
Fターム[5H004MA12]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | フィルタ (186) | ローパスフィルタ (71)
Fターム[5H004MA12]に分類される特許
1 - 20 / 71
規範応答演算装置およびそれを用いた車両用制駆動力制御装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
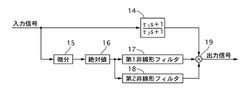
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
制御装置、照射装置及び駆動装置

【課題】複数のモータの制御において、同期の高精度化及び制御の高速化の両立に有利な技術を提供する。
【解決手段】複数のモータのそれぞれについてフィードフォワード制御器を備え、前記複数のモータをそれぞれ制御する制御装置であって、前記フィードフォワード制御器の少なくとも1つは、当該フィードフォワード制御器が制御対象とするモータとは異なる少なくとも1つのモータの入出力特性を表す関数を含む、ことを特徴とする制御装置を提供する。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
高効率サーボアクチュエータ及び励磁ドライバを実現するためのシステム、方法、及び装置
【課題】高効率サーボアクチュエータ及び励磁ドライバを実現するためのシステム、方法、及び装置を提供すること。
【解決手段】本発明の例示的な一実施形態によれば、アクチュエータ(216)を制御するための方法が提供される。この方法は、基準信号(204)を生成するステップと、基準信号(204)に少なくとも部分的に基づいてスイッチト駆動信号(207)によりアクチュエータ(216)を操作するステップと、スイッチト励磁信号(228)を生成するステップと、スイッチト励磁信号(228)に関連付けられたフィードバック(236)に少なくとも部分的に基づいて基準信号(204)を制御するステップとを含むことができる。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
外乱抑制荷重制御装置
【課題】リニアモータ併用シリンダから出力される実測荷重値を目標荷重値に良好に追従させて外乱に対する応答性を高めるとともに、リニアモータの発熱を抑えることができる外乱抑制荷重制御装置を提供すること。
【解決手段】リニアモータ併用シリンダ荷重制御部は、リニアモータ併用シリンダの目標荷重値信号と実測荷重値信号の差分信号からエアシリンダ装置の目標荷重値信号に対する追従特性が優れた低周波数帯域を取り出して、この低周波差分信号に基づいてエアシリンダ装置にエアシリンダ装置用最適荷重付加指示信号を送るエアシリンダ装置荷重制御部;及び上記差分信号からリニアモータの目標荷重値信号に対する追従特性が優れた高周波数帯域を取り出して、この高周波差分信号に基づいてリニアモータにリニアモータ用最適荷重付加指示信号を送るリニアモータ荷重制御部;を有する。
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
プロセス制御システムにおける適応推定モデル
【課題】 プロセスパラメータの測定値を用いて予測モデルの出力を適応的に調節すること。
【解決手段】 適応推定モデルは、プロセスパラメータを推定する出力を生成し、プロセスの動作中の調節された推定プロセスパラメータを生成すべく、前記推定モデルの出力を一又は複数の測定プロセスパラメータと結合するように構成されたニューラルネットワーク又は自然モデルのような標準的な推定モデルを備える。前記適応推定モデルは、前記推定モデル自体をリフォームすることなく、処理能力及び時間の重要でない増大のみを要して、プロセス変数の推定における非線形及び線形誤差を低減又は補正する。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する方法および装置
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する例示の方法および装置が開示される。開示された例示の装置は、第1の接続部および電源に連結された第2の接続部を有する位置トランスミッタと、位置トランスミッタの第1の接続部に連結された少なくとも第1の接続部を含む電空コントローラと、電空コントローラの第1の接続部と第2の接続部とを連結するレジスタとを含む。 (もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
位置決め制御装置の振動抑制制御装置
【課題】フィルタ位相遅れの影響を受けずに振動の抑制を可能とする。
【解決手段】外乱オブザーバ10を用いた加速度制御系を含む位置決め制御装置の振動抑制制御装置において、位置指令の部分に低域通過フィルタ12を挿入し、位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記位置指令部分の低域通過フィルタ12のカットオフ周波数とする。ここで、前記位置指令の部分に加えて、速度フィードフォワード指令の部分にも低域通過フィルタ14を挿入し、前記位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記速度フィードフォワード指令部分の低域通過フィルタのカットオフ周波数とすることができる。
