
Fターム[5H004MA11]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | フィルタ (186)
Fターム[5H004MA11]の下位に属するFターム
Fターム[5H004MA11]に分類される特許
41 - 52 / 52
モータ駆動制御装置

【課題】常に安定した電流が流れ、モータ軸の回転ムラの発生を防止することができるモータ駆動制御装置を得る。
【解決手段】DCブラシレスモータ6のモータ軸端に取り付けられた検出器7によって得られる速度フィードバック105の応答周波数を任意に可変するFIRフィルタ31から出力される速度フィードバック106と速度指令100との偏差に速度ゲインを乗じたフィードバック電圧指令102を出力するフィードバック制御部3と、摩擦負荷、加減速トルク、誘起電圧、アンバランス負荷を補償するためのフィードフォワード電圧指令101を出力するフィードフォワード制御部4とを備え、フィードバック制御部3から出力されるフィードバック電圧指令102に、フィードフォワード制御部4から出力されるフィードフォワード電圧指令101を重畳して、DCブラシレスモータ6にモータ電圧指令103を出力する。
(もっと読む)
モデル同定装置およびモデル同定プログラム

【課題】 モデルを同定するためのデータと同一のデータを用いて次数を決定することが可能となるとともに、複数のモデルの相対評価を必要とすることなく、モデルに対するモード解析を行うことで客観的に最適な次数を決定する。
【解決手段】モデル同定装置2には、モード解析手段11、半共振周波数抽出手段12および次数決定手段13が設けられ、モード解析手段11は、任意に設定された次数に対する差分方程式のモード解析を行い、半共振周波数抽出手段12は、モード解析手段11によるモード解析結果に基づいて、特性不明システム1の最も低い反共振周波数を抽出し、次数決定手段13は、反共振周波数抽出手段12にて抽出された反共振周波数とサンプリング周波数との比に基づいて、入力信号u[n]と応答信号y[n]との関係を表す差分方程式を最小二乗法にて導出するための次数を決定する。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 少ない計算量で、外乱抑圧特性を向上させるだけでなく、完全に位置指令θrとアーム位置θaを一致させることができるサーボ制御装置を提供する。
【解決手段】 制御対象の制御量xdが指令refに一致するようにフィードバック制御器と、フィードフォワード制御器と、オブザーバとを備えたサーボ制御装置において、フィードバック制御器は、オブザーバによる状態量推定値shにゲインGを乗じたものを第2の操作量tfb2にフィードバックする構成であり、フィードフォワード制御器は、操作量trefから前記制御量xdまでの伝達関数P1の逆関数P1−1および、制御対象の状態量を検出する検出器の出力xfbから制御量xdまでの伝達関数P2の逆関数P2−1を含むようにした。
(もっと読む)
同期制御装置
【課題】 2軸間の位置及び速度の同期誤差を最小にするように制御する同期制御において、1軸目、2軸目どちらに外乱が与えられた場合でも、また、2軸間で摩擦の大きさが大きく異なるような場合でも、2軸を同期させることができるとともに、定常状態においても過渡状態においても、また、速度フィードバックだけでなく位置フィードバックも同期させることができるようにする。
【解決手段】 各軸について位置フィードバックによる位置制御手段を備えた同期制御装置において、位置指令に基づいて各軸のフィードフォワード信号を作成するフィードフォワード制御部と、2軸間の位置フィードバックの差から同期誤差を求める同期誤差演算部と、求められた同期誤差から位置補正信号を求める位置補正信号演算部と、各軸のフィードフォワード信号と位置補正信号から各軸のフィードフォワード補正信号を求めるフィードフォワード補正信号演算部と、フィードフォワード補正信号を速度指令に加える加算部と、を備える。
(もっと読む)
駆動制御装置
【課題】装置の重量を増加させることなく移動台の振動を防止する直動装置の駆動制御装置を提供する。
【解決手段】駆動制御装置が、移動台を移動させるモータのモータ駆動部と、モータ駆動部に入力する入力信号から所定の周波数成分を除去するフィルタ部とを備え、フィルタ部が除去する周波数成分の設定周波数を、移動台に負荷される負荷重量に応じた機械系の固有振動数に合わせて設定する。
(もっと読む)
電空制御ループのためのリード・ラグ入力フィルタ装置
