
Fターム[5H004KC53]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 偏差の変動に対するもの (21)
Fターム[5H004KC53]に分類される特許
1 - 20 / 21
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて、制御対象の安定した制御を実行する。
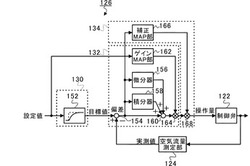
【解決手段】制御装置126は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部130と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部132と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部134とを備える。
(もっと読む)
障害を弱めるための方法
【課題】障害が識別されるだけではなく、有効信号に対する影響ができる限り小さくなるように障害を弱め且つ最少化し、障害を受けていない有効信号のダイナミクスができるだけ維持されるように拡張する、直接制御量の障害を弱めるための方法を提供する。
【解決手段】操作量が有効信号であるときに、閉制御回路内の直接制御量の障害を弱めるための方法において、直接制御量がそれぞれ相連続する二つの走査時点で連続的に測定され、直接制御量の値が差し引かれ、この差の大きさが予め定められている基準値だけずれている場合に、少なくとも一つの制御パラメータが、障害に対する操作量の反応が最少化されるように変化される。
(もっと読む)
適応制御装置

【課題】負荷変化や制御対象の特性変化に対しても即応でき、より優れた応答特性を実現し得る適応制御装置を提供する。
【解決手段】ループゲイン調節器7、適応制御器5およびPI制御器3を有し、制御偏差ea(t)を自乗する乗算器16と、乗算器16の出力を入力とする1次遅れ要素17と、を備えた適応制御器5の可変ゲイン演算部11において、制御偏差ea(t)の変動傾きが負のときの1次遅れ要素17の時定数を制御偏差ea(t)の変動傾きが一定または正のときの1次遅れ要素17の時定数よりも大きい値に設定する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の著しい変化に起因して発生させる相殺振動を大きく変化させる必要がある場合に対応して制振制御の応答性を向上させた制振装置を提供する。
【解決手段】振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、制振すべき位置において振動Vi3と相殺振動Vi4との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、振動Vi3と疑似振動Vi3’に基づき制振すべき位置に発生される相殺振動Vi4との偏差に対応する偏差情報を取得し、取得した偏差情報に基づいて偏差の増加に応じて適応フィルタ32fが収束する速度が速まるように収束係数32uを変更する。
(もっと読む)
制御ロジック及びフィードバック制御方式
【課題】幅広い振動数帯域において振動低減効果を有する制御ロジック及びフィードバック制御方式を提供する。
【解決手段】畳み込み積分を含みフィルタ係数を更新する制御ロジックにおいて、入力信号として、エラー信号のみを用い、フィルタ係数の更新式を次式
【数1】
のようにして制御を行うことで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。前記制御ロジックによりフィードバックゲインをサンプリング時間ごとに修正することで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
制御システムおよび制御支援装置
【課題】より適切なサーボの制御条件の設定を短時間で実現する制御システムおよび制御支援装置を得ること。
【解決手段】負荷装置113を駆動するモータ112を制御するサーボシステム100と、前記サーボシステム100に接続され、前記モータ112を所定の目標動作に制御するために設定される調整パラメータの最適値を自動調整する制御支援装置200と、で構成され、前記制御支援装置200における調整パラメータ調整部210はシミュレーション結果に基づいて、調整すべきパラメータやその調整範囲を自動設定し、調整範囲内で調整パラメータの最適値をモータ112の実動作の結果に基づいて自動調整する。
(もっと読む)
PIDパラメータ調節支援装置
【課題】熟練を要することなく、PIDパラメータを適正に調節できるようにする。
