
Fターム[5H004JA03]の内容
フィードバック制御一般 (10,654) | 設定部 (547) | 設定値が変化するもの (335)
Fターム[5H004JA03]の下位に属するFターム
設定値がプログラムされているもの (36)
Fターム[5H004JA03]に分類される特許
161 - 180 / 299
情報処理装置、情報処理方法、およびプログラム

【課題】時系列データをより正確に生成することができるようにする。
【解決手段】下位時系列生成器61のRNN71−1乃至71−Nは、センサモータ信号を学習し、その学習した結果に応じて予測したセンサモータ信号を生成する。上位時系列予測生成器62が、RNN71−1乃至71−Nが生成時に発生させる予測誤差の推定値である推定予測誤差errorPredH[N]を出力し、この推定予測誤差errorPredH[N]が、ゲート72−1乃至72−Nの開閉状態を制御するゲート信号gate[N]に変換される。合成回路73は、開閉状態が制御されたゲート72−1乃至72−Nから出力されるRNN71−1乃至71−Nの出力信号sm1(t+1)乃至smN(t+1)の総和を、時刻t+1のセンサモータ信号sm(t+1)として出力する。本発明は、例えば、ロボットなどに組み込まれる情報処理装置に適用できる。
(もっと読む)
サーボ制御装置とその調整方法

【課題】 モータ制御装置単体でかつ、自動的に応答誤差調整を行なうことができるサーボ制御装置とその調整方法を提供する。
【解決手段】 位置制御器と、積分制御を有した速度制御器と、移動方向反転からの移動量を計測する移動量測定器(204)と、移動量が所定値に達するまで前記積分制御の積分ゲインを増加させる応答誤差補償器とを有するサーボ制御装置において、モデルに基づいて理想位置を演算する位置制御モデル部(201)と、モデル位置と実際位置との偏差から応答誤差を推定する応答誤差推定器(205)と、テストプログラムを実行した前記応答誤差を低減する積分ゲイン補正部(207)とを備えた。
(もっと読む)
システム同定装置およびそれを備えたモータ制御装置
【課題】 可動範囲の限定された負荷が低剛性に連結した制御対象の剛性を、機械的負担をかけず、静かに、雑音などの影響を抑制し高精度に同定することができるシステム同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 剛性同定器107が、トルク指令振幅とモータ位置振幅に基づいて、剛性同定値を算出して出力する剛性演算器116を備え、また、剛性同定器107が、トルク指令に基づいてトルク指令振幅を算出して出力するトルク指令振幅演算部108と、モータ位置に基づいてモータ位置振幅を算出して出力するモータ位置振幅演算部112と、を備える。
(もっと読む)
適応ノッチフィルタとそれを用いた制御装置
【課題】 幅や深さを自動的に調整し、振動している周波数が複数あっても抑制したい周波数に確実に適用でき、手動調整とも容易に併用できるノッチフィルタとそれを用いた制御装置を提供する。
【解決手段】 ノッチフィルタ周波数設定値を決定するノッチフィルタ周波数決定部(11)と、ノッチフィルタの入力および出力とノッチフィルタ周波数設定値から適応入力を算出する適応入力演算部(14)と、ノッチフィルタの入力とノッチフィルタ周波数設定値と基準信号から適応基準を算出する適応基準演算部(15)とを備え、ノッチフィルタはノッチフィルタ周波数をノッチフィルタ周波数設定値で固定とし、幅または深さまたはそれら両方が可変となっており、フィルタ係数設定部(13)は、適応入力と適応基準とを用いてノッチフィルタの幅または深さまたはそれら両方を逐次演算により決定するようにした。
(もっと読む)
システム同定装置およびそれを備えたモータ制御装置
【課題】 可動範囲が限定された負荷の連結したモータの慣性モーメント、粘性摩擦、クーロン摩擦を、微少範囲で高精度に同定することができるシステム同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 システム定数同定器が、位置フーリエ係数とトルク指令フーリエ係数に基づいてシステム定数同定値を算出して出力するシステム定数演算器103を備え、また、前記システム定数同定器が、モータ位置に基づいて前記位置フーリエ係数を算出して出力する位置フーリエ変換器101と、トルク指令に基づいて前記トルク指令フーリエ係数を算出して出力するトルク指令フーリエ変換器102と、を備える。
