
Fターム[5H004GB14]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 輸送系 (207) | 船舶 (16)
Fターム[5H004GB14]に分類される特許
1 - 16 / 16
簡易手動自動切り替え装置
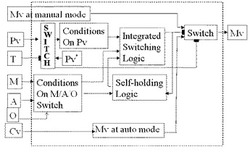
【課題】手動自動切り替え装置に関し、断線時の切り替え時に安全性を確保し、自動化制御・運転操作全体が簡素化でき、装置の適用分野を拡大できる。
【解決手段】1)手動自動切り替えスイッチの前の正規化ゲイン設定機能によって、固有周波数等の時間に関する第1正規化を行い、手動自動切り替えスイッチの後の正規化ゲイン設定機能によって、プロセスゲイン等のプロセス量に関する第2正規化を行うように振り分ける。2)プロセス量が閾値を超えたときの処理方式として従来の高負荷(高速)運転系や系統連係時のような群運転系における手動移行時操作量保持処理以外に、低負荷(低速)運転系や単独運転系や条件によって適正モードが異なる系などに対する操作量遮断処理によるプロセスの自動遮断モードの条件選択機能も設ける。3)実機においても、実施例のようなシミュレーションによる確認が行えるテストモードを有する手動自動切り替え機能を設ける。
(もっと読む)
制御装置

【課題】より簡単な構成で目標入力に対し確実に追従可能な制御装置を提供する。
【解決手段】目標値rzと制御対象11の出力とに基づく第1操作量を制御対象11に与えるフィードバック制御器21と、目標値rzに基づく第2操作量を制御対象11に与えるフィードフォワード制御器31とを備え、j型(jは1以上の正整数)の制御系を生成する場合に、フィードフォワード制御器31が、目標値rzから前記制御対象11の出力と目標値rzの偏差までの伝達関数の分子の(j−1)次項以下の各項の係数をそれぞれゼロとするような制御要素を有している制御装置を提供する。
(もっと読む)
能動適応ジャイロスタビライザー制御システム
歳差情報だけに基づいて海洋船舶の運動を安定化するためのジャイロスタビライザー制御システム及び方法。制御システムは自動利得制御(AGC)歳差コントローラ(60)を用いる。システムはジャイロフライホイール(12)に可能な限り大きな歳差−歳差が大きくなるほど、ロール安定化モーメントが大きくなる−を発現させるように、常に漸進的に最小化される利得因子を用いて動作する。この連続利得変化により、海況及び航行状態の変化への適応が与えられる。システムは最大歳差に到達する確度を有効に予測する。このイベントが検出されると、制動歳差トルクを与えるため、利得が急速に高められる。イベントが過ぎてしまうと、システムは再び利得を漸進的に低下させようとする。 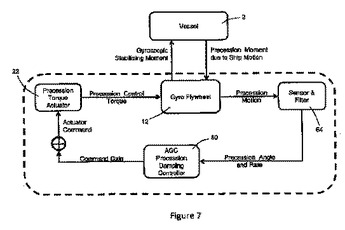 (もっと読む)
(もっと読む)
自動操舵装置及び方法
【課題】無駄な舵取り量の発生を抑えて省エネルギーの効果を高めることができる自動操舵装置及び方法を提供する。
【解決手段】予め設定されたバッチ区間B1,B2毎に船体運動モデル及び制御ゲインを更新しつつ、バッチ区間よりも短い制御周期毎に針路偏差を解消し得る命令舵角を求めて航走体の針路を自動制御する自動操舵装置及び方法であって、バッチ区間B1からバッチ区間B2に切り替わる直前のバッチ終了期間T1内における針路偏差及び命令舵角を記憶し、バッチ区間B1からバッチ区間B2に切り替わったときに、船体運動モデル及び制御ゲインを更新するとともに、記憶した針路偏差及び命令舵角と更新した船体運動モデルとを用いて状態変数を更新し、更新した制御ゲインと更新した状態変数とを用いて新たなバッチ区間B2における命令舵角を求める。
(もっと読む)
操舵制御装置
【課題】周波数特性の解析等の複雑な処理を用いなくとも、制御に起因する発振状態と周期的なヨーイングとを正確に区別することができる操舵制御装置を提供する。
【解決手段】方位センサ12は、船首方位θHを検出し、ロール角センサ15は、ロール角を検出する。加算器13は、方位設定部11から出力された目標方位θrから船首方位θHを差分して偏角θ=θr−θHを求める。制御状態監視部14は、偏角θおよびロール角の時間的変動を監視する。制御状態監視部14は、偏角θが周期性を有し、かつロール角が周期性を有する場合、発振状態ではない(外乱の影響により周期的なヨーイングが発生している)と判断し、制御部16の制御パラメータを上昇させる。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の前記制御器で用いるパラメータを決定するパラメータ決定装置であって、異なる特徴を有する複数の演算式の組み合わせからなり、該異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式を用いることにより、切替後の制御器において使用されるパラメータを決定する。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
浮体と船の相対位置制御方法及び同システム
【課題】洋上プラットフォームの運動に応じてシャトルタンカーを安全領域の中で稼動できるように制御すること等が可能な浮体と船の相対位置制御方法及び同システムを提供すること。
【解決手段】シャトルタンカー1000周りの環境状況を検出する各種センサ200と、環境状況とこの環境状況により船体に働く環境外力の関係を予め算出して蓄えた外力データベース10と、各種センサ200の検出結果と外力データベース10のデータに基づいて船体に働く外力を評価する外力評価手段20と、外力が最少になるように船首方位を最適化する船首方位最適化手段30と、この出力に基づいて少なくとも目標とする浮体構造物2000に対する船首方位を制御するダイナミックポジショニング制御装置500とを備えて構成される。