【解決手段】複数伝達関数パラメータ同定手段14は、制御対象13に入力される操作量MVの時系列データと、操作量MVに応じて制御対象13から出力される制御量PVの時系列データに基づいて、予め構造が設定された制御対象13を表現する複数の伝達関数のパラメータを同定し、適合率計算手段15は、その伝達関数による制御量PVの推定値と、制御対象13から出力された制御量PVの実測値との適合率を計算し、最良適合率伝達関数選択手段16は、適合率計算手段15にて計算された適合率の最も良い伝達関数を制御対象13のモデルとして選択し、最適PIDパラメータ探索手段17は、最良適合率伝達関数選択手段16にて選択された伝達関数を対象として、予め決められた評価指標が満たされるようにPIDパラメータを探索する。
(もっと読む)
呼吸加熱器の閉ループ制御のためのPID係数調整
【課題】流量の測定を必要とせず呼吸システム内の温度測定に依拠する信頼性のあるPIDフィードバック制御を提供すること。
【解決手段】呼吸システム(10)のために設けられる加熱器システム(16)は、PIDフィードバック制御(100)を有し、PIDフィードバック制御(100)では、ウォームアッププロセスなどの際に係数が調整され、係数は、流量または湿度レベルを直接監視することを必要とせずに、温度目標値に関する熱入力と熱出力の間の差に基づいて、加熱された水(27)のチャンバ(20)を通る気体の推定流量に対応するように調整される。目標値に関する測定された温度の挙動に基づく係数の定常状態調整もまた開示される。
(もっと読む)
フィードバックループの制御方法
【課題】従来のフィードバックループの制御方法は、フィードバックループのループゲインを固定値としているので、動特性と静特性とを両立することができず、動特性及び静特性のいずれか一方を犠牲にする必要がある。
【解決手段】本発明によるフィードバックループの制御方法は、制御偏差εである角度差Nθ−φに対応した処理信号KE1sin(Nθ−φ)の大きさを監視し、この処理信号KE1sin(Nθ−φ)の大きさに応じて第1及び第2ループ内増幅器107,108のいずれか一方のみを接続状態とすることで、回転位置信号変換回路100のループゲインを第1ゲイン107aと第2ゲイン108aとで切り替える。
(もっと読む)
駆動制御装置
【課題】広範囲な角速度指令に対して、安定で高精度な角速度追従特性と角度精度を実現可能にする。
【解決手段】応答可能範囲を拡大すべく駆動指令を生成していた過程に、立ち上がり、立下りを考慮したプロファイル型指令生成器4と、高精度な追従特性を得るべく2自由度型モデル追従補償器7とで構成された制御系を具備するとともに、該制御系の上位制御器として、要求される角速度で安定に駆動すべく要求プロファイルや補償器を適応的に切り替えたり、全体システムの安定性に関する評価指標をリアルタイムで算出しながら、コントローラを自動的に設定する最適制御器9を備えた構成を採用する。
(もっと読む)
制御装置
【課題】制御量以外の参照パラメータの検出結果の信頼性の低下などに起因して、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、高い制御精度を確保できる制御装置を提供する。
【解決手段】制御装置1の空燃比コントローラ100は、連結重み関数Wcpiを空燃比誤差推定値Eafなどに乗算して、修正誤差Weafiを算出し、この値Weafiが値0になるように、値Dlift_bsiを算出し、連結重み関数Wcpiを値Dlift_bsiなどに乗算して、値Dlift_lsiを算出し、この値Dlift_lsiの総和である値Dliftを値Liftinに加算することにより、値Liftin_modを算出し、この値Liftin_modに応じて、空燃比をフィードフォワード制御するための第1推定吸気量Gcyl_vtを算出し、空燃比をフィードバック制御するための空燃比補正係数KAFを算出し、これらに応じて燃料噴射量TOUTを算出する。
(もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成する装置である。シミュレーションモデル作成手段は、対象の物理的な性質を考慮したシミュレーションモデルを作成する。第1の修正関数生成手段は、シミュレーションモデルに入力データを入力して得られる中間データを対応する実測データに近づける第1の修正関数を生成する。第1の補正手段は、中間データを第1の修正関数で補正する。第2の修正関数生成手段は、シミュレーションモデルに第1の補正手段により補正された中間データを入力して得られる出力データを対応する実測データに近づける第2の修正関数を生成する。第2の補正手段は、出力データを第2の修正関数で補正する。このようにすることで、出力データを実測データに精度良く近似させることができる。
(もっと読む)
一般化予測制御(GPC)を基礎とする軸の位置制御方法
