
Fターム[5H004KB13]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | 2自由度を有するもの (44) | 目標値からのフィードフォワードを有するもの (25)
Fターム[5H004KB13]に分類される特許
1 - 20 / 25
制御装置
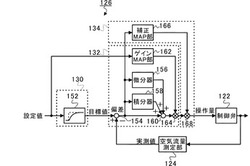
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて、制御対象の安定した制御を実行する。
【解決手段】制御装置126は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部130と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部132と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部134とを備える。
(もっと読む)
2自由度制御系のチューニング

【課題】フィードフォーワード制御器とフィードバック制御器から構成される2自由度制御系において主に制御対象の逆モデルから構成されるフィードフォーワード制御器内部のモデルと実際の制御対象との間にモデル誤差が生じた場合の目標値応答性を改善する。
【解決手段】フィードバック制御器4の操作量がゼロ付近となるようにフィードフォーワード制御器3内部のモデルを調整する機構と前記フィードフォーワード制御器内部のモデルとは無関係な外乱などを調整する機構を具備する。
(もっと読む)
ステップ追従時のオーバーシュート抑制用フィードフォワード項のオートチューニング方法及び装置
【課題】 オーバーシュート防止用のフィードフォワード項をオートチューニングできるようにする。
【解決手段】 上流側にFF制御ブロック5を備えたフィードバック制御系2の制御対象4の応答を入力可能なオートチューニング装置1を備える。FF制御ブロック5を無効にした状態で、ステップ目標値Xに対するステップ応答を求め、値が最大になるオーバーシュートの頂点と、与えられたステップ目標値の大きさから、オーバーシュート率αを求める。又、ステップ目標値が与えられた後にオーバーシュートの頂点に達するまでの時間から、ステップ応答の立ち上がり時間を求める。FF制御ブロック5に、入力されるステップ目標値Xの1−(α/(1+α))倍の値の一段目のステップ信号を出力した後、ステップ応答の立ち上がり時間ごとに、増加幅がα/(1+α)倍ずつ小さくなる多段階のステップ信号Sを出力させる指令を与える。
(もっと読む)
ステップ追従時のオーバーシュート抑制用フィードフォワード項のオートチューニング方法及び装置
【課題】 オーバーシュート防止用のフィードフォワード項をオートチューニングできるようにする。
【解決手段】 上流側にFF制御ブロック5を備えたフィードバック制御系2の制御対象4の応答を入力可能なオートチューニング装置1を備える。FF制御ブロック5を無効にした状態で、ステップ目標値Xに対するステップ応答を求め、値が最大になるオーバーシュートの頂点と、与えられたステップ目標値の大きさから、オーバーシュート率αを求める。又、ステップ目標値が与えられた後にオーバーシュートの頂点に達するまでの時間から、ステップ応答の立ち上がり時間T1を求める。FF制御ブロック5に、入力されるステップ目標値Xに係数(時定数の逆数)をlog(α/(1+α))/T1とした一時遅れをかけた信号Sを出力させる指令を与える。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
位置制御装置
【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
サーボの軌跡追従の位置決め調整方法及びその制御装置
【課題】 速度制御や位置制御調整後、円弧半径縮小量、最大速度と位置制御ゲインより最大速度フィードフォワードゲインを設定し、最大速度でオーバシュートしない範囲で速度フィードフォワードゲインを調整することができる、サーボ制御装置の軌跡追従の位置決め調整方法を、提供する。
【解決手段】 円弧半径縮小量と最大送り速度に基づいて位置追従遅れ量を算出する追従遅れ算出部と、前記位置追従遅れ量に基づいて最大フィードフォワードゲインを算出する最大フィードフォワードゲイン設定部と、前記追従遅れ量と最大フィードフォワードゲインに基づいて最大移動速度でフィードフォワードゲインを調整するフィードフォワードゲイン調整部と、を備えた。
(もっと読む)
加減速時のLPTCを使用したショートスパンシーク制御を行う磁気ディスク装置の制御装置および制御方法
【課題】ノミナルモデルが実プラントとモデル化誤差を含む場合に生じる、追従誤差を目標軌道に加え、目標軌道を再設計することにより目標軌道追従誤差を抑圧する学習型完全追従制御法(Learning based PTC:LPTC)を提案する。
【解決手段】マルチレートフィードフォワード制御を行う完全追従制御器と、シーク制御において、出力信号から目標軌道に対する追従誤差を学習し、新たな目標軌道を再設計するための目標軌道補償信号を生成する学習信号発生器とを備える学習型完全追従制御法により制御を行う磁気ディスク装置の制御装置及び制御方法を提供する。
(もっと読む)
システムを制御するためのコントローラおよびコントローラを有するシステムを制御する方法
【課題】ハイブリッドコントローラの状態をリセットする方法及びシステムを提供する。
