
Fターム[5H004HA08]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 速度、角速度 (113)
Fターム[5H004HA08]に分類される特許
61 - 80 / 113
ディジタル制御装置

【課題】
オブザーバの補償ゲインおよび制御器の主要部のゲインを大きく上げることによって、外乱の影響を十分に抑制するとともに、フィードバック信号を目標指令に高速高精度に追従させることができるディジタル制御装置を提供する。
【解決手段】
ディジタルオブザーバ20を備えたディジタル制御装置において、ディジタルオブザーバ20は、制御出力と推定出力との偏差をオブザーバ補償器19に入力し、メイン操作量とオブザーバ補償器19の出力をオブザーバ制御対象18に入力し、ディジタルオブザーバ20のループに離散系における安定な極を持たせるようにオブザーバ補償器19を構成し、オブザーバ制御対象18の出力を推定出力とし、推定出力より位相進みとなる信号を位置または速度のフィードバック信号とする。
(もっと読む)
NC制御のサーボ駆動装置

【課題】 装置構成が変更された場合であっても、サーボ制御パラメータを適切に設定することができるサーボ制御パラメータの設定機能を備えるサーボ制御装置を提供する。
【解決手段】 サーボ制御を行うNC制御装置に、予め定める同一の動作パターンを周波数を変えて指令する動作パターン出力部11と、指令データと応答データとを記憶する記憶部10,12と、指令データと応答データとからゲインの周波数特性を算出する周波数特性作成部13と、作成された周波数特性の特徴を抽出する特徴抽出部14と、ゲインが予め定める範囲に入るまで、サーボ制御パラメータの値を代えるパラメータ作成部15とを設ける。
(もっと読む)
制御装置
【課題】時間的に変化する指令値に対して制御量がなるべく正確に追従するとともに、指令値が停止した後にもオーバーシュートを抑制しながら、制御量を早く整定させる制御装置を提供する。
【解決手段】制御装置は、制御対象から入力される制御量と外部から入力される指令値とに基づいて算出する操作量を上記制御対象へ出力する制御装置において、上記指令値が連続的に変化する時点において上記指令値に対して先行する予測指令値を少なくとも上記指令値に基づいて生成する予測指令生成部と、外部から入力される停止目標値に基づく制限値で上記予測指令値を制限することにより追従指令値を生成する制限器と、上記制御量が上記追従指令値に追従するように上記制御対象を制御する上記操作量を出力する追従制御部と、を備える。
(もっと読む)
運動制御システム
運動制御システム(10)は、オペレータ入力部材(20)を有するオペレータインターフェース(13)と、オペレータ入力部材に駆動連結される制御可能な力フィードバック装置(18)とを含む。運動制御システムはまた、第2の操作パラメータの目標値(TARv)と第2の操作パラメータの実際値(ACTv)との間の制御誤差(Ec)に少なくとも部分的に関係するように第1の操作パラメータを調整することを含めて、1つ以上の可動構成要素(12)の運動を調整する制御部(14)を含むことが可能である。第2の運転パラメータの目標値は、オペレータ入力部材の運動に少なくとも部分的に基づくことが可能である。制御部はまた、制御誤差に少なくとも部分的に関係するように、および制御誤差に対するフィードバック力の導関数が少なくとも部分的に制御誤差に応じて変化するように、制御可能な力フィードバック装置を操作してフィードバック力をオペレータ入力部材に提供することが可能である。  (もっと読む)
(もっと読む)
目標状態を定める方法、および、目標状態を定めるための装置
本発明は、複数の構成要素を有するシステム内の目標状態を定める方法であって、その際、システムでは、複数の構成要素の可用性に応じて優先度が異なるシステム状態が選択可能であり、最も優先度が高いシステム状態が選択可能かどうかについて検出する工程(102)と、最も優先度が高いシステム状態が選択可能である場合に最も優先度が高いシステム状態を目標状態として定める工程(104)と、最も優先度が高いシステム状態が選択可能ではない場合に、次に優先度が高いシステム状態が選択可能かどうかについて検出し(112)、次に優先度が高いシステム状態を目標状態として定める工程(114)とを含む、複数の構成要素を有するシステム内の目標状態を定める方法に関する。 (もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
シミュレーションモデルの同定方法およびそのプログラム
【課題】複数のパラメータについての外乱を考慮したモデルを同定する。
【解決手段】パラメータ(外乱)の種類iを決定し(S1)、各パラメータ毎に、残差モデルを作成する(S2)。モデル出力と実機の出力との残差を計算し(S3)、その計算結果に基づいて、複数のパラメータの外乱の大きさを同定する(S4)。このとき、1つの残差についてパラメータの種類に応じた複数の外乱モデルの大きさを同定する。
