なくとも部分的に基づいて、エンジン制御動作を求める段階と、エンジン制御動作を実行するための制御コマンド(U)を出力する段階とを含む。
(もっと読む)
非ホロノミック推進体の制御方法
【課題】非ホロノミック拘束を利用した水中推進体のアイデアはあったが、アクチュエータを減らしても制御が難しくなり性能も劣化するためアクチュエータ低減のメリットがそれに見合わない場合が多く、現在までにこのような推進体の実用化例はない。
本発明は、このような問題点を解決しようとするものである。
【解決手段】非ホロノミック拘束を利用した推進体の運動制御について、独自の工夫を加えて従来の非ホロノミック推進体の制御に代わる新しい最適制御則を導いた。1つのスクリューのみを有する円筒状の水中推進体に適用し、スクリューによる推力の大きさと±符号のみを制御することで3次元空間の任意の位置へ移動できるような制御則を見出した。これにより推進体のコストと信頼性を大幅に改善できる。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
コントローラ
少なくとも部分的な自律性をもって、センサ測定データに基づきシステムの状態を完全に判断することが不可能である環境におけるシステムの状態を示す複数のセンサから受け取られた測定データに基づいて、前記システムを制御するように動作するコントローラが提供される。前記コントローラは、前記システムの動的進化のための確率の少なくとも1つの集合と、前記システムの前記複数のセンサのための対応する測定モデルとを定義するシステムモデルと、前記センサから測定データを受け取り、前記システムモデルを参照して、それぞれが前記システムの状態を表す複数のサンプルを生成するように動作する確率論的な推定器と、前記システムの考えられる状態を表す複数の考えられるサンプルのそれぞれについて、前記システムで実施される動作を定義する情報を定義する前記システムモデルに対応する規則集合と、前記確率論的な推定器の出力を受け取り、前記規則集合を参照して、前記システムで実行される1つ以上の対応する動作を定義する情報を選択するように動作する動作セレクタとを備える。 (もっと読む)
プロセスモデルベースの仮想センサシステムおよび方法
仮想センサシステム(130)用の方法が提供される。本方法は、複数の検出パラメータ(306)と複数の測定パラメータ(302)との相互関係を示す仮想センサプロセスモデル(304)を確立するステップと、複数の測定パラメータに対応する一組の値を得るステップとを含む。さらに、本方法は、複数の測定パラメータに対応する一組の値と仮想センサプロセスモデルとに基づいて複数の検出パラメータの値を同時に計算するステップと、複数の検出パラメータの値を制御システム(120)に提供するステップとを含む。  (もっと読む)
(もっと読む)
磁力支持天秤装置における低周波域ゲイン倍加制御
【課題】 本発明の課題は、磁力支持天秤装置においてシステムの安定性を損なうことなく、空気力または流体力により加振された模型揺動を小さくする制御手法を開発して提示することにある。
【解決手段】 本発明の制御システムは、磁気力によって物体を空間に支持する装置のフードバック制御系において、センサーで検出した物体の位置情報から高周波成分を除去するローパスフィルターと、該ローパスフィルターの出力を入力する二重位相進み手段と、前記二重位相進み手段の出力信号を目標設定値に対して減算する手段とを備え、既存のフィードバック制御系よりも低周波域の制御性能を向上させるようにした。
(もっと読む)
脅威対象がある状況下での地形追随飛行用の軌道を自動的に生成する混合整数線形計画法
【課題】地形に沿って飛行し、障害物及び多数の脅威対象を避ける航空機飛行軌道を生成する方法を提供する。
【解決手段】乗物の経路を計画する方法は:乗物の動力特性を表す第1の複数の制約条件を決定する工程と;障害物との衝突を表す第2の複数の制約条件を決定する工程と;脅威対象についての視認性を表す第3の複数の制約条件を決定する工程と;混合整数線形計画法について第1、第2、第3の複数の制約条件を用いて、障害物及び脅威対象を含む環境下で、開始地点から目的地点まで乗物についての軌道を生成する工程を有する。
(もっと読む)
モデル同定装置およびモデル同定プログラム
【課題】 モデルを同定するためのデータと同一のデータを用いて次数を決定することが可能となるとともに、複数のモデルの相対評価を必要とすることなく、モデルに対するモード解析を行うことで客観的に最適な次数を決定する。