(もっと読む)
外乱振動抑制制御器
【課題】パラメータ設定に多くの工数を要することなく、外乱により発生する振動を抑制する効果を最大化できる外乱振動抑制制御器を得る。
【解決手段】ローパスフィルタを内在し、目標電圧Vref及び検出電流信号Iactに基づいて推定外乱電圧Vestを演算する外乱電圧推定オブザーバ61と、推定外乱電圧Vestの低周波成分をカットした信号Vest_HPを演算するハイパスフィルタ62と、Vest_HPにゲインKWを乗じて目標外乱抑制電圧Vref_wを演算する外乱電圧制御器(外乱制御器)63とを設け、前記ローパスフィルタのカットオフ周波数とハイパスフィルタ62のカットオフ周波数の積の平方根が外乱周波数と一致するように、前記ローパスフィルタ及びハイパスフィルタ62のカットオフ周波数を設定する。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック操作量UFBを算出し、フィードバック操作量UFBを平均化することにより平均化フィードバック操作量UFBAVを算出する。プラントの作動状態に応じて保持操作量UHOLDを算出し、保持操作量UHOLDと平均化フィードバック操作量UFBAVとを設定比率KRに応じて合成し、修正保持操作量UHLDCを算出する。出力操作量UFMを一定値に保持できるときは、出力操作量UFMを修正保持操作量UHLDCに設定するとともに、フィードバック操作量UFBを修正保持操作量UHLDCに設定する。
(もっと読む)
移動体の駆動制御方法、露光方法、ロボット制御方法、駆動制御装置、露光装置、及び、ロボット装置
【課題】制御対象モデルに基づくフィードフォワード制御と外乱オブザーバとを利用して高精度な位置制御を行う。
【解決手段】駆動制御装置は、制御対象(301)の伝達特性の逆システムの一部を示す第1伝達関数(1021a)に第1の完全追従制御法を適用させることで第1のフィードフォワード信号(S1a)を求める第1フィードフォワード制御部(102a)と、制御対象(301)の伝達特性の逆システムの一部を示すとともに第1伝達関数(1021a)とは異なる第2伝達関数(1021b)に第2の完全追従制御法を適用させて第2のフィードフォワード信号(S1b)を求める第2フィードフォワード制御部(102b)と、第1のフィードフォワード信号(S1a)に対する第1の補償信号(d')を求める外乱オブザーバ(104)と、を備え、第2のフィードフォワード信号(S1b)と第1の補償信号(d')とから求めた第2の補償信号(S5)を用いて制御対象(301)を駆動する。
(もっと読む)
2自由度デジタル制御装置
【課題】 制御対象のモデルをパルス伝達関数で表し、離散系で制御器を設計してデジタル補償器を用いて実現することによって、簡単な構成で高速高精度に制御対象の出力を目標指令に追従させることができる2自由度デジタル制御装置を提供する。
【解決手段】 フィードフォワード補償部2とデジタルフィルタ1とフィードバック補償部3とパラメータ調整部5とを備え、フィードバック操作量ufbとフィードフォワード操作量uffとを加算して制御対象4の操作量uとする2自由度デジタル制御装置において、
フィードフォワード補償部2はフィードフォワードゲイン21とフィードフォワード位相補償部22とで構成され、パラメータ調整部5は制御対象4の操作量uと制御対象4の出力yに基づいてフィードフォワードゲイン21およびデジタルフィルタ1の係数を算出する。
(もっと読む)
制御装置および制御方法
【課題】制御量を設定値に近づける特性を完全に犠牲にしてしまうことは避けつつ、過渡状態、整定状態に関係なくエネルギー消費量を抑制する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2との操作量差δMVを算出する操作量差算出部31−1,31−2と、操作量差δMVに基づいて設定値SP1,SP2に対するSP補正量ΔSP1,ΔSP2を算出するSP補正量算出部32−1,32−2とを備える。SP補正量算出部32−1,32−2は、操作量MV1のエネルギー効率が悪い場合にエネルギー効率が良い方向へ変化するようにSP補正量ΔSP1,ΔSP2を算出する。
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 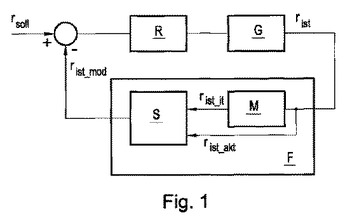 (もっと読む)
(もっと読む)
フィードフォワード信号を用いたディジタルサーボ制御装置
【課題】 モータ動作中の位置偏差を小さく、または、モータ位置決め時のオーバーシュート量を小さくすることができた、更に、モータ動作中の速度またはトルクフィードフォワード信号が量子化誤差の影響によるばたつきを低減して、モータが一定速度で動作している時の騒音を小さくすることができるフィードフォワード信号を用いたディジタルサーボ制御装置を提供する。
【解決手段】 フィードフォワード制御系が、位置指令に基づいて速度フィードフォワード信号vff0を生成する速度フィードフォワード作成部6と、前記位置指令に基づいてトルクフィードフォワード信号tffを生成するトルクフィードフォワード作成部8と、前記速度フィードフォワード信号vffおよび前記トルクフィードフォワード信号tffに基づいて速度フィードフォワード変更信号vffを生成する速度フィードフォワード変更部7と、を備える。
(もっと読む)
1 - 20 / 71
[ Back to top ]