
Fターム[5H004HA08]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 速度、角速度 (113)
Fターム[5H004HA08]に分類される特許
41 - 60 / 113
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 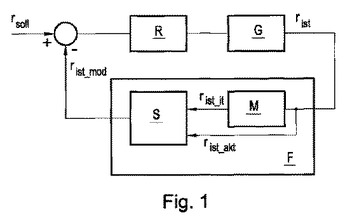 (もっと読む)
(もっと読む)
指令補間方法
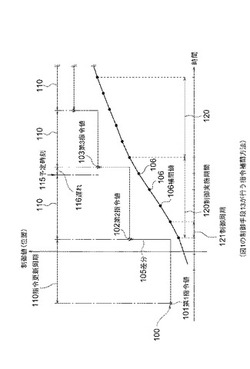
【課題】従来の指令補間方法は、制御実施期間が指令更新周期と等しく設定されているので、指令値の入力に遅れが生じた場合に制御停止期間が生じる。
【解決手段】本発明による指令補間方法は、制御周期121に補間値算出数を乗算した制御実施期間120が指令更新周期110よりも長く設定されており、第2指令値102が入力されたときから前記指令更新周期110が経過した際にも、第2指令値102と該第2指令値102の前に入力された第1指令値101とに基づく制御が行われる構成である。
(もっと読む)
制御装置

【課題】開発効率を改善することが可能な制御装置を提供する。
【解決手段】操作量としてのソレノイド駆動デューティduty_solの入力から制御量としての実トルクTaの出力までの過程が複数の制御要素としてのソレノイド駆動回路2、油圧制御部3、クラッチ4及びギヤトレーン5に区分可能な自動変速機1を制御対象とし、実トルクTaに対する目標値Ttに基づいてソレノイド駆動デューティduty_solを演算する制御装置11において、制御要素2〜5のそれぞれと対をなすように設けられ、対応する制御要素の出力から入力を逆算するように構成された複数の逆算部12〜15を具備し、目標値が逆算部12〜15にて順次逆算されてソレノイド駆動デューティduty_solが演算されるように逆算部12〜15を制御要素とは逆順で組み合わせる。
(もっと読む)
処理機械用の閉制御ループをモデル化する方法
製品ウェブを処理するための処理機械用、例えばシャフトレス印刷機用の閉制御ループ(300)をモデル化する方法において、少なくとも1つのむだ時間(Tt,SENSOR,Tt,NET,Tt,SPS,T(v)R,T(v)D)をモデル化の際に考慮する。  (もっと読む)
(もっと読む)
学習装置及び燃料噴射システム
【課題】演算処理量の減少を図った学習装置及び燃料噴射システムを提供する。
【解決手段】燃圧センサの検出波形について、その検出波形についてモデル式により表されたモデル波形の実検出波形に対する近似度を高めるよう、モデル式に含まれる複数のパラメータの値を学習する学習装置において、複数のパラメータを、そのパラメータ毎に設定された基準値に対して増大側及び減少側のそれぞれに変更し(S52)、複数のパラメータについて変更の組み合わせ毎に近似度を算出し(S53)、基準値における近似度ΣMが、変更後の各々の近似度Σq,Σr,Σs,Σtのいずれよりも高いとの更新終了条件を満たしていない場合に、各々の近似度のうち最も近似度が高くなっているときの変更の組み合わせを基準値として更新する(S56)。そして、更新終了条件を満たしている場合には、各々の基準値を複数のパラメータの学習値として決定する(S55)。
(もっと読む)
パラメータ同定装置およびパラメータ同定プログラム
【課題】パラメータを効率的に同定する。
【解決手段】モデル12の出力と実機10の出力波形との差を時間毎に抽出したものを得る。また、パラメータを公差範囲内にて変動させた場合のモデル出力の上下限を時間毎に抽出したものを得る。得られた2つの抽出したものを比較し、パターンマッチングすることにより、誤差を効果的に減少させることができるパラメータを抽出する。そして、抽出されたパラメータについてさらに同定する。
(もっと読む)
回転数制御装置
【課題】計算周期を変更することによって回転数フィードバック制御を適切に行うことが可能な回転数制御装置を提供する。
【解決手段】回転数制御装置は、回転数センサの検出値に基づいて、回転体が目標回転数となるように回転数フィードバック制御を行う。計算周期変更手段は、回転数が所定値以下となった場合に、回転数が前記所定値よりも大きい場合と比較して、回転数フィードバック制御の計算周期を長く変更する。つまり、回転数が低下した際に、回転数センサの信号処理時間を伸ばした上で、回転数フィードバック制御における計算周期を擬似的に延長する。これにより、回転数が低下した際に、回転数フィードバック制御における指令値が非連続的に変化してしまうことを適切に抑制することが可能となる。
(もっと読む)
運動指令生成装置
【課題】複雑な動作条件を満足する運動指令値をリアルタイムで計算できる指令値生成装置を得るものである。
【解決手段】制御対象の動作条件が入力される入力部と、時間の関数である基本関数と前記基本関数毎に未知の重み係数を乗じて足し合わせた重み付き線形和によって運動指令値を表した線形和情報を作成し、前記動作条件に応じて前記重み係数を含む最適化変数に対する線形の等式及び不等式によって制約条件及び評価指標を表した線形計画問題を作成して線形計画問題情報として記憶する線形計画問題設定部と、前記線形計画問題情報が表す前記線形計画問題を解くことによって、前記重み係数を求める重み係数算出部と、前記線形和情報に基づき前記基本関数に前記重み係数算出部で求めた重み係数を乗じて足し合わせた重み付き線形和によって前記運動指令値を算出する指令値算出部とを備えた。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