(もっと読む)
ロボット制御装置
【課題】 コンベア等の搬送装置におけるロボットの作業対象物の移動量の変化が大きくても高速高精度な追従作業を実行可能なロボット制御装置を得る。
【解決手段】 ロボット制御装置において、搬送装置位置検出部と、搬送装置位置生成部と、搬送装置位置生成部で得られたロボットの指令値を生成する搬送装置移動量生成部と、ロボットの搬送装置に対する追従誤差を記憶しておく追従誤差記憶部と、ロボットの追従遅れを補正する追従遅れ補正量を求め、追従遅れ補正量と追従誤差記憶部に記憶された追従誤差より追従目標移動量を生成する追従遅れ補正部と、追従遅れ補正部で生成された追従目標移動量から次制御周期の追従移動量を生成する追従移動量生成部とを備えるようにした。
(もっと読む)
ディスク装置、位置決め制御回路及びそれを用いた情報処理装置
【課題】外乱抑圧機能を持つ位置決め制御系を持つディスク装置において、早期に外乱を抑圧して、ヘッドの振動を防止する。
【解決手段】ディスク装置(20)の外乱抑圧機能を有する位置決め系(14)に、外部(50)から、既知の外乱周波数を初期値にセットするためのインターフェース回路(11−1)を設けた。直ちに、未知の外乱周波数を抑圧し、又は、既知の外乱周波数からスタートし、以降、周波数が変化しても、推定周波数は、それに追従でき、早期にヘッド(3)の振動を防止できる。
(もっと読む)
プラントの制御装置
【課題】模擬モデルの作成が容易なプラントの制御装置を提供すること。
【解決手段】制御対象100に所定の操作信号16を与えたとき、制御対象100から得られる計測信号1の値を予測するモデル500と、このモデル500の予測結果であるモデル出力13が、モデル出力目標値に収斂するように、モデル500に与えるモデル入力12の生成方法を学習する学習部600と、学習部600の結果に従って操作信号15を生成する操作信号生成部300を有し、操作信号生成部300により生成される操作信号15を操作信号16とするようにしたプラントの制御装置において、計測信号1を取り込む外部入力インターフェイス210と、計測信号2の値を保存する計測信号データベース230を備え、この計測信号データベース230に保存された計測信号の平均と分散を学習部600で計算し、この平均と分散の結果を用いて操作信号生成部300により操作信号15を修正するようにしたもの。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】外乱抑圧機能を持つ外乱オブザーバ制御による位置決め制御装置において、外乱周波数を抑圧しても、制御特性の変更を防止する。
【解決手段】アクチュエータのモデルと外乱のモデルを含む外乱オブザーバ制御により、推定位置誤差に従い、アクチュエータの推定ゲイン(L1〜L2)と外乱の推定ゲイン(L4,L5)を用いて、アクチュエータ(1)の制御値を演算する際に、推定位置誤差e[k]に従って、外乱周波数を推定し、前記外乱周波数に対応したアクチュエータ(1)の推定ゲイン(L1,L2)と外乱の推定ゲイン(L4,L5)を変更する。外乱周波数に応じて適切なオブザーバ制御が実現できる。
(もっと読む)
サーボバルブの制御装置
【課題】流体圧力制御におけるダイナミックレンジの広い目標値を設定することが可能であり、非線形領域においても安定した制御特性を得ることができるサーボバルブの制御装置を提供する。
【解決手段】サーボバルブに対する制御量の目標値から所定の基準入力信号を生成して出力する設定部と、サーボバルブの制御量を検出して帰還量を出力する検出部と、設定部から出力された基準入力信号と検出部から出力された帰還量とを比較してその偏差を出力する比較部と、この比較部が出力した偏差を受けて、サーボバルブに与える操作量を出力する調節部とを具備したサーボバルブの制御装置であって、比較部と調節部との間に介挿されて、比較部が出力した偏差を基準入力信号のレベルに従って所定のレベルに調整して調節部に出力する可変利得調節部を備える。
(もっと読む)
燃焼装置を有する制御対象物の制御装置、及びボイラを有するプラントの制御装置
