
Fターム[5H004HA03]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 圧力 (58)
Fターム[5H004HA03]に分類される特許
1 - 20 / 58
シミュレーションシステム、シミュレーション実行方法およびプログラム
車載動力プラントの制御装置
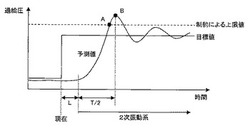
【課題】車載動力プラントの状態量に課せられた制約条件が満足されるようにリファレンスガバナを用いて目標値を整形するにあたり、状態量の将来の軌道の予測に要する演算負荷を低減する。
【解決手段】車載動力プラントの制御装置はフィードバックコントローラとリファレンスガバナとを備える。フィードバックコントローラは、特定状態量の実値を目標値に近づけるようにフィードバック制御によってアクチュエータの操作量を決定する。リファレンスガバナは、フィードバック制御にかかる閉ループ系の動特性が「むだ時間+2次振動系」でモデル化されたプラントモデルを用いて特定状態量の将来の軌道を予測し、特定状態量に課せられる制約を満足するように目標値を整形する。本制御装置によれば、リファレンスガバナにおける予測長は、プラントモデルにおけるむだ時間と2次振動系の振動周期の半分の時間との合計時間に設定される。
(もっと読む)
内燃機関の制御入力値演算方法

【課題】複数のコアが搭載されたマルチコアプロセッサを用いて内燃機関のアクチュエータの制御入力値を高速且つ高精度に演算することのできる内燃機関の制御入力値演算方法を提供する。
【解決手段】運転条件としてエンジン回転数Neと燃料噴射量Qとを検出する(ステップ100)。検出された運転条件の動作点が、運転条件格子空間上のどのセル(格子)に属するかを判定する(ステップ102)。エンジン状態量としての過給圧pimおよびEGR率egrを取得するとともに、これら状態量の各追従誤差の積分値を算出する(ステップ104)。スケジューリングパラメータρ1〜ρ4を算出する(ステップ106)。複数のコアのそれぞれにおいて、入力変数ベクトルu1〜u4をそれぞれ並列に演算する(ステップ108)。空きコアを探索し(ステップ110)、動作点での制御入力値uを算出する(ステップ112)。
(もっと読む)
適応制御装置および適応制御方法ならびに射出成形機の制御装置および制御方法
【課題】 応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置および適応制御方法ならびに射出成形機の制御装置を提供する。
【解決手段】 制御対象2から出力される制御値yに並列フィードフォワード補償器4から出力される補償値yfを加えた帰還値yaと指令値rに基づいて操作値uを出力するようにしてフィードバック制御を行う適応制御装置であって、並列フィードフォワード補償器4は、制御対象2の周波数応答特性を逐次推定する同定機構6と、当該周波数応答特性に基づいて補償値yfを調整する調整機構7とを備えている。
(もっと読む)
気相成長装置、気相成長装置の温度制御方法および温度制御プログラム
【課題】 被処理物の温度を推定し、装置内の各種状態に影響を受けない温度制御を行う。
【解決手段】 被処理物を加熱する加熱手段と、加熱手段の温度を検出する第1検出手段を有する気相成長装置であって、気相成長装置は、当該気相成長装置の状態を検出する第2検出手段と、第1検出手段で検出された温度と、第2検出手段で検出された状態に基づいて、被処理物の表面温度を推定する温度推定手段と、温度推定手段で推定した表面温度を、予め定められた目標温度になるよう加熱手段を制御する温度制御手段によって解決する。
(もっと読む)
作動中のプロセス環境における動的プロセスシミュレーションの更新と利用
【課題】オンライン・プロセスシミュレーションを行う際に該シミューレーション・システムが使い易く且つ更新し易くなる態様でプロセスプラントのプロセス制御環境に統合する。
【解決手段】開示のシミューレーション・システムによると、シミューレーション・システムにより生成されたプロセスパラメータの現在の予測値だけでなく将来的な予測値を、性能評価に利用し、並びにプラントの動作を誘導するために利用することが可能になる。また、該シミューレーション・システムは、プロセスプラントに関する様々なオンライン計測値を受信できるように作動中のプロセスプラントに接続されており、シミューレーション・システムで使用されるプロセスモデルを自動的に更新してシミューレーション・システムをプロセスプラントの実際の作動状態と協調(coordinate)した状態に保つために、これらの計測を使用する。
(もっと読む)
