
Fターム[5H004KB01]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013)
Fターム[5H004KB01]の下位に属するFターム
Pの使用 (314)
Iの使用 (307)
Dの使用 (209)
先行演算を行うもの (12)
2自由度を有するもの (44)
PIDパラメータのオフラインでの決定 (36)
Fターム[5H004KB01]に分類される特許
81 - 91 / 91
回転軸の制御装置
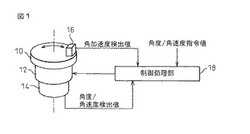
【課題】 回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止する。
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
(もっと読む)
サーボ制御装置および方法

【課題】 時間や温度ともに変化する摩擦力をより正確に求め、時間や温度の変化に依存することなく常に位置制御や柔軟制御の制御性能を高く維持することができるようにする。
【解決手段】 実制御と同一構成のシミュレーション位置制御器15およびシミュレーション速度制御器16と、制御対象を模擬したメカモデル演算部18と、実制御とシミュレーションを比較する比較部19と、比較部19の出力から摩擦モデルを生成する摩擦モデル生成部20と、摩擦モデル生成部20の出力に基づいた摩擦補償値を補償する補償部21とを備える。
(もっと読む)
制御装置
【課題】制御系としては簡素でありながら、複数の制御対象出力をフィードバックし、それぞれの出力(制御量)によりそれぞれ異なる制御対象出力目標応答算出手段を持ち、複数の制御対象出力を制御し、それぞれの最適な応答を得られる制御系を構築する。
【解決手段】フィードバックおよびフィードフォワード第1制御入力の和を参照し、第2制御量目標値設定手段により第2制御量目標値が設定され、第2制御量フィードバック制御入力演算手段により、第2制御量目標値と、第2制御量推定手段により推定または検知される第2制御量を参照してフィードバック第2制御入力が演算され、フィードバックおよびフィードフォワード第2制御入力の和を参照し、制御入力演算手段により制御入力が演算され、制御対象制御手段により、制御対象の第1および第2制御量が制御されることを特徴とする制御装置。
(もっと読む)
制御対象モデル生成装置および生成方法
【課題】時系列データの収集に要する時間と労力を削減し、制御やモデリングに関する専門的知識を不要とする。
【解決手段】制御対象モデル生成装置は、制御対象の数式モデルを記憶するモデル記憶部1と、コントローラアルゴリズムを記憶するコントローラ記憶部2と、制御系のシミュレーションを実行するシミュレーション演算部5と、実際の制御対象の制御結果から求められた実制御特徴量を記憶する実制御特徴量記憶部7と、モデル制御特徴量をシミュレーションの結果から算出するモデル制御特徴量演算部8と、実制御特徴量とモデル制御特徴量との近さを示す評価関数値を演算する評価関数演算部9と、制御対象モデルパラメータを逐次変更しながらシミュレーションを実行させ、評価関数値が最適値となる制御対象モデルパラメータを求める制御対象モデルパラメータ探索演算部10とを備える。
(もっと読む)
データ分析装置及びその方法、プログラム
【課題】 精度の高い制御パラメータの設定を効率的にかつ汎用的に実現することができるデータ分析装置及びその方法、プログラムを提供する。
【解決手段】 装置の制御パラメータを調整するための基準となる基準データに基づいて、該装置に関する観測情報及び判定情報間の関係を示すルールを満足する、前記設定値を設定するための基準情報を生成する。生成した基準情報と、装置の環境変化に応じて基準データを調整した調整過程データとに基づいて、調整対象の制御パラメータに対応する第1ルールに類似する第2ルールを推定し、その推定した第2ルールを用いて、前記調整対象の制御パラメータの設定値を設定する。
(もっと読む)
適応制御装置、その使用、この型式の制御装置を有するセンサ、及びセンサの外乱信号を自動補償する適応方法
本発明は、制御ループと、前記制御ループに配置された比較装置と、前記制御ループの入力値は、前記比較装置に供給され、前記比較装置の下流に接続された評価手段と、その評価手段は、前記比較装置の出力値を結論値に変換し、前記結論値及び前記入力値が供給され、前記比較装置に供給される補正値を発生する補正手段とを備える、センサの外乱信号を自動補償する制御装置に関する。本発明は、さらに、入力値が補正値と比較される、センサの外乱信号を自動補償する方法に関する。本発明は、同様に、本発明による制御装置を備えるセンサ、及びセンサの外乱信号を自動補償するそのような制御装置の使用に関する。 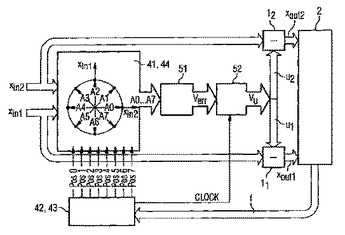 (もっと読む)