【課題】燃料性状の変化時にガス成分の制御性能が低下する事を抑制する制御装置を提供する事が目的である。
【解決手段】燃焼装置を有する制御対象物の計測データを入力し制御対象物への操作指令値を演算する基本制御指令演算手段と、燃焼装置へ供給する燃料の複数の燃料組成に対して、燃焼装置の操作パラメータとガス中成分のデータセットを格納する燃料データ格納手段と、制御対象物の過去の運転実績値を格納する運転実績データベースと、制御対象物の過去の運転実績値とデータセットのデータ間距離を算出し、データ間距離が最短となるデータセットを決定するデータ作成手段と、データ作成手段により決定されたデータセットを用いて、操作パラメータと燃焼装置の燃焼ガス中成分との関係をモデル化するモデル化手段と、基本制御指令演算手段の操作指令値をモデルを用いて現在のガス中成分より良い条件となる操作パラメータで補正する補正手段を有する制御装置。
(もっと読む)
プラント制御方法及びプラント制御装置
【課題】モデル構築期間が短くて優れた性能をもった強化学習法によるプラント制御方法と装置を提供すること。
【解決手段】数値解析手段6によるプラント1の数値解析結果の誤差評価により、操作条件パラメータを作成し、連続モデル修正手段12により、数値解析データを追加することで連続モデル9の誤差を低減させ、制御方法学習手段13により、プラント運転実績データベース5のデータに基づく強化学習を行って連続モデル9を修正して学習結果データベース14に入力し、基本制御指令演算手段4による制御指令に加算するようにしたもの。これにより、プラント1の試運転時から常に性能のよい制御をすることができ、制御装置の導入期間を短縮することができる。
(もっと読む)
吸収冷温水併給装置
【課題】冷却運転定格加熱量・加温運転定格加熱量間の加熱量差が大きい運転移行と、冷却主体運転・加温主体運転間の運転移行とを簡便な構成によって安定に移行させ得るようにした吸収冷温水装置を提供する。
【解決手段】吸収冷温水併給装置は温水器と高温再生器との間に設けた加温冷媒制御弁V12の弁開度γにもとづいて高温再生器の加熱量μを冷却定格加熱量μ1から加温定格加熱量μ2、または、その逆に運転移行する。冷却定格加熱量μ1・加温定格加熱量μ2間の段差を複数の段階μ1・μ2・μ3に分け、中心点φ21・φ22をずらせた複数の四角形ヒステリシスループ状の移行制御によって移行させることにより、ハンチング動作による加熱量の頻繁な変動を防止する。また、冷却主体運転・加温主体運転間の運転移行も同様に四角形ヒステリシスループ状の移行制御によって移行させることにより、ハンチング動作による加熱量の頻繁な変動を防止する。
(もっと読む)
自動調整方法
【課題】フィードバックループの自動調整方法において、制御対象の制御に要する時間を短縮し、かつ精度の向上を図るものである。
【解決手段】本発明は、Nビットの制御入力値Cによって制御される制御対象10と、制御対象10から得たフィードバック値Fと目標値Dとを比較して、その比較結果を基に制御入力値Cを更新する調整器20と、を備えたフィードバックループの自動調整方法であって、以下の特徴を有する。即ち、フィードバック値Fと目標値Dとの比較により、F≦Dである場合、制御入力値Cの複数のビットのうち更新する必要のあるkビット目を1でセットし、F>Dである場合、kビット目を0でクリアし、kビット目が最下位ビットとなるまでkをデクリメントしながら、上記比較、及びkビット目のセットもしくはクリアを繰り返す。この操作によりフィードバック値F及び制御入力値Cの発散を回避できる。
(もっと読む)
オンボード電源電圧リップルに対してロバストに電磁制御弁の電流を制御するための制御装置および方法
オンボード電源のリップルに対してロバストに自動車ハイドロリックユニット(HP)向けの電磁制御弁(CV)の電流を制御するディジタル閉ループ回路(CLS)を有し、前記閉ループ回路(CLS)の操作量として目標電流(SS)の飛び(ST)に対する動特性を改善するようにした自動車制御装置(CO)において、前記ディジタル閉ループ回路(CLS)のフィードバックパス(FB)に少なくとも1つの適応補正フィルタ(KFI)が設けられており、該適応補正フィルタのフィルタ時間(FT1,FT2)が目標電流(SS)のレベル変化(S1)に基づいて動的に調整可能である。 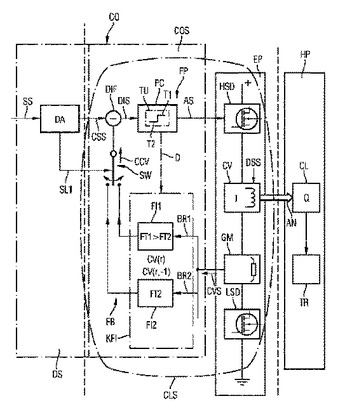 (もっと読む)