行列生成プログラム、方法及び装置、並びにプラント制御プログラム、方法及び装置
【課題】モデル予測制御においてプラントに対する入力を高速に算出する。
【解決手段】モデル予測制御で解くべき方程式群を代数的簡略化法を用いて、係数行列とプラントに対する最適入力ベクトルとの積が目標値及び出力状態の関数ベクトルに等しくなるように変形することで、実際のプラントでは高速に最適入力ベクトルを算出することができるため、速いダイナミクスを持つ機械系に対しても有効なほど高速に計算可能で、且つ安定的に解を求めることができるようになる。さらに、さらにプラントの状態の次元が仮に大きくなるような場合においても、大幅な計算量の増大を抑えることが可能となる
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
データ抽出装置及びデータ抽出方法
【課題】オペレータの負担なく、シミュレーションモデルのファインチューニングに適した実測データを容易に抽出できるデータ抽出装置及びデータ抽出方法を提供する。
【解決手段】 プラントの運転状況を予測してプラントの制御を行うシミュレーションモデルであって、前記シミュレーションモデルに入力する実測データのデータ抽出装置10において、特徴解析手段104は、プラントから取得した複数の実測データの時系列データの形状特性と、シミュレーションモデルから出力された状態量のシミュレーションデータの時系列データの形状特性を解析する。抽出手段106は、特徴解析手段104による解析の結果、シミュレーションデータの形状特性と最も類似する実測データを実測データベースから抽出する。
(もっと読む)
制御装置
【課題】学習値がハンチングすることの抑制と、補間処理負荷の軽減との両立を図った制御装置を提供する。
【解決手段】複数種類の変数p,Q及び制御パラメータtdを要素とした学習ベクトルを計測ベクトルに基づき補正することで制御パラメータtdを学習する学習手段と、現状の環境に即した変数である現状変数に対応した制御パラメータ(補間ベクトルTD(h)のtd)を、学習した制御パラメータTDから補間して算出する補間手段S25と、を備える。そして、前記補間手段は、複数の学習ベクトルTDの中から3つの学習ベクトルTD(A),TD(B2),TD(C2)を選択する選択手段S21,S22,S23を有するとともに、前記現状変数に対応した制御パラメータ(補間ベクトルTD(h)のtd)を、選択した3つの学習ベクトルTD(A),TD(B2),TD(C2)を含む平面Flatで補間して算出する。
(もっと読む)
圧力レギュレータ及び除振装置
【課題】下流側に流量変動が発生した場合においても、高応答かつ高精度に圧力制御を行うことができる圧力レギュレータを提供する。
【解決手段】圧力レギュレータ41は、サーボ弁11によって、気体供給源10から供給される気体の等温化圧力容器13への流入流量を規制し、等温化圧力容器13内の圧力を一定に保持する。ここで、サーボ弁11を操作する圧力制御手段(コンピュータ46)は、圧力計14で計測した等温化圧力容器13内の圧力をフィードバック制御する圧力制御系をメインループとし、その内側に、流入流量を制御する流入流量制御系を構成すると共に、圧力微分計15で計測した等温化圧力容器13内の圧力微分値に基づいて等温化圧力容器13における流入流量と流出流量との差である流入出流量差を推定するオブザーバを構成し、推定した流入出流量差を流入流量制御系にフィードバックするモデル追従制御系を構成する。
(もっと読む)
路面を塗布するシステム及び方法
【課題】より高品質の作製路面をより確実に得られるように、路面を塗布する既知のシステム及び方法を改善する。
【解決手段】路面を塗布するシステムは、1つ又は複数の調整パラメタを其々有する複数の操作部品9と、そこから調整パラメタを操作部品9に伝達する開ループ制御装置17を備える。本発明によるシステムは、測定量22を考慮に入れて、少なくとも1つの指定した目標値26を得るために、最適調整パラメタ18を決定し、複数の最適調整パラメタ18を提示する命令データセットを生成し、複数の最適調整パラメタ18を提示する当該命令データセットを開ループ制御装置17に伝達するように構成する閉ループ制御システム25を特徴とする。また、本発明は、路面を塗布するシステム、特に道路仕上げ機を制御する方法にも関する。
(もっと読む)
外科システムにおける適応フィードフォワード制御の方法
