
Fターム[5H105GG06]の内容
電気的推進車両の集電装置 (4,133) | 集電装置及び給電装置の監視 (293) | 監視手段及び方法 (184) | 検出変量及び手段 (180) | 光学的変量及び手段 (53) | テレビカメラを用いるもの (30)
Fターム[5H105GG06]に分類される特許
1 - 20 / 30
電気駆動ダンプトラック
【課題】トロリー線の結合区間があっても、トロリー走行中のドライバの操作負担を軽減し安定したトロリー走行を行うことができる電気駆動ダンプトラックを提供する。
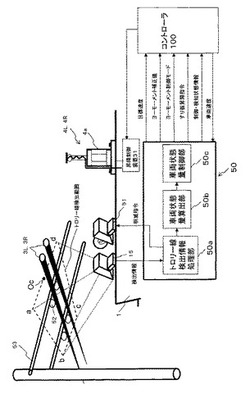
【解決手段】車両制御装置50と、コントローラ100と、インバータ制御装置30と、操舵制御装置32とで構成される制御装置200は、車両本体1が、トロリー線結合区間Cに至る前の第1走行区間では第1トロリー線3L1,3R1に、トロリー線結合区間を過ぎた後の第2走行区間では第2トロリー線3L2,3R2に追従して走行するよう車両本体1にヨーモーメントを与える制御を行い、トロリー線結合区間では代表点から第2目標点に向かって所定の経路が設定され、この所定の経路に沿って、いずれは第2トロリー線3L2,3R2に追従して走行するよう車両本体1にヨーモーメントを与える制御を行う。
(もっと読む)
電気駆動ダンプトラック

【課題】すり板の偏摩耗を防ぐとともにトロリー走行中のドライバの操作負担を軽減することのできる電気駆動ダンプトラックを提供する。
【解決手段】車両制御装置50と、コントローラ100と、インバータ制御装置30と、操舵制御装置32は、カメラ15により取得した画像情報に基づいて、車両本体1がトロリー線3L,3Rを中心として蛇行して走行するよう車両本体1にヨーモーメントを与える制御を行う制御装置を構成する。また、この制御装置は、カメラ15により取得した画像を座標情報に変換し、その座標情報に基づいて車両本体1の少なくとも1つの代表点とトロリー線3L,3R上に位置する少なくとも1つの目標点を算出し、かつこの目標点を基準にして変動する変動点を設定し、代表点が変動点に近づくように車両本体1にヨーモーメントを与える制御を行う。
(もっと読む)
車両制御装置
【課題】トロリー走行中のドライバの操作負担を軽減することのできる電気駆動ダンプトラックを提供する。
【解決手段】車両制御装置50と、コントローラ100と、インバーダ制御装置30と、操舵制御装置32は、カメラ15により取得した画像情報に基づいて、車両本体1がトロリー線3L,3Rに追従して走行するよう車両本体1にヨーモーメントを与える制御を行う制御装置を構成する。また、この制御装置は、カメラ15により取得した画像を座標情報に変換し、その座標情報に基づいて車両本体1の少なくとも1つの代表点とトロリー線3L,3R上に位置する少なくとも1つの目標点を算出し、代表点が目標点に近づくように車両本体1にヨーモーメントを与える制御を行う。
(もっと読む)
電気駆動ダンプトラック
【課題】トロリー走行中のドライバの操作負担を軽減することのできる電気駆動ダンプトラックを提供する。
【解決手段】
車両制御装置50と、コントローラ100と、インバータ制御装置30と、操舵制御装置32は、トロリー線検出装置(カメラ)15により検出した情報に基づいて、集電装置4L,4Rのすり板4La,4Raの昇降を制御する制御装置を構成する。また、この制御装置は、トロリー線検出装置により検出した情報に基づいて、すり板とトロリー線3L,3Rとの位置関係を演算し、すり板がトロリー線に接触する所定の範囲を外れたときは、すり板を上げる操作を禁止するか、すり板が上がっている場合はすり板を下げるよう制御する。
(もっと読む)
集電装置付運搬車両
【課題】架線からの集電にあたり集電装置の破損を抑制する集電装置付運搬車両を提供する。
【解決手段】集電装置付運搬車両であるダンプトラック1は、荷物を積載するベッセル5と、延伸して架線8から電力を受け、縮退して架線8から離隔配置するパンタグラフ7と、パンタグラフ7からの電力と、自走駆動源と、の少なくとも1つにより駆動輪32を回転駆動し、ベッセル5を載置する車両本体3と、パンタグラフ7と架線8との相対位置を検出するパンタグラフ位置検出器91と、パンタグラフ7と架線8とが接続される位置となるように車両本体3の走行方向を制御し、又は、車両本体3の操作すべき方向が認識できる情報を指示する制御装置と、を含む。
(もっと読む)
給電装置搭載車両
【課題】車両本体の給電部が外部の電力供給先に対して位置ずれしている状態であっても、給電部から外部の電力供給先への非接触給電を行うことができる給電装置搭載車両の提供にある。
【解決手段】外部の電力供給先へ電力供給する受給電装置20を車両本体11に搭載した給電装置搭載車両であって、受給電装置20は、非接触給電により外部の電力供給先へ電力供給する給電部を有する非接触ユニット21と、非接触ユニット21の向きを変更可能に、車両本体11に取り付ける非接触ユニット可動機構と、を備え、非接触ユニット可動機構を駆動させるユニット駆動部と、を備え、ユニット駆動部は、非接触ユニット21の向きを前記電力供給先の向きに対向させた。