【解決手段】コントローラは、フィードフォワード成分azrを生成するフィードフォワードモジュールと、比例成分Kpvzを生成する比例モジュールと、積分又は遅れ成分を生成する、状態リセットを有する積分又は遅れモジュールとを含む。ここで、aは高周波利得であり、Kpvは比例利得である。フィードフォワード成分azr、比例成分Kpvz、及び積分成分Kivzcは、制御されるシステムに対する入力uとして結合される。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
2自由度デジタル制御装置
【課題】 制御対象のモデルをパルス伝達関数で表し、離散系で制御器を設計してデジタル補償器を用いて実現することによって、簡単な構成で高速高精度に制御対象の出力を目標指令に追従させることができる2自由度デジタル制御装置を提供する。
【解決手段】 フィードフォワード補償部2とデジタルフィルタ1とフィードバック補償部3とパラメータ調整部5とを備え、フィードバック操作量ufbとフィードフォワード操作量uffとを加算して制御対象4の操作量uとする2自由度デジタル制御装置において、
フィードフォワード補償部2はフィードフォワードゲイン21とフィードフォワード位相補償部22とで構成され、パラメータ調整部5は制御対象4の操作量uと制御対象4の出力yに基づいてフィードフォワードゲイン21およびデジタルフィルタ1の係数を算出する。
(もっと読む)
ステージ装置、露光装置、及びステージ制御方法
【課題】ステージを駆動する際に生じる振動を効果的に抑制する。
【解決手段】所定タイミングで検出された制御対象301の位置と所定位置との誤差を、前記タイミングからの時間経過に応じてフィードフォワード制御部102による操作量を変更することによって補正するとともに、フィードバック制御部103への外部入力をフィードフォワード制御部102による補正量に応じて変更する制御部104を備える。
(もっと読む)
モータによる位置制御装置
【課題】
本発明は、フィードバック制御系の構造および応答に無関係に、位置および速度フィードフォワード制御系を周波数応答に基づいて、個別に調整可能となる位置制御装置を提供する。
【解決課題】
本発明は、モータの位置検出値を位置指令値に追従させることを目的としたモータによる位置制御装置において、速度規範指令値を出力する速度規範モデルと、速度制御器と、速度フィードフォワード出力信号を出力する速度フィードフォワード部と、位置規範指令値を出力する位置規範モデルと、位置制御器と、位置フィードフォワード出力信号を出力する位置フィードフォワード部と、から構成されることを特徴とする。
(もっと読む)
サーボ制御装置
【課題】実際の応答を見ながら複数の演算器のうち最適な構成を選択し、最短時間応答や最小オーバシュートを実現するサーボ制御装置を提供する。
【解決手段】指令にフィルタ処理をする指令フィルタ(103)と、フィルタ処理後の指令を変換し新たな指令を生成する指令変換器(101)と、フィルタ処理後の指令からフィードフォワードトルク指令を生成するフィードフォワード演算器(102)と、を備え、指令変換器は、制御対象のトルク指令から検出値までを近似した伝達関数モデルの特性の一部の特性を演算する演算器を複数備えており、複数の演算器の出力を選択するスイッチを備え、前記フィードフォワード演算器は、制御対象のトルク指令から検出値までを近似した伝達関数モデルの特性の一部の逆特性を演算する演算器を複数備えており、複数の演算器の出力を選択できるスイッチを備えた。
(もっと読む)
油圧駆動システムの制御方式
【課題】制御上の工夫によって、サーボ弁等の高価なアクチュエータを用いなくても、アクチュエータを精度よく動作させることができる制御方式を提供する。
【解決手段】空間的及び時間的に連続した連続値制御信号uを出力する主制御部11,12と、アクチュエータ2との間に、切換部14を介して選択的にフィードバック変調器20を接続する。フィードバック変調器20は、アクチュエータ2における、入力信号の受付け可能時間間隔、入力信号の取り得る離散値、及び、入出力特性に基づいた変換式によって、連続値制御信号uを空間的及び時間的に離散した離散値制御信号uQに変換する。切換部14は、連続値制御信号uの値が変調領域に入っているときにはアクチュエータ2へ離散値制御信号uPが出力され、それ以外のときは連続値制御信号uが出力されるように、接続を切り換える。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
駆動制御装置
【課題】広範囲な角速度指令に対して、安定で高精度な角速度追従特性と角度精度を実現可能にする。
【解決手段】応答可能範囲を拡大すべく駆動指令を生成していた過程に、立ち上がり、立下りを考慮したプロファイル型指令生成器4と、高精度な追従特性を得るべく2自由度型モデル追従補償器7とで構成された制御系を具備するとともに、該制御系の上位制御器として、要求される角速度で安定に駆動すべく要求プロファイルや補償器を適応的に切り替えたり、全体システムの安定性に関する評価指標をリアルタイムで算出しながら、コントローラを自動的に設定する最適制御器9を備えた構成を採用する。
(もっと読む)
温度制御装置
【課題】ランプ制御における目標値に対する追従性を向上させる。
【解決手段】α決定部22は、温度センサ13において検出された加熱室内の温度が、最終目標温度nxよりもオーバーシュート抑制温度nだけ低い切り替え温度nx−n以下のときには、加熱温度制御部23における2自由度PID制御のパラメータであるαの値を設定可能な範囲で最小値(例えば、0.1)に決定し、温度センサ13において検出された加熱室内の温度が、切り替え温度nx−nよりも高いときには、αの値を上記最小値よりも大きな値(例えば、0.65)に決定する。オーバーシュート抑制温度nは、最終目標温度nxに比例するとともに、最終目標時間tに反比例するように設定される。
(もっと読む)
1 - 20 / 25
[ Back to top ]