(もっと読む)
線状構造体位置制御システム、線状構造体の位置制御方法及び移動構造体制御システム
【課題】掘削船から延びるライザー管のリエントリ作業を短時間に効率よく行う。
【解決手段】掘削船から延びるライザー管のリエントリ作業を行う際、ライザー管の掘削船に対する傾斜角度と、ライザー管の下端の位置と、掘削船の現在の位置の情報とを計測し、計測した傾斜角度の情報と、下端の位置の情報と、掘削船の現在の位置の情報とに基づいて、指定された掘削船の指定位置に対するフィードバック制御信号を生成し、このフィードバック制御信号を、掘削船に搭載された位置制御装置に供給する。
(もっと読む)
カルマンフィルタを用いて動的モデルの状態を初期化するためのシステム及び方法
【課題】 ガスタービンエンジンを制御する適応制御システム及び方法の提供。
【解決手段】 カルマンフィルタその他同種のフィルタを用いて、動的モデルの状態を初期化するためのシステム及び方法を提供する。制御方法は、エンジン(110)の現在の状態に関する動的情報(Y)を得る段階と、動的情報(Y)の少なくとも一部を用いてエンジンモデル(130)を初期化する段階であって、動的情報(Y)に少なくとも部分的に基づく1以上の値をエンジンモデル(130)に入力する段階と、上記1以上の値に少なくとも部分的に基づいて、モデル(130)からエンジン(110)の現在の状態を求める段階と、エンジン(110)の状態に少なくとも部分的に基づいて、エンジン制御動作を求める段階と、エンジン制御動作を実行するための制御コマンド(U)を出力する段階とを含む。
(もっと読む)
移動体等の制御装置及び方法
【課題】外乱状況によらず制御内容の評価を適正に行い、以って適切に制御パラメータを最適化する。
【解決手段】挙動検出部50により判断される所定挙動の時間範囲毎に、基準制御パラメータ記憶部70から読み出される基準制御パラメータに所定の変更を加え、変更が加わった基準制御パラメータに従って制御対象に関する制御量を制御する。特徴ベクトル算出部52は、各時間範囲内の制御量に基づいて、該時間範囲における制御の特徴を示す特徴ベクトルPnを算出する。そして、算出される特徴ベクトルに基づいて、特徴ベクトルデータベース58の記憶内容を更新する。また、特徴ベクトル抽出部56は、算出される特徴ベクトルPnとの類似度に基づいて、特徴ベクトルデータベース58に記憶される特徴ベクトルのうち1つである特徴ベクトルPwinを選出する。そして、それら特徴ベクトルが特徴を示す制御の評価値En,Ewinに基づいて制御の改善量ΔEnを算出し、該改善量ΔEnに応じて基準制御パラメータK0を更新する。
(もっと読む)
非ホロノミック推進体の制御方法
【課題】非ホロノミック拘束を利用した水中推進体のアイデアはあったが、アクチュエータを減らしても制御が難しくなり性能も劣化するためアクチュエータ低減のメリットがそれに見合わない場合が多く、現在までにこのような推進体の実用化例はない。
本発明は、このような問題点を解決しようとするものである。
【解決手段】非ホロノミック拘束を利用した推進体の運動制御について、独自の工夫を加えて従来の非ホロノミック推進体の制御に代わる新しい最適制御則を導いた。1つのスクリューのみを有する円筒状の水中推進体に適用し、スクリューによる推力の大きさと±符号のみを制御することで3次元空間の任意の位置へ移動できるような制御則を見出した。これにより推進体のコストと信頼性を大幅に改善できる。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
プロセスモデルベースの仮想センサシステムおよび方法
仮想センサシステム(130)用の方法が提供される。本方法は、複数の検出パラメータ(306)と複数の測定パラメータ(302)との相互関係を示す仮想センサプロセスモデル(304)を確立するステップと、複数の測定パラメータに対応する一組の値を得るステップとを含む。さらに、本方法は、複数の測定パラメータに対応する一組の値と仮想センサプロセスモデルとに基づいて複数の検出パラメータの値を同時に計算するステップと、複数の検出パラメータの値を制御システム(120)に提供するステップとを含む。  (もっと読む)
(もっと読む)
制御装置および制御方法
【課題】
制御対象の制御動作を継続している間に制御パラメータが急激に切り替えられた場合であっても、操作量(制御器出力)が適切に出力される制御装置および制御方法を提供する。
【解決手段】
目標値と初期状態量と制御パラメータとが供給され、前記目標値と前記制御パラメータと過去の制御器状態量に対応して現在の制御器状態量を計算する計算手段と、 前記現在の制御器状態量に基づいて操作量を決定し、前記操作量に基づいて制御対象を制御する制御器とを具備する制御装置を構成する。 ここで、前記計算手段は、前記制御パラメータが切替えられる条件にあてはまるかどうかを監視する。そして、切替条件にあてはまる場合は、制御パラメータを切り替えるとともに、切替え後の制御パラメータを用いて、制御器状態量を再計算する。そして、前記制御器は、その再計算された状態量を使用して操作量を計算する。
(もっと読む)
組合せ完成品用単位装置の最適化装置
【課題】 従来の問題点を解決し、使用者の選択性及び単位装置の汎用性を失うことなく、組合せ完成品としての最適な特性を得ることができる組合せ完成品用単位装置の最適化装置を提供すること。
【解決手段】 本発明に係る組合せ完成品用単位装置の最適化装置は、他の装置を組み合わせて組合せ完成品として用いられる単位装置の動作特性を制御する制御装置において、前記制御装置に、実時間で、組合せ完成品としての機能の特性を評価基準として、前記単位装置の動作特性を最適化する最適化処理部を設けたことを特徴としている。
(もっと読む)
1 - 16 / 16
[ Back to top ]