
Fターム[5H004MA36]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | 計算機、プロセッサ (96)
Fターム[5H004MA36]の下位に属するFターム
パソコン (7)
複数の計算機を有するもの (7)
Fターム[5H004MA36]に分類される特許
1 - 20 / 82
駆動システム及び駆動方法、並びに露光装置及び露光方法
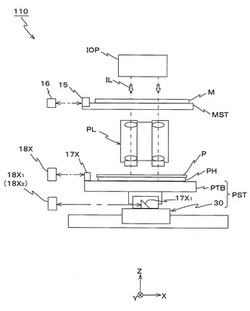
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
設計装置及び設計プログラム

【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
ロボット制御システム、ロボットシステム及びセンサー情報処理装置
【課題】 ハードウェアー化や安定性の検証や解の応答性の切り替えを容易にするロボット制御システム、ロボットシステム及びセンサー情報処理装置等を提供すること。
【解決手段】 ロボット制御システムは、力覚センサー10からのセンサー情報に基づいて、ロボット100の目標軌道の補正値を出力する力制御部20と、目標軌道に対して補正値に基づく補正処理を行なって目標値を求め、求めた目標値を出力する目標値出力部60と、目標値に基づいてロボット100のフィードバック制御を行うロボット制御部80とを含み、力制御部20はデジタルフィルター部22を有し、力制御部20はセンサー情報に対してデジタルフィルター部22によるデジタルフィルター処理を行うことで、力制御における常微分方程式の解を求めて、求めた解に基づいて補正値を出力する。
(もっと読む)
PID制御装置
【課題】2系統のPID制御の切替えを可能にしたPID制御装置において、制御対象からの制御量にノイズが含まれていても、切替えを行う際に目標値の変更だけで制御対象でショックが発生しないようにする。
【解決手段】第1PID演算部11で変位の制御量Pv1と目標値Sv1との偏差e1によりPID演算し、演算結果を制御切替え部13に出力する。第2PID演算部12で荷重の制御量Pv2と目標値Sv2との偏差e2によりPID演算し、演算結果を制御切替え部13に出力する。PID演算アルゴリズムの過程で、微分項Dnと比例項Pnを除いた積分項TnのみでMvtの値を演算し、Mvtをメモリに逐次記憶する。切替え時に、Mvtを操作量として制御対象2に出力する。
(もっと読む)
シミュレータ構築装置およびシミュレータ構築方法
【課題】部品モジュールの接続が限定されない系統モデルを構築可能な装置及び方法を提供する。
【解決手段】シミュレータ構築装置20は、入力手段22から受け付けた情報に従い部品モジュールを配置し結線する処理部38と、配置し結線した部品モジュールの種類、個数および並び順を判断する処理部39と、部品モジュールの種類と当該種類に対応するソースコードとを関連付けた部品基本ソースプログラム32と部品モジュールのプロトコル設定の情報を含むソース生成ルール情報33を参照し、各部品モジュールのソースコードをそれぞれ生成する処理部40と、何れかの部品モジュールを制御する旨の情報と、部品モジュールと同じプロトコルで各部品モジュールと通信する旨の情報とを有する組み上げルール情報34を参照し、部品モジュールを制御するメインモジュールのソースコードを組み上げる処理部41とを備える。
(もっと読む)
適応制御装置および適応制御方法ならびに射出成形機の制御装置および制御方法
【課題】 応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置および適応制御方法ならびに射出成形機の制御装置を提供する。
【解決手段】 制御対象2から出力される制御値yに並列フィードフォワード補償器4から出力される補償値yfを加えた帰還値yaと指令値rに基づいて操作値uを出力するようにしてフィードバック制御を行う適応制御装置であって、並列フィードフォワード補償器4は、制御対象2の周波数応答特性を逐次推定する同定機構6と、当該周波数応答特性に基づいて補償値yfを調整する調整機構7とを備えている。
(もっと読む)
制御系の評価装置およびその方法
【課題】 周波数特性に不確かさを有する制御対象を含む制御系の安定性を正確に評価する。