(もっと読む)
非接触充電システム
【課題】車両への非接触式充電を行う際に、人体、動物等の電磁界からの影響を低減することができる非接触充電システムを提供する。
【解決手段】非接触充電システムは、車両3に設けられる車両側の受電コイル21と車両外部の地上側充電装置10に設けられる地上側の送電コイル11との間でワイヤレスで送電を行い、車両3の二次電池23に地上側充電装置10からの電力を充電する。非接触充電システムは、非接触充電を実施するときに、または実施前の待機段階で、送電コイル11を覆う地上側パッド1及びその周辺から、人体、動物を含む排除すべき排除対象物を排除する排除手段を備える。当該排除手段は、地上側パッド1の外表面を上方に膨らむドーム形状に形成することにより構成される。
(もっと読む)
車両の駐車支援装置およびそれを備える電動車両
【課題】車両の外部を撮影する撮影装置による送電ユニットの認識精度を向上させて給電設備に対する車両の駐車精度を向上させる。
【解決手段】車両100の制御装置は、給電設備200と車両100との間の距離がL1よりも大きいとき、カメラ120によって撮影される画像に基づいて給電設備200の駐車枠を認識し、上記の距離がL1以下になると、送電ユニット220の側面の画像に基づいて送電ユニット220を認識し、さらに上記の距離がL2(<L1)以下になると、送電ユニット220の上面の画像に基づいて送電ユニット220を認識する。そして、制御装置は、これらの認識結果に基づいて駐車支援制御を実行する。
(もっと読む)
共鳴型非接触受電装置の位置決め支援装置および共鳴型非接触受電装置の位置決め方法
【課題】ワイヤレスでの受電状態の良好さの程度を精度良く検出し、位置決めすることが可能な共鳴型非接触受電装置の位置決め支援装置を提供する。
【解決手段】制御装置180は、自己共振コイル112の位置の検出開始後の初期段階に、位相検波器116で測定した測定値をメモリ181に記録し、メモリ181に記録した測定値に対して現在位相検波器116で測定した測定値の符号が反転するまで初期段階よりも自己共振コイルの位置を目標方向に移動させるための制御を実行し、位相検波器116で測定した測定値の符号が反転してから受電電圧センサ190で測定した受電電圧VRに基づいて自己共振コイル112の位置合わせを行なうための制御を実行する。
(もっと読む)
車両用非接触受電装置
【課題】ワイヤレスでの受電状態の良好さの程度を精度良く検出することが可能な車両用非接触受電装置を提供する。
【解決手段】車両用非接触受電装置は、一方端と他方端を有する導電材が巻回されて形成される自己共振コイル112と、自己共振コイル112を収容する収容部600と、収容部600の内壁に設けられ、自己共振コイル112の共鳴状態を検出するための電極115とを備える。電極115は、内壁のうち、自己共振コイル112の導電材に沿ういずれかの位置であって、導電材の一方端、他方端、および一方端と他方端の中点を避けた位置に配置される。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体に設置されているすり板の欠けや抉れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理部が、予め設定される基準画像上のパンタグラフの舟体の画像と前記入力画像上のパンタグラフ舟体の画像とを比較する検査小領域画像比較部5h、及び、比較結果に基づいてパンタグラフ舟体の欠けや抉れの有無を判断する比較判断部5iを有するパンタグラフ状態検査処理手段を備える構成とした。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体又はこの舟体に設置されているすり板の折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理部とを備えたパンタグラフ監視装置において、画像処理部が、検査パンタグラフ画像中に撮影されているパンタグラフに対して直線を抽出する処理を行う直線抽出部5gと、抽出した直線の状態に基づいてパンタグラフの舟体もしくはすり板又はその両方の折れの有無を判断する折れ判断部5hとを備えるパンタグラフ舟体形状検査部5Cを有する構成とした。
(もっと読む)
給電システム
【課題】集電子を絶縁トロリ線に精度よく接触させる操作が容易な給電システムを提供すること。
【解決手段】給電線に対して位置決めされて走行レーンの近傍に配置されたターゲット装置61と、給電線に接触させて充電池に電力を供給するために、自走クレーン装置10の走行方向に直交する幅方向に移動自在に自走クレーン装置10に設けられた集電子と、集電子に対して位置決めされて自走クレーン装置10に設けられ、ターゲット装置61の映像を撮像するターゲット検出装置63と、自走クレーン装置10に対する集電子の位置を調整する移動機構と、給電線に対する集電子の幅方向の位置ずれ量を撮像部によって撮像されたターゲット装置61の映像に基づいて算出する算出部75と、を備え、移動機構は、算出部75において算出された位置ずれ量だけ集電子を自走クレーン装置10に対して移動させることを特徴とする。