小振幅変化制御又は設定値信号を受け取ったときに付属品によって経験させられる低ダイナミクスを克服するために、リード・ラグ入力フィルタ(20)が1以上のボリュームブースタやQEV等の弁付属品を有するポジショナフィードバックループ(40)の前部に接続されている。ユーザインターフェイス(107)がリード・ラグ入力フィルタ(20)に接続され、オペレータや他の制御要員が、任意の多数の所望の応答特性を制御ループに与えるために、リード・ラグ入力フィルタ(20)の動作特性を閲覧しかつ変更することを可能にしている。  (もっと読む)
(もっと読む)
高圧ポンプコントローラ
高圧ポンプのためのフィードバック制御ループが、溶剤移送中のアキュムレータ速度および圧力を修正する。アキュムレータ速度は、予想される圧力に等しいシステム圧力を維持するように調節され、それによって、熱効果によって生じる流れの不足の効果が除去される。  (もっと読む)
(もっと読む)
適応制御装置、その使用、この型式の制御装置を有するセンサ、及びセンサの外乱信号を自動補償する適応方法
本発明は、制御ループと、前記制御ループに配置された比較装置と、前記制御ループの入力値は、前記比較装置に供給され、前記比較装置の下流に接続された評価手段と、その評価手段は、前記比較装置の出力値を結論値に変換し、前記結論値及び前記入力値が供給され、前記比較装置に供給される補正値を発生する補正手段とを備える、センサの外乱信号を自動補償する制御装置に関する。本発明は、さらに、入力値が補正値と比較される、センサの外乱信号を自動補償する方法に関する。本発明は、同様に、本発明による制御装置を備えるセンサ、及びセンサの外乱信号を自動補償するそのような制御装置の使用に関する。 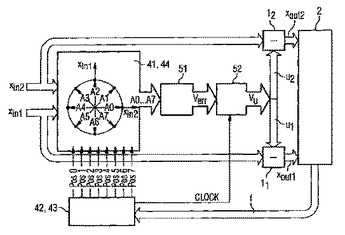 (もっと読む)
(もっと読む)
水力発電用ガバナとそれを備えた水力発電用調速制御装置、水力発電プラント
【課題】 高速負荷追従を実現しつつ、事故に起因して1機1負荷となったときにも安定した制御運転を実現可能な水力発電用ガバナとそれを備えた水力発電用調速制御装置、水力発電プラントを提供する。
【解決手段】 水力発電用調速制御装置は、大別して、偏差信号生成部10、PID演算部20、アクチュエータ30、等から構成されている。偏差信号生成部10は、周波数偏差と出力偏差とを、予め設定された速度垂下率で加算して制御偏差信号を生成する。PID演算部20は、比例演算を行う周波数重み付きのP要素21、積分演算を行うI要素22、不完全微分の微分演算を行うD要素23、これらの要素21〜23からの各出力を加算する出力加算器24、を備えている。周波数重み付きのP要素21には、本発明に従い、このP要素21により得られる値の遅れ演算を行う遅れフィルタ(P要素用遅れフィルタ)が含まれている。
(もっと読む)
制御装置
【課題】比較的高い周波数で変動する指令入力に制御対象の出力を遅れることなく追従させる制御装置を提供する。
【解決手段】指令入力の変動分の基本波成分の周期の1/N倍の時間毎に1からNまでの整数を鋸波状にインクリメントして出力する位相選択器と、N個のフィルタ群と、前記フィルタ群の中から前記位相選択器の出力で選択された1つのフィルタの入力にフィードフォワード演算器の出力を接続し前記フィルタの出力を選択して出力するフィルタ選択器とを具備し、前記フィルタ選択器の出力を安定化補償装置の出力に加算する。
(もっと読む)
変調アルゴリズムを用いたプラントの制御装置
【課題】非線形特性の強いプラントに対して十分に非線形特性を補償し、また、制御量の変動が大きいプラントに対しても、追従性、安定性を満たす制御手法を提供する。
【解決手段】本発明は、変調アルゴリズムを用いたプラントの制御装置を提供する。この制御装置は、プラントの出力を目標値に制御するための仮制御入力を算出する手段と、仮制御入力を複数の成分に分割する手段と、複数の成分のうち少なくとも1つを変調する手段と、変調された成分と、他の成分を加算して制御入力を生成する手段と、を有する。これによって、従来の変調アルゴリズムによるプラントのフリクションやヒステリシスなどの非線形特性の補償能力を維持しつつ、変調による入力変動を最小化できる。このため、仮制御入力が大きく変化するようなプラントにおいても、出力が振動的になることを防止でき、制御性が向上する。
(もっと読む)
信号をフィルタリングするための装置及び方法
信号をフィルタリングするための方法及び装置が提供される。この方法及び装置は、フィルタリングされる信号のサンプルを受け取り、そのサンプルと関連するバイアスを特定する。この方法及び装置は、また、外乱の影響を低減するために、バイアスの一部分と組み合わせて、フィルタリングされる信号の以前のサンプルに対しての期待値を出力する。  (もっと読む)
(もっと読む)
41 - 52 / 52
[ Back to top ]