【解決手段】 特性データ取得部11は、制御器の周波数特性を取得する。変動データ取得部12は、制御対象のゲイン特性および位相差特性を取得する。伝達特性演算部13は、複素座標系において、ゲイン特性の変動範囲と位相差特性の変動範囲が重なる領域を制御対象の周波数特性の変動範囲として、周波数特性の変動範囲と制御器の周波数特性から制御系の一巡伝達特性とその変動範囲を演算する。評価部13は、一巡伝達特性とその変動範囲から制御系の安定性を評価する。
(もっと読む)
物理量制御装置
【課題】動作条件の設定が容易で設定ミスを起こしにくい物理量制御技術を提供する。
【解決手段】物理量制御装置は、被制御物の被制御値と予め与えられた設定値とを一致させるように、被制御物の被制御値を変化させる手段へ供給する駆動信号を出力するコントローラと、第1の目標値に対して単位時間毎に一定の変化量を減算して得られる値、又は第1の目標値より相対的に小さい第2の目標値に対して変化量を加算して得られる値を設定値としてコントローラに出力する設定値出力部と、設定値出力部により出力される設定値が第1の目標値又は第2の目標値に至ったときに設定値出力部による変化量の減算又は加算を停止させる停止判定部と、変化量を入力するための操作部を備える。
(もっと読む)
モデリング装置および該方法
【課題】本発明は、先験的知識を利用することによって不充分な入出力データであっても、より精度の高いモデルを構築し得るモデリング装置および該方法を提供する。
【解決手段】本発明のモデリング装置Sは、システムのモデルをそのパラメータの値を決定することで構築する装置であって、前記モデルが、連続した時間と見なされる時間変数を含む数式であり、予め得られているシステムに関する先験的情報を制約条件として設定する制約条件入力設定部21および制約条件記憶部41と、所定の入力データを実績入力データとしてシステムに入力した場合に出力された実績出力データと、前記実績入力データをモデルに入力した場合に出力されたモデル出力データとの誤差を評価する評価関数の評価結果を求める評価演算部13と、前記制約条件を満たし、かつ、前記評価結果が最良となるように、前記モデルのパラメータの値を求めるモデル更新決定部14とを備える。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
制御器の構成方法、システム及びプログラム
【課題】スケジューリング・パラメータ・ベクトルの各候補について、制御器を自動的に構成するための技法を提供する。
【解決手段】プラントのLPVモデルを記述し、スケジューリング・パラメータ数を与え、複数の要素からなるスケジューリング・パラメータ・ベクトルの各要素には、制約条件の上位要求から出てくる最大値と最小値が与えられ、その各候補について、Min、Max、それらの中間値の各々の間について、νギャップを計算し、νギャップ間の差が大きいものから順番にスケジューリング・パラメータ候補とし、最初に与えられたパラメータ数を選び、LMIに変換し、選定したスケジューリング・パラメータの最大値と最小値に関する全ての組み合わせ端点についてH∞基準によって制御器を求め、パラメータ選定時に計算したνギャップによって重み付けした双一次補間によって一般化プラントへの制御器を構成する。
(もっと読む)
障害を弱めるための方法
【課題】障害が識別されるだけではなく、有効信号に対する影響ができる限り小さくなるように障害を弱め且つ最少化し、障害を受けていない有効信号のダイナミクスができるだけ維持されるように拡張する、直接制御量の障害を弱めるための方法を提供する。
【解決手段】操作量が有効信号であるときに、閉制御回路内の直接制御量の障害を弱めるための方法において、直接制御量がそれぞれ相連続する二つの走査時点で連続的に測定され、直接制御量の値が差し引かれ、この差の大きさが予め定められている基準値だけずれている場合に、少なくとも一つの制御パラメータが、障害に対する操作量の反応が最少化されるように変化される。
(もっと読む)
制御装置
【課題】離散時間系の制御対象モデルを用いて、所定の拘束条件が複数のモデルパラメータ間に存在する制御対象や、1次遅れなどの遅れ特性を有する制御対象を制御する場合において、制御精度および制御の安定性を向上させることができる制御装置を提供する。
