
Fターム[5H004MA40]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | 設計支援装置 (15)
Fターム[5H004MA40]に分類される特許
1 - 15 / 15
プラントモデル生成装置およびプラント運転支援システム
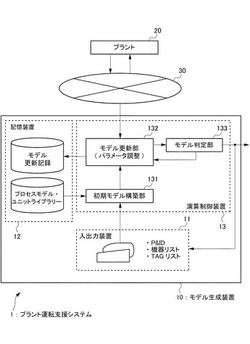
【課題】初期プラントモデル構築時の作業負担を軽減する。
【解決手段】演算制御装置13は、プラント稼働前、入力されるプラント機器の機器接続情報にしたがいプラントモデル・ユニットライブラリの中から必要なプラントモデルユニットを抽出し、続いて入力されるプラント機器の機器情報を抽出されたプラントモデルユニットのモデルパラメータに反映させて初期プラントモデルを構築し、プラントの稼働を契機に取得される運転データを初期プラントモデルに入力してモデル出力値を計算して乖離度を判定してモデルパラメータを調整し、モデル出力値が予め設定された乖離度の許容範囲に入るまでモデルパラメータの調整およびシミュレーションを繰り返し実行してプラントモデルを得る。
(もっと読む)
電動機器のシステム設計支援装置

【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
モデリング装置および該方法
【課題】本発明は、先験的知識を利用することによって不充分な入出力データであっても、より精度の高いモデルを構築し得るモデリング装置および該方法を提供する。
【解決手段】本発明のモデリング装置Sは、システムのモデルをそのパラメータの値を決定することで構築する装置であって、前記モデルが、連続した時間と見なされる時間変数を含む数式であり、予め得られているシステムに関する先験的情報を制約条件として設定する制約条件入力設定部21および制約条件記憶部41と、所定の入力データを実績入力データとしてシステムに入力した場合に出力された実績出力データと、前記実績入力データをモデルに入力した場合に出力されたモデル出力データとの誤差を評価する評価関数の評価結果を求める評価演算部13と、前記制約条件を満たし、かつ、前記評価結果が最良となるように、前記モデルのパラメータの値を求めるモデル更新決定部14とを備える。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
制御パラメータ調整装置、制御パラメータ調整方法、及びプログラム
【課題】アクチュエータを制御するための制御パラメータを容易に調整可能な制御パラメータ調整装置、制御パラメータ調整方法、及びプログラムを提供する。
【解決手段】調整装置300は、電動アクチュエータ100の識別情報と、制御パラメータを調整するための調整ルールを表す調整ルール情報とを対応付けて記憶する電動アクチュエータ情報DB310と、制御パラメータを調整する制御部330とを備える。制御部330は、入力部320に入力された電動アクチュエータ100の識別情報に対応する調整ルール情報を電動アクチュエータ情報DB310から取得し、電動アクチュエータ100の等価慣性モーメントと取得した調整ルール情報が表す調整ルールとに基づいて、制御パラメータを算出し、制御装置200に記憶されている制御パラメータを更新する。
(もっと読む)
プロセス分析モデルと実際のプロセス動作とのオンライン整合
【課題】バッチモデルについて、オンラインバッチ処理の現在の動作状態に関する確かな決定を可能にするバッチモデルおよび分析システムを提供する。
【解決手段】単純で計算上安価な技法を使用して、進行中、現在実行中またはオンラインのバッチ処理から収集されたデータをバッチプロセス用に形成されたバッチモデルと整合させる。このデータ整合技法により、潜在構造射影(PLS)および主成分分析(PCA)技法といった他の統計処理技法がオンラインバッチデータに適用され、現在実行中のバッチの品質に関する分析が実行できるようになる。これらの分析が、ユーザがバッチモデルに基づいて現時点におけるバッチの品質、およびバッチランの終了時に所望のバッチ出力品質基準に達する可能性を決定できるようにする有用な情報を、バッチオペレータ等のユーザに提供する。
(もっと読む)
プログラム、記録媒体、サーボモータの制御パラメータ調整方法、開発支援装置、サーボシステムの開発システム
【課題】サーボモータを制御するサーボドライバのパラメータを容易に調整可能な技術を提供する。
【解決手段】ユーザは、自身の利用する装置を開発支援装置の画面上で選択する。選択された装置(機械構成)と剛性値とが関連付けられる。さらに剛性値とサーボドライバの制御パラメータとが対応付けられる。完了条件を満たすように、制御パラメータが自動的に調整される。したがって、ユーザが自身の利用する装置を選択するだけで、サーボドライバのパラメータを自動的に調整することができる。
(もっと読む)
シミュレーション方法、システム、及びプログラム
【課題】シミュレーションの不安定性を回避する。
【解決手段】シミュレーション・システムは、動作シナリオに沿って、1つの状態から別の状態に遷移する際に、今から移行する状態が未踏である場合に、未踏であることを示すソフトウェア的なガード1202を置き、未踏のガードに遭遇することに応答して、今から移行する状態が安定かどうかのテストを行う。このテストの結果、今から移行する状態が安定であると判定すると、シミュレーション・システムは、未踏のガードを外す。そうして、その先の状態の遷移箇所に別の未踏のガードを配置する。一方、今から移行する状態が不安定であると判定すると、シミュレーション・システムは、未踏のガードを不安定のガード1204に取り替える。そして、遷移の出現状態を記録して、好適にはシミュレーションを終了する。