(もっと読む)
サーボモータの制御装置
【課題】速度指令あるいは位置指令のプロファイルに左右されることが少なく、滑らかな追従性あるいは整定性を発揮するサーボモータを提供する。
【解決手段】速度指令は指令前置フィルタ106を通過した後、フィードバックループ104に入力される。フィードバックループ104は、サーボモータ101に接続されたエンコーダ103の出力信号に従って、サーボモータ101を速度指令あるいは位置指令に追従するように制御する。フィードバックループ104に内包される制御パラメータの値は、パラメータ設定手段105によって剛性設定に従って設定され、同時に指令前置フィルタ106の遮断周波数もパラメータ設定手段105によって剛性設定に従って設定される。
(もっと読む)
閉ループ制御のチューニングの自動化
本発明は閉ループシステムのためのフィルタとループ比例ゲインを同時選択するための新規な装置、方法およびシステムに関するものである。本発明の1つの典型的な実施形態によれば、速度ループ補償器として知られるコントローラの一部を自動的に選択する方法が提供される。この方法は速度制御(例えばモータエンコーダ角)のフィードバックに使用されるセンサへの作動力(例えばモータトルク)からのダイナミック応答を表す周波数応答関数(FRF)に作用する。この周波数応答関数はそれぞれ対応する周波数値をもつ複素数の列として表すことができる。このチューニング方法は、安定余裕に関して規定された一連の基準を満たしつつループ比例ゲイン(Kp)の最大化を可能にするフィルタパラメータの組み合わせを決定する。積分ゲインと参照モデルを選択する方法も提示される。 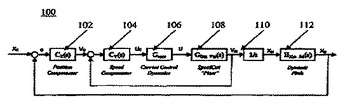 (もっと読む)
(もっと読む)
適応ノッチフィルタとそれを用いた制御装置
【課題】 幅や深さを自動的に調整し、振動している周波数が複数あっても抑制したい周波数に確実に適用でき、手動調整とも容易に併用できるノッチフィルタとそれを用いた制御装置を提供する。
【解決手段】 ノッチフィルタ周波数設定値を決定するノッチフィルタ周波数決定部(11)と、ノッチフィルタの入力および出力とノッチフィルタ周波数設定値から適応入力を算出する適応入力演算部(14)と、ノッチフィルタの入力とノッチフィルタ周波数設定値と基準信号から適応基準を算出する適応基準演算部(15)とを備え、ノッチフィルタはノッチフィルタ周波数をノッチフィルタ周波数設定値で固定とし、幅または深さまたはそれら両方が可変となっており、フィルタ係数設定部(13)は、適応入力と適応基準とを用いてノッチフィルタの幅または深さまたはそれら両方を逐次演算により決定するようにした。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】外乱抑圧機能を持つ外乱オブザーバ制御による位置決め制御装置において、外乱周波数を抑圧しても、制御特性の変更を防止する。
【解決手段】アクチュエータのモデルと外乱のモデルを含む外乱オブザーバ制御により、推定位置誤差に従い、アクチュエータの推定ゲイン(L1〜L2)と外乱の推定ゲイン(L4,L5)を用いて、アクチュエータ(1)の制御値を演算する際に、推定位置誤差e[k]に従って、外乱周波数を推定し、前記外乱周波数に対応したアクチュエータ(1)の推定ゲイン(L1,L2)と外乱の推定ゲイン(L4,L5)を変更する。外乱周波数に応じて適切なオブザーバ制御が実現できる。
(もっと読む)
モータ制御装置
【課題】 動作が制限される機械系のイナーシャを同定するモータ制御装置を提供する。
【解決手段】 動作に制限条件がある機械を駆動するモータのモータ制御装置であって、速度指令とモ−タ速度によりトルク指令を生成する速度制御部(21)と、前記トルク指令からモータを駆動するモータ駆動部(22)とを備えるモータ制御装置において、イナーシャを同定するイナーシャ同定部(24)と、前記制限条件に基づいて同定指令を生成する同定指令部(25)とを備えた。
(もっと読む)
システム同定装置およびそのシステム同定方法
【課題】 可動範囲が限定された負荷の付いた電動機のクーロン摩擦を同定することができるシステム同定装置およびそのシステム同定方法を提供する。
【解決手段】 位置から積分区間を生成する積分区間演算器(101)と、速度を入力し速度絶対値を生成する絶対値演算器(102)と、前記速度絶対値と前記積分区間から速度絶対値積分値を生成する第1定積分器(103)と、前記速度とトルク指令からトルク指令速度乗算値を生成する乗算器(104)と、前記トルク指令速度乗算値と前記積分区間からトルク指令速度積分値を生成する第2定積分器(105)と、前記速度絶対値積分値と前記トルク指令速度積分値からクーロン摩擦同定値を生成する演算器(106)を備えた。