(もっと読む)
エネルギープラントの最適運用システムと方法、およびプログラム
【課題】精度の高い機器特性モデルを構築可能とし、安定した最適運用解を算出可能なエネルギープラントの最適運用システムと方法、およびプログラムを提供する。
【解決手段】冷却水温度入力部112により、プラント外部の冷却媒体温度を入力してBTGプラント100の各タービン復水器の冷却水温度を推定する。補正量算出部121により、BTGプラント100の各種プロセス量とタービン復水器の冷却水温度に基づき、復水器性能の変化による電力出力補正量を算出する。モデル構築・更新部122により、各種プロセス量と電力出力補正量に基づき、各機器の特性をモデル化して機器特性モデルを構築する。最適運用解算出部124により、各種プロセス量と、電力出力補正量、および機器特性モデルに基づき、BTGプラント100のボイラの蒸気生成量と各タービンの蒸気配分量および抽気蒸気量の最適運用解を算出する。
(もっと読む)
電空変換装置及び電空変換装置の制御方法
【課題】電空変換手段の温度変化、経年変化及び外乱によらず、圧力増幅手段の不感帯位置を正確に把握すること。
【解決手段】温度センサ16と、温度信号Onに基づくノズル背圧Pnの変化を補償し、当該補償分を温度補償信号Iaとして出力する温度補償手段22と、使用年月の経過及び外乱に基づくノズル背圧Pnの変化を補償し、当該補償分を経年変化補償信号Ibとして出力する経年変化補償手段21と、操作信号MVと温度補償信号Iaと経年変化補償信号Ibとからノズル背圧算出値Pを算出するノズル背圧算出手段19と、圧力センサ14と、偏差圧算出手段24と、ループゲイン制御手段23と、目標値信号SV及び駆動圧信号PVの差と前記ループゲイン制御手段23からの指示とに基づき操作信号MVを生成し、当該操作信号MVによりI/Pモジュール12を制御する出力制御手段18と、を備える。
(もっと読む)
廃棄物燃焼プロセスの制御
【課題】湿分が変動する廃棄物を処理する廃棄物焼却プラントの、自動化されたリアルタイム制御を可能にする。
【解決手段】廃棄物燃焼プロセスを制御するための方法及びシステムにおいて、入ってくる廃棄物水分などの、廃棄物燃焼プロセスの経時変化するプロセス・パラメータが、カルマン・フィルタに基づく、経時変化するパラメータのためのパラメータ評価アルゴリズムを介して、評価する。その評価されたプロセス・パラメータは、次に、廃棄物焼却プラントのリアルタイム制御のためのコントローラの中で、廃棄物燃焼プロセスのモデルの入力変数に対応する廃棄物供給速度などの、制御パラメータを決定するために使用する。
(もっと読む)
外力推定方法および外力推定装置
【課題】微分ノイズによる影響を最小限に抑えつつ、直流成分を含む幅広い周波数領域の外力推定値を取得する。
【解決手段】アクチュエータ1に外乱トルクτが与えられると、力単位の信号と位置信号に基づき算出された第2信号との間に偏差を生じたり、力単位の信号と加速度信号との間に偏差を生じたりして、アクチュエータ1に加わる外力を推定するような直流成分を含む低周波帯域の第3信号や、この第3信号よりも帯域の高い第5信号が各々取り出される。したがって、これらの信号成分を加算すれば、低周波帯域から高周波帯域に至る幅広い外乱トルクの推定値^τを最終的に得ることができる。
(もっと読む)
サーボ制御装置
【課題】周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減するサーボ制御装置を提供する。
【解決手段】安定補償回路106を、カットオフ周波数=繰り返し周波数×4の1次ローパスフィルタ201、カットオフ周波数=繰り返し周波数/4の1次ハイパスフィルタ202、ゲイン0.8の減衰器203を直列接続して構成し、安定補償回路106の繰り返し周波数における位相を0とすることにより、繰り返し補償回路102のピークゲイン周波数が、繰り返し周波数に一致させ、周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減することを実現する。
(もっと読む)
161 - 180 / 299
[ Back to top ]