サーボアンプ
【課題】自由度の高いゲイン調整を行うにあたって、制御系に関する深い知識を必要せず、手動による安定なゲイン調整を可能とする、サーボアンプを提供する。
【解決手段】ゲイン調整機能を備えたサーボアンプにおいて、ゲイン調整に必要なパラメータを周波数に換算して表示するパラメータ表示手段1と、制御上の制約となるパラメータ間の特定な組合せについて周波数比を表示する周波数比表示手段2を備え、周波数比表示手段2が表示した周波数比を参照してゲイン調整する。
(もっと読む)
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
移動体制御方法及び移動体制御装置
【課題】移動体の制振性能及び位置決め性能の低下を抑制する。
【解決手段】コントローラ5は、所定の駆動パターンで移動体の駆動を制御するためのものであって、移動体の位置又は速度に関する命令値に基づいて移動体のジャークパターンを生成する生成部6と、ジャークパターンを通過させて移動体の位置指令値を出力するフィルタ部7と、を備えている。ここで、コントローラ5では、ジャークパターンをフィルタ部7に通過させて位置指令値を得ることから、位置指令値において共振周波数成分等の振動を励振する周波数成分を低減させることができる。また、コントローラ5では、フィルタ部7の伝達関数から求められた遅れ時間だけジャークパターンを圧縮するように調整して、調整ジャークパターンを生成する。よって、命令値と位置指令値とを時間的に互いに一致させることができる。
(もっと読む)
サーボ制御装置
【課題】機械特性に起因する振動を低減すると共に、往復時の軌跡を一致させるサーボ制御装置を得る。
【解決手段】微分器8は、位置指令信号を微分することにより速度フィードフォワード信号を演算する。演算器10は、微分器8による演算値を微分すると共に駆動対象機械の総イナーシャを乗算する。振動抑制フィルタ41は、演算器10による演算値から機械2の共振周波数成分を減衰し、反共振周波数成分を増幅することによりトルクフィードフォワード信号を演算する。フィードバック補償部5は、位置指令信号と速度フィードフォワード信号とトルクフィードフォワード信号とに基づいて機械2を駆動する。
(もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
モータモーション用シミュレータ
【課題】プログラマブルコントローラに対して実モータを制御するための制御パラメータを容易に設定可能とする。
【解決手段】実モータ7に模擬して当該実モータに対応した性能等を有するシミュレート用モータの画素部品17a,17b,17c,…を格納するモータライブラリ画面15aと、シミュレート用のモータ制御パターンをポインティングデバイス操作でグラフィック表示画像に作成できるシミュレート用GUI画面15bと、を有したコンピュータからなり、モータライブラリ画面からシミュレート用モータを選択しかつポインティングデバイスでシミュレート用GUI画面上のモータ制御パターンに沿う操作を行うことで、そのモータ制御パターンに対応する実モータの上記モータ制御パラメータを提供することができるようになっている
(もっと読む)
ベルト駆動制御装置及び画像形成装置
【課題】無端状ベルトの回転むらを原因とする各色の位置ずれを防止することができるベルト駆動制御装置及び画像形成装置を提供する。
【解決手段】無端状ベルトの回転速度が目標速度となるように、規定の制御周期毎に、速度検出手段によって検出された無端状ベルトの速度に基づいて、ステッピングモータの単位時間当たりの駆動パルス数をフィードバック制御する回転制御手段を具備し、回転制御手段は、規定の制御周期毎にフィードバック制御するステッピングモータの単位時間当たりの駆動パルス数について、前回の単位時間当たりの駆動パルス数に対する今回の単位時間当たりの駆動パルス数の増減値である制御値を規定の範囲に制限する。
(もっと読む)
制御システム及びその調整方法
【課題】制御システムに迅速応答及び微小誤差となる時に、モータ等被制御体出力信号の超越量を減少すると共に調整の時間を減少させ、これにより制御システムの強健性を達成する。
【解決手段】被制御体により発生された出力信号を制御する制御システムを提供する。該制御システムは主制御ユニットと第1の調整ユニットと第2の調整ユニットとを備えてなり、第1の倍率及び第2の倍率の二つの重みパラメータの調整を介して制御システムの強健性、快速応答を達成すると共に、被制御体出力信号の超越量を消失又はゼロに接近させる。制御システムは目標周波数幅、低周波数干渉への抵抗及び伝達関数への追従の技術的特徴を具備し、主制御ユニット、第1の調整ユニット及び第2の調整ユニットの設計、及び第1の倍率と第2の倍率との二つの重みパラメータの調整により、実機整調の方式で上記の技術的特徴が達成される。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 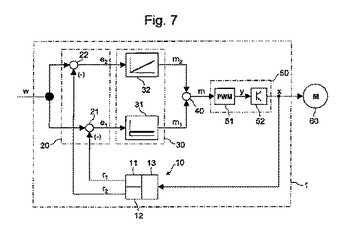 (もっと読む)
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
41 - 60 / 113
[ Back to top ]