いくつかの実施形態においては、システムコンポーネントを制御するフィードフォワードを用いる方法は、フィードフォワード項がフィードフォワードテーブルにおいて受信された動作セットポイントに存在する否かを判断するステップを備え得る。フィードフォワード項が存在していない場合、システムコンポーネントは、求められるセットポイントの第一の許容値の範囲内にシステムを移行されるまでインクリメントされ得る。いくつかの実施形態においては、定常状態エラー量が決定され、第二の許容値と比較され得る。いくつかの実施形態においては、フィードフォワード項が動作セットポイントに存在している場合、システムコンポーネントは、フィードフォワード項に対応するコントローラ出力を用いて制御され得る。フィードフォワード量に対して起こり得る変化に関連する、システムに対する変化が検出されたとき、新たなフィードフォワード量が、フィードフォワードテーブル用に生成され得る。 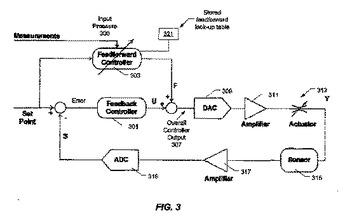 (もっと読む)
(もっと読む)
先進的プロセス制御(advancedprocesscontrol)と実時間最適化(real−timeoptimization)との経済性に基づく協調
先進的プロセス制御と製造プロセスの実時間最適化とを協調させるためのシステムおよび方法が、提供される。システムおよび方法は、制御され最適化されるべき製造プロセスに対応するプロセスデータおよび経済的データを受け取る。プロセスデータ、経済的データおよびプロセスの非線形定常状態モデルに基づいて、経済的目的関数が、実時間最適化モジュールによって計算される。その後、引き下げられた次数の、経済的目的関数の非線形近似が、実時間最適化モジュールによって計算され、先進的プロセス制御モジュールに送られる。先進的プロセス制御モジュールは、制約された経済最適に向けて製造プロセスを制御するために、引き下げられた次数の、経済的目的関数の非線形近似を使用する。 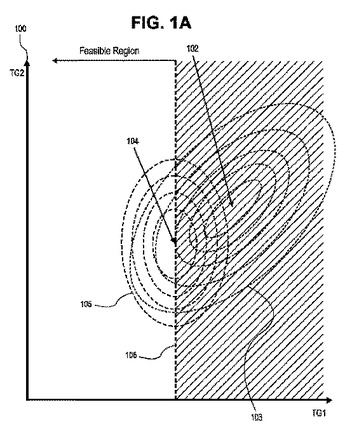 (もっと読む)
(もっと読む)
プロセス制御システムの制御ループタイミングを調整する方法及び装置
【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
PID制御装置
【課題】 制御量が周期的な変動を呈している積分プロセスにおいて、制御対象に同定用信号を与えることなく、PID制御器のチューニングを可能とする。
【解決手段】 制御対象12に操作端14から加える操作量と、検出器15で検出される制御量から、周期解析手段31で周期を求める。積分特性算出手段である簡易積分器32で積分ゲインが求められ、プロセスモデル30が生成される。制御モデル20、制御モデルのPIDパラメータを調整する評価器21と併せて制御シミュレータ16を構成し、シミュレーションによって最適なPIDパラメータを算出する。算出した制御モデルのPIDパラメータを、プロセスの要求に合わせて微調整し、制御器13の制御パラメータとして設定することができる。
(もっと読む)
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する方法および装置
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する例示の方法および装置が開示される。開示された例示の装置は、第1の接続部および電源に連結された第2の接続部を有する位置トランスミッタと、位置トランスミッタの第1の接続部に連結された少なくとも第1の接続部を含む電空コントローラと、電空コントローラの第1の接続部と第2の接続部とを連結するレジスタとを含む。 (もっと読む)
電空コントローラにおいて駆動値の変更を制限する方法および装置
電空コントローラにおいて駆動値の変更を制限する例示の方法および装置が開示される。開示する例示の方法は、制御信号およびフィードバック信号を受信することと、制御信号およびフィードバック信号から駆動値を算出することと、駆動値と以前の駆動値との差異が電空コントローラのスルー限界よりも大きいか否かを決定することと、スルー限界に基づいて算出された駆動値を変更することとを含む。 (もっと読む)
アクチュエータ制御装置、アクチュエータ制御方法及びプログラム
【課題】油圧アクチュエータを制御するアクチュエータ制御装置を提供する。
【解決手段】本発明のアクチュエータ制御装置は、作動油圧値を変更する旨の変更指示要求に応じて、この変更指示要求の作動油圧値がヒステリシス特性における移行特性の特性状態にあるか否かを判定する油圧特性判定部11と、油圧特性判定部11から得られる判定結果が移行特性の特性状態にある場合に、この移行特性について近似したモデル化移行特性に従って油圧指示値を算出する油圧指示値算出部12と、該油圧指示値を、アクチュエータを制御するための制御信号に変換する信号変換部13とを備える。
(もっと読む)
1 - 20 / 58
[ Back to top ]