【解決手段】モデル同定装置2には、モード解析手段11、半共振周波数抽出手段12および次数決定手段13が設けられ、モード解析手段11は、任意に設定された次数に対する差分方程式のモード解析を行い、半共振周波数抽出手段12は、モード解析手段11によるモード解析結果に基づいて、特性不明システム1の最も低い反共振周波数を抽出し、次数決定手段13は、反共振周波数抽出手段12にて抽出された反共振周波数とサンプリング周波数との比に基づいて、入力信号u[n]と応答信号y[n]との関係を表す差分方程式を最小二乗法にて導出するための次数を決定する。
(もっと読む)
モデル同定装置およびモデル同定プログラム
【課題】 データ数や数値演算量の増大を伴うことなく、周波数帯域を分割しながら周波数応答特性を計算することが可能となるとともに、間引きを行うためのサンプリング周波数と周波数帯域の分割位置を客観的に一意に設定した上で、分割して得られた周波数応答特性を結合させたり、モードの数を考慮した帯域分割を行ったりすることなく、伝達関数を同定する。
【解決手段】 サンプリング手段13は、複数の入力信号uに対する応答信号yの組に対し、データ数がすべての組に対して等しくなるように各組ごとに異なるサンプリング周期で間引いてサンプリングし、パルス伝達関数同定手段16は、複数個の周波数応答特性に基づいて、そのすべての周波数応答特性を表すことができる測定時のサンプリング周期での1つのパルス伝達関数を同定する。
(もっと読む)
再発性ローカル学習機械を使用するシステム状態モニタリング方法及びその装置
所定のシステムの基準データ観察を使用して、そのような観察の基準集合(102)を展開する。次に、後続の観察(一実施形態で、現在の観察を含む)(107)を使用して、この基準集合の一部の選択を容易にして、モデルとして働く、観察の結果集合(118)を作る。次に、このモデルを、実際のシステムパフォーマンスと比較して使用して、たとえば、障害状態に向かう傾向を検出することができる。好ましい手法によれば、このモデルは、時々再計算され、特定の実施形態によれば、現在の観察の新しい集合ごとに再計算される。 (もっと読む)
電動機駆動システム用のセンサレス制御方法および装置
拡張カルマンフィルタ(330)を使用して初期回転子位置を予測し、その後回転子位置および/または速度を様々なタイプの負荷条件下で正確に予測する方法および装置が、電動機(106)のための状態オブザーバ制御システム(600)を提供する。初期回転子位置の様々な設定から、推定回転子位置/速度を出力としてもたらすことができる、制御システムモデル(300)が生成される。制御システムモデル(300)は、EKF(拡張カルマンフィルタ)推定器(330)と、速度コントローラ(322)と、電流コントローラ(324)と、可変負荷構成要素(310)とを含む。動作中、EKF推定器(330)は、速度および電流コントローラ(322、324)とフレーム変換(326、328)からの入力によって生成された基準電圧(402、404)および基準電流(1325)に基づいて、回転子速度(327)および位置(333)を推定する。さらに、基準電圧および基準電流(402、404、1325)は、システム(600)内のフィードバック信号(418、346)として、かつ電動機負荷(602)に印加する電力を制御するための駆動信号として使用されるように、フレーム変換される。  (もっと読む)
(もっと読む)
適応空気熱力学エンジンモデル
【課題】 エンジン性能の熱力学的および機械的な影響と、長期使用の部品の効率低下とを明らかにする空気熱力学エンジンモデルを提供する。
【解決手段】 複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応効率変更関数とを組み込んだ適応空気熱力学エンジンモデル20を開示する。複数のデータポイントに関して、定常状態作動時に、複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定し、対応する効率変更関数を用いて各公称部品効率を繰返し適応させて、各モデルエンジン作動パラメータを上記測定されたエンジン作動パラメータに夫々整合させ、上記適応された公称部品効率に基づいて、実際の部品効率を推定する。推定された実際の部品効率をエンジンモデル20に入力することによって、エンジンモデル20を適応させる。
(もっと読む)
1 - 20 / 20
[ Back to top ]