軸(2)のための位置調節器(1)に、瞬時位置実際値(x(0))、瞬時位置目標値(x*(0))および予測位置目標値(x*(ti))と、各予測位置目標値(x*(ti))についてそれぞれ直前の位置目標値(x*(0),x*(ti))に対するそれの時間的ずれ(δti)を表わす値とが入力されている。位置調節器(1)が、軸(2)のモデル(6)に基づいて、瞬時操作量(S(0))と、予測位置目標値(x*(ti))についてその都度期待操作量(S(ti))および期待位置実際値(x(ti))とを算出する。位置調節器(1)が、瞬時操作量(S(0))、期待操作量(S(ti))および期待位置実際値(x(ti))を、瞬時位置実際値(x(0))および期待位置実際値(x(ti))と対応する位置目標値(x*(0),x*(ti))との総偏差(G)が予め定められた評価関数にしたがって最適化されるように算出する。位置調節器(1)が軸(2)を瞬時操作量(S(0))に応じて制御する。  (もっと読む)
(もっと読む)
ロボット制御装置
【課題】 急激な動作を防止することにより、安全性を向上させる。
【解決手段】 制御装置11は、比例ゲインを変更する際、CPU32により、比例ゲインを変更したことにより生じる出力の変化を相殺するように、誤差積分を算出し更新する。制御装置11は出力更新周期が経過すると、誤差、比例ゲインの最新値、積分時間の最新値および誤差積分の最新値を併用して、位置および速度のいずれかの出力値を算出する演算回路40と、出力値を出力する出力端子38とを含む。
(もっと読む)
同期制御装置
【課題】 2軸間の位置及び速度の同期誤差を最小にするように制御する同期制御において、1軸目、2軸目どちらに外乱が与えられた場合でも、また、2軸間で摩擦の大きさが大きく異なるような場合でも、2軸を同期させることができるとともに、定常状態においても過渡状態においても、また、速度フィードバックだけでなく位置フィードバックも同期させることができるようにする。
【解決手段】 各軸について位置フィードバックによる位置制御手段を備えた同期制御装置において、位置指令に基づいて各軸のフィードフォワード信号を作成するフィードフォワード制御部と、2軸間の位置フィードバックの差から同期誤差を求める同期誤差演算部と、求められた同期誤差から位置補正信号を求める位置補正信号演算部と、各軸のフィードフォワード信号と位置補正信号から各軸のフィードフォワード補正信号を求めるフィードフォワード補正信号演算部と、フィードフォワード補正信号を速度指令に加える加算部と、を備える。
(もっと読む)
プラントの制御装置
【課題】非線形補償器を用いた制御において、非線形補償器の非線形補償を実際の非線形特性に適合させるようにしたプラントの制御装置を提供する。
【解決手段】線形要素と非線形要素とを含んだエンジンの可変位相機構42について、線形要素に基づいた応答指定型制御アルゴリズムに従ってプラントの出力Cainを位相目標値Cain_cmdに収束させる仮入力Uslを算出する線形コントローラ110と、仮入力とプラントの非線形要素の特性を相殺するように設定された非線形補償器112に基づいて制御入力Ucainを算出するプラントの制御装置において、線形要素のみから構成される制御対象モデル114aによって算出されたプラントの出力推定値Cain_estと、プラントの出力検出値Cainの誤差e_nlとに基づいて非線形補償器112を修正する非線形特性適応器(修正手段)114とを備える。
(もっと読む)
モデル予測制御装置およびモデル予測制御方法
【課題】 制御対象の状況に応じて処理負荷の低減が可能なモデル予測制御を提供する。
【解決手段】 複数の操作から特定の操作を選択する特定操作選択部4を設け、制御目標量と現在の制御量との偏差が所定値以内であれば、特定操作選択部4によって選択された特定の操作についてのみ、最適操作量候補を設定し、最適操作量を決定するための予測演算を最適操作決定部3で行う。特定の操作以外の操作については、前回の操作量を保持して、処理負荷の低減を図る。
(もっと読む)
PID制御装置
【課題】 PID制御装置にさらに素早くスムーズな応答性をもたせる。
【解決手段】 PID制御装置7は、制御対象の応答出力値と目標値との偏差に基づいて制御出力を演算するPID制御装置であり、偏差に比例した比例値を出力する比例演算手段20と、偏差の時間積分に比例した積分値を出力する積分演算手段30と、偏差の時間微分に比例した微分値を出力する微分演算手段40と、微分値が予め定められた第1規制範囲内にない場合に積分値を無効とする積分演算規制手段50と、偏差の符号の変化を監視し、符号の変化に応じて微分値が予め定められた第2規制範囲を超えないようさらに演算する微分演算規制手段60とを備えている。
(もっと読む)
1 - 20 / 21
[ Back to top ]