(もっと読む)
PID制御装置および制御パラメータ更新方法
【課題】PID制御のための制御パラメータとして、個々に最適な値を設定すること。
【解決手段】PID制御装置1の生成手段42は、所定の周波数で変化する信号あるいはデータを生成する。加算手段43は、生成手段42が生成した信号あるいはデータを、目標値に基づくPID制御信号あるいはPID制御データに加算し、PID制御対象21などへ供給する。更新手段41は、PID制御対象21などによる動作の検出信号あるいはデータに含まれる、所定の周波数で変化する信号あるいはデータに基づく変化量に応じてPID制御信号を生成するための制御パラメータ36を更新する。
(もっと読む)
電動機の制御装置
【課題】状態量指令値に影響されずに機械共振を自動的に抑制すること。
【解決手段】電動機1によって駆動される負荷4の速度を速度指令値に追従させる際に、速度制御手段6の出力信号の機械共振周波数成分を通過させるHPF9と、所定周波数以下の周波数を含む基準信号を出力する基準信号発生器10と、この出力基準信号を手段6の出力信号に加算する加算器11と、この加算出力信号を入力とし、且つフィルタ係数を変化させることにより入出力特性を変更可能な仮想フィルタ12と、この出力信号が前記基準信号に近づくように仮想フィルタ12のフィルタ係数を修正する仮想フィルタ設定部14とを備えて電動機の制御装置を構成する。
(もっと読む)
時定数自動推定方法及び時定数自動推定装置並びにサーボモータ制御システム
【課題】時定数の調整に手間や時間をかけることなく、簡単な計算で容易に推定することができ、サーボモータ調整時の作業負担の軽減を図ることができる時定数自動推定方法及び時定数自動推定装置並びにサーボモータ制御システムを提供する。
【解決手段】読み込まれた動作プログラムを動作させることによって、サーボモータの加減速時の時定数を自動で推定するための時定数自動推定装置6であって、テスト運転のために予め用意してある仮時定数でサーボモータを加速動作させたときのピーク電流値を検出する電流値検出手段8と、ピーク電流値と仮時定数との関係から、本制御時にサーボモータを所望の目標電流値で実際に動作させる際の本時定数を推定する時定数推定手段9と、を備える。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
フィルタ装置、及びそれを用いたフィードバック制御装置
【課題】入力信号のうちノイズ等の無用な高周波成分を低減させながら、制御すべき周波数帯域の位相遅れが小さいフィルタ装置、及びそれを用いたフィードバック制御装置を提供することを目的とする。
【解決手段】入力信号の高周波ノイズを低減するフィルタ装置であって、入力信号を位相遅れ処理して位相遅れ信号を出力する一次遅れフィルタ部と、前記入力信号を微分処理して微分信号を出力する微分特性処理部と、前記位相遅れ信号と前記微分信号を加算して出力信号を得る加算処理部とを備えることを特徴とするフィルタ装置、及びそれを用いたフィードバック制御装置。
(もっと読む)
電動機の制御装置
【課題】物体移動系の高精度で比較的単純な数式モデルに基づいて、物体上の所望点(例えば加工点)の動作(速度、振動等)を高精度に制御できるようにする。
【解決手段】制御装置10は、物体12を移動させる電動機14を制御するものであって、物体の加速度を検出する加速度検出部16と、電動機の運転情報を取得する運転情報取得部18と、加速度検出部が検出した物体の加速度情報D1と運転情報取得部が取得した電動機の運転情報D2とに基づいて、物体の移動系Sの数式モデルMを決定するシステム同定部20と、システム同定部が決定した数式モデルを用いて、電動機の運転を制御する制御部22とを備える。システム同定部は、電動機の運転情報を操作入力とし、物体の加速度情報を観測出力として、移動系の高精度で比較的単純な数式モデルを決定でき、制御部は、そのような数式モデルを用いて、物体上の所望点の動作を適確に推定できる。
(もっと読む)
制御パラメータ決定方法及び装置
【課題】 FF+PID制御を行いオーバーフローすることなく迅速に目標値に達成するための制御パラメータを求めることのできる制御パラメータ決定装置を提供すること
【解決手段】 初期操作量ゲイン学習部3は、操作量を複数の区分に分割し、実際の制御中に取得した操作量以下の区分の存在時間を求め、閾値以上の存在時間の区分の中で最も大きい区分の操作量の下限値を求める。FFゲイン学習部4は、目標値に達した際の操作量と、制御終了時の操作量に基づいてFFゲインを求める。そして、初期操作量ゲインは、上記求めた下限値に最大操作量を掛けたものを目標値で割って得られた値と、FFゲインを比較し、大きい値を初期操作量ゲインに決定する。これにより、FF+PID制御するコントローラにおける初期操作量ゲインとFFゲインを設定する。
(もっと読む)
61 - 80 / 113
[ Back to top ]