(もっと読む)
入力変数選択支援装置
【課題】簡便な方法により入力候補変数から入力変数を絞り込むための指標を提示し、入力変数選択の支援を行う入力変数選択支援装置を提供する。
【解決手段】平均値が0であり標準偏差が1となるように標準化されたモデル情報データを用いて、全入力候補変数と出力変数の関係を表す複数の入出力モデル[j](j=1,・・・,JであってJは2以上の自然数)を、モデル原理を異ならせて多形式にわたり生成し、各入出力モデル[j]の各入力候補変数に対する出力変数の絶対値である感度を生成する感度生成を各入出力モデル[j]についてそれぞれ行い、各入出力モデルの感度に基づいて入力変数を選択提示する。
(もっと読む)
パラメータ調整方法及び装置
【課題】実プラントの特性を精度よく模擬するダイナミックシミュレータを作成することが出来るパラメータ調整装置を提供する。
【解決手段】プラントの複数の制御量と、プラントの運転から与えられる複数の操作量とから、前記操作量の投与の結果として得られる制御量を数学的モデルで演算するダイナミックシミュレータ11と、実プラント20で与えた操作量に関連して実測された制御量の実測値と、ダイナミックシミュレータ11に実操作量を入力して求めた演算値との偏差が小さくなるように、ダイナミックシミュレータ内のパラメータを調整するパラメータ演算装置14とを備える。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
モデリング装置
【課題】
本発明は、温度制御系の伝達関数モデルを作成するモデリング装置に関し、入力時系列データと出力時系列データを取り違えずに温度制御系の正しいモデリングを行なう。
【解決手段】
入力時系列データと出力時系列データを、分子および分母の次数がフレキシブルな伝達関数にフィッティングすることにより伝達関数モデルを作成し、作成された伝達関数モデルの分子と分母の各次数を比較し、分子の次数の方が分母の次数よりも高い場合に、入力時系列データと出力時系列データを取り違えている可能性がある旨をユーザに通知する。
(もっと読む)
プラントの制御装置
【課題】本発明の目的は、修正したモデルを用いた学習を高速化して制御アルゴリズムを修正しプラントを精度良く制御するプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントの運転特性を解析する数値解析実行部と、の数値解析結果の情報を基にプラントの制御特性を模擬するモデルと、前記モデルを用いてプラントの操作方法を学習する学習部と、前記学習部の学習情報データを保存する学習情報データベースと、前記学習部の学習情報データを基に状態入力をモデル入力次数より少ない入力数で表現するパターンデータを生成するパターン生成部と、前記パターン生成部で生成したパターンデータを保存するパターンデータベースと、複数のパターンを用いて学習した学習結果の中から制御効果の良い学習結果を選択する学習結果判定部を備え、選択した学習結果に基いて操作信号生成部でプラントに対する操作信号を算出するように構成。
(もっと読む)
サーボゲイン算出方法、サーボゲイン算出プログラム及びサーボゲイン算出装置
【課題】 高度な専門知識を有していなくとも比較的容易にサーボゲインを算出することができるサーボゲイン算出方法、サーボゲイン算出プログラム及びサーボゲイン算出装置を提供する。
【解決手段】 フィードバック制御系の伝達関数に対応する理想的な特性を持つ伝達関数を用いてフィードバック制御系のサーボゲインを算出するに当たり、フィードバック制御系の伝達関数と理想的な特性を持つ伝達関数とを等置させ、ラプラス演算子の係数に関する連立方程式を得て、この連立方程式から、正の実数解が得られる係数の条件式を算出する一方、フィードバック制御系の各種定数を決定し、決定された各種係数を正の実数解が得られる係数の条件式に代入してフィードバック制御系のサーボゲインを算出する。
(もっと読む)
伝達関数設定装置
【課題】 等しい極と零とを持たない伝達関数を一意に設定できるようにすること。
【解決手段】 行列Cの線形独立な列数が当該行列Cの列数と等しくなり、且つ、シルベスタ行列Dの線形独立な列数が当該シルベスタ行列Dの列数と等しくなるように、伝達関数G(z)の係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定するようにした。そのため、行列解析を行うことで、伝達関数G(z)に等しい極と零とを持たせない係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定することができる。それゆえ、例えば、行列Cの解析等で係数や次数を設定して伝達関数G(z)を設定した後に、その設定した伝達関数G(z)の極と零とを複素平面にプロットし、等しいと判断できる極と零とを恣意的に取り除かせる方法とは異なり、等しい極と零とを持たない伝達関数G(z)を一意に設定することができる。
(もっと読む)
1 - 15 / 15
[ Back to top ]