【解決手段】制御装置1は、ECU2を備える。ECU2は、2つのモデルパラメータα,1-αを含む制御対象モデルを整理し、モデルパラメータαが乗算されていない項および乗算されている項を制御対象モデルの左辺および右辺にそれぞれ振り分けるとともに、左辺を合成信号値W_actとし、右辺を推定合成信号値W_hatとしたときに、合成信号値と推定合成信号値との間の同定誤差eid'が最小となるように、モデルパラメータαの同定値αidをオンボードで算出し、この同定値αidと制御対象モデルから導出された制御アルゴリズム(式(34),(35))とを用いて、空燃比補正係数KAFを算出する。
(もっと読む)
データ処理装置、データ処理方法、及び、プログラム
【課題】未知の環境を効率的に学習する。
【解決手段】状態価値算出部32は、エージェントの行動によって、状態が遷移する、行動ごとの状態遷移モデルの各状態について、現在状態等の所定の状態に近い状態への遷移確率が大きい状態ほど、値が大きくなる、現在状態を基準とする状態価値を算出し、行動価値算出部33は、状態遷移モデルの各状態、及び、エージェントが可能な各行動について、現在状態を基準とする状態価値が大きい状態への遷移確率が大きいほど、値が大きくなる行動価値を算出する。目標状態設定部34は、行動価値のばらつきが大きい状態を、エージェントが行う行動によって到達する目標となる目標状態に設定し、行動選択部35は、目標状態に向かう行動を選択する。本発明は、例えば、自律的に行動するエージェントが未知の環境を学習する場合に適用できる。
(もっと読む)
PID制御器の構成方法、プログラム及びシステム
【課題】プラントの事前情報が乏しく不安定系であっても、入力と出力が観測できれば準最適なロバストPID制御器を構成可能にする。
【解決手段】PID制御器の係数空間の中から、入出力データによって反証された組合せを除外して絞込みを行い、その係数候補群における各候補の評価関数履歴と全体での進化履歴の情報を共有させながら候補群を移動させ、同時に候補群近傍の係数空間探索を自動的に行いつつ、プラントと制御器の全体系におけるロバスト安定を実現する係数を非反証的に自動設計する機能を与える。各候補の評価関数履歴のうち最小となったPIDゲインと、候補群全体履歴のうち最小評価値になったPIDゲインの情報を記憶・共有しつつ、PSOにより、より良い中心を目指して候補群全体を移動させ、候補周辺探索と、その中からの反証候補除去を実行することで自動設計し、PSOによる候補群の各粒子の周辺探索候補に対しても非反証制御を行う。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム
【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、将来的に予測されるプラントの運転状態の変化をも考慮に入れた、プラントの環境負荷物質低減及び運転効率改善を実現する制御ロジックを自律学習する機能を具備させることで、プラントの運転条件変更に対してロバストな制御を提供する。
【解決手段】本発明のプラントの制御装置は、運転情報データベースと運転特性計算部の組み合わせ又は機器情報データベースと機器特性計算部の組み合わせのいずれか一つを含み、前記運転特性計算部、又は機器特性計算部が計算した特性値を用いてプラントの運用コストを評価するコスト評価部と、前記コスト評価部が出力するコスト評価値が最適となるようにプラントに与える制御信号の生成方法を自律学習する操作方法学習部とを備え、前記操作方法学習部は、前記コスト評価部が出力するコスト評価値を手掛かりに操作方法を学習するように構成する。
(もっと読む)
圧力レギュレータ及び除振装置
【課題】下流側に流量変動が発生した場合においても、高応答かつ高精度に圧力制御を行うことができる圧力レギュレータを提供する。
【解決手段】圧力レギュレータ41は、サーボ弁11によって、気体供給源10から供給される気体の等温化圧力容器13への流入流量を規制し、等温化圧力容器13内の圧力を一定に保持する。ここで、サーボ弁11を操作する圧力制御手段(コンピュータ46)は、圧力計14で計測した等温化圧力容器13内の圧力をフィードバック制御する圧力制御系をメインループとし、その内側に、流入流量を制御する流入流量制御系を構成すると共に、圧力微分計15で計測した等温化圧力容器13内の圧力微分値に基づいて等温化圧力容器13における流入流量と流出流量との差である流入出流量差を推定するオブザーバを構成し、推定した流入出流量差を流入流量制御系にフィードバックするモデル追従制御系を構成する。
(もっと読む)
1 - 20 / 82
[ Back to top ]