(もっと読む)
液化燃料ガスの気化器・減圧弁の制御方法と、気化器の制御装置
【課題】気化器の圧力制御および流量制御を適正に行って気化器の運転台数が不必要に変化することなく良好な台数制御が可能となり、また、流量制御時の流量調節弁も良好な制御動作が可能となると共に、各軸の起動停止、負荷遮断、所内単独等のどのケースにおいても減圧弁の出口圧力を使用圧力範囲に容易に収めることができる液化燃料ガスの気化器・減圧弁の制御方法と、気化器の制御装置を提供する。
【解決手段】本発明に係る液化燃料ガスの気化器の制御方法は、液化燃料ガスを気化させて燃料ガスを送出する気化器の運転台数または流量調節弁の制御対象として、火力発電設備の燃料流量要求指令を使用する。また、液化燃料ガスの減圧弁の制御方法は、火力発電設備にける燃料ガスの消費量に応じて変化する減圧弁の出口圧力を制御する制御対象として、火力発電設備の燃料流量要求指令を使用する。
(もっと読む)
指令パラメータ設定方法とモーション制御装置
【課題】システムの振動を低減する指令のパラメータを、簡単に決定できるようにする。
【解決手段】サーボ制御装置へ指令のパラメータを出力しモータを制御するモーション制御装置において、移動距離distと移動時間tbを入力する動作条件入力部と、振動周期tfを入力する振動入力部と、移動距離と振動周期を入力して振動低減パラメータを導出し、モータ指令計算部に出力する振動低減パラメータ導出部と、振動低減パラメ−タを入力してモータ指令を生成しモータ指令出力部に出力するモータ指令計算部と、モータ指令をサーボ制御装置に出力するモータ指令出力部とを備え、振動低減パラメータ導出部は動作条件と振動周期の比xを求め、予め求めておいた関数F(x)にx=tb/tfの値を代入して指令のパラメータを決定する。
(もっと読む)
適応型空間ノッチフィルタ
生産システム内で回転要素の角速度の変化に従って適応する空間ノッチフィルタを記述する。生産システムにおいて、構成要素やセンサーの欠陥等、システム内に空間的に分布する物理特性に起因してフィードバック信号にノイズが現れる場合がある。このノイズは、システムの回転要素の角速度が変化するにつれて変化する周波数帯域に集中する場合がある。本発明は、1個以上のノッチフィルタを用いてノイズをフィルタリングして、ノッチフィルタの中心周波数を角速度の関数として適応させる技術を提供する。ノイズ周波数が変化した場合に、ノッチフィルタの中心周波数がノイズを追跡する。  (もっと読む)
(もっと読む)
変調アルゴリズムを用いたプラントの制御装置
【課題】非線形特性の強いプラントに対して十分に非線形特性を補償し、また、制御量の変動が大きいプラントに対しても、追従性、安定性を満たす制御手法を提供する。
【解決手段】本発明は、変調アルゴリズムを用いたプラントの制御装置を提供する。この制御装置は、プラントの出力を目標値に制御するための仮制御入力を算出する手段と、仮制御入力を複数の成分に分割する手段と、複数の成分のうち少なくとも1つを変調する手段と、変調された成分と、他の成分を加算して制御入力を生成する手段と、を有する。これによって、従来の変調アルゴリズムによるプラントのフリクションやヒステリシスなどの非線形特性の補償能力を維持しつつ、変調による入力変動を最小化できる。このため、仮制御入力が大きく変化するようなプラントにおいても、出力が振動的になることを防止でき、制御性が向上する。
(もっと読む)
蒸気圧縮システムの超臨界圧力調整
蒸気圧縮システムは、圧縮器とガス冷却器と膨張装置と蒸発器とを含む。閉回路となるシステム内を冷媒が循環する。冷媒としては二酸化炭素が使用されることが好ましい。蒸気圧縮システムの性能係数を最適化するため、適応制御が採用される。システムが時間の経過とともに変化すると、システムを作動させるモデルが修正される。モデルは、可変係数を含む適応制御アルゴリズムによって決定される。モデルが変化すると、適応制御アルゴリズムの変数が変化する。それから、システムの高圧、そして性能係数を調整するために、ガス冷却器の制御装置が調節される。第一の実施例では、適応制御アルゴリズムの変数を修正して性能係数を最適化するのに、最小平均二乗法(LMS)が使用される。第二の実施例では、変化の遅い周期的加振法によって性能係数が最適化される。第三の実施例では、最適性能係数を見つけるために三角法が使用される。  (もっと読む)
(もっと読む)
81 - 91 / 91
[ Back to top ]