(もっと読む)
駐車支援システムおよび駐車支援システムの制御方法
【課題】給電設備への駐車の精度を確保する支援を行なうとともに、障害物との接触などの可能性が低減された駐車支援システムおよびその制御方法を提供する。
【解決手段】駐車支援システムは、車両の後方を撮影するためのカメラ120と、カメラ120で撮影された第1画像を表示するための表示部121と、表示部121の表示制御を行なう制御装置180とを備える。制御装置180は、車両と目標駐車位置との距離が所定値よりも小さくなった場合に、第1画像では得られない位置合わせについての情報を含む第2画像を作成し、表示部121に表示開始させる。
(もっと読む)
パンタグラフ変位測定装置及びトロリ線硬点検出方法
【課題】パタンマッチング処理の精度を向上させることを可能とするパンタグラフ変位測定装置及びトロリ線硬点検出方法を提供する。
【解決手段】ラインセンサカメラ2によってマーカを撮影した画像を処理することによりパンタグラフの加速度を求める画像処理部5Aが、入力画像を作成する入力画像作成部5aと、テンプレートを設定するテンプレート設定部5bと、入力画像を分割する画像分割処理部5cと、テンプレートの拡縮を行うテンプレート拡大・縮小処理部5dと、入力画像上のマーカのピクセル位置を検出するパタンマッチング処理部5eと、マーカのピクセル位置をパンタグラフの実際の変位に変換するパンタグラフ変位計算部5fと、パンタグラフの変位に対して平滑化処理を行うフィルタリング処理部5gと、パンタグラフの加速度を出力する加速度出力部5hとを有する構成とした。
(もっと読む)
トロリ線摩耗量検出光学系およびトロリ線摩耗量測定装置
【課題】
装置高さが低くかつ小型化が可能なトロリ線摩耗量検出光学系およびトロリ線摩耗量測定装置を提供することにある。
【解決手段】
この発明は、レール横断方向に配列された単色光光源複数個によりスリット状の投光光を生成してトロリ線の摺動面に照射する投光ユニットと、第1の受光器、単色光の波長範囲を除去するフィルタを介してトロリ線からの反射光を受ける第2の受光器とを設け、2つの受光器の受光信号の差により摺動面についての検出信号を得るものである。
(もっと読む)
受電案内装置、受電案内方法、及び受電案内プログラム
【課題】車両と給電装置との正確な位置関係を車両周辺の画像を用いて案内することができる、受電案内装置を提供すること。
【解決手段】受電案内装置90は、車両の周辺を撮影するカメラ40と、車両の周辺の画像データを記録する画像メモリ94gと、画像データから車両を含む領域の合成画像を生成する合成画像生成部94aと、合成画像と受電部10の位置を示す受電位置画像とを表示するディスプレイ93と、受電部10の受電効率に基づき給電装置と受電部10との位置関係を特定するための位置関係情報を取得する位置関係情報取得部94cと、受電部10の給電装置からの受電効率を特定する受電効率特定部94bと、受電効率と位置関係情報とに基づき給電装置と受電部10との位置関係を特定する位置関係特定部94dと、当該特定した位置関係と合成画像における給電装置の位置とに基づき、受電位置画像の表示位置を決定する表示位置決定部94eとを備える。
(もっと読む)
画像処理によるパンタグラフ撮影装置
【課題】監視カメラの視野内を通過する列車を撮影した画像の保管を効率よく行うとともに、録画画像からパンタグラフを自動検索することを可能とした画像処理によるパンタグラフ撮影装置を提供する。
【解決手段】車輌接近警報部10と、監視カメラ30と、画像処理装置40とを備え、画像処理装置40が、入力画像から車輌1を検出する進入車輌検出部43と、入力画像を記録する録画部44と、列車接近信号に基づいて監視カメラ30の起動及び停止を制御するとともに、車輌1の有無に基づいて録画部44による画像の記録の開始及び停止を制御する制御部42を備える撮影機能部40Aと、録画部44において記録された画像からパンタグラフの有無を検索するパンタグラフ検索部47と、パンタグラフが検出された場合にパンタグラフの画像を表示する画像出力部49を備えるパンタグラフ検索機能部とから構成するようにした。
(もっと読む)
画像処理によるパンタグラフ撮影装置
【課題】監視カメラの視野内を通過する列車を撮影した画像の保管を効率よく行うとともに、録画画像からパンタグラフを自動検索することを可能とした画像処理によるパンタグラフ撮影装置を提供する。
【解決手段】車輌接近警報部10a,10bと、監視カメラ30と、パンタグラフ検出センサ40と、画像処理装置50とを備え、画像処理装置50が、パンタグラフ検出センサ40の検出結果に基づいて入力画像の録画の有無を制御する制御部51及び入力画像が一時的に保管される録画部52を備える撮影機能部50Aと、録画部52から入力画像を取得・保管する記憶部55、入力画像を画像処理してパンタグラフの有無を検索するパンタグラフ検出部56、及び入力画像にパンタグラフが映っていない場合に記憶部55に入力画像の削除信号を送信する検査制御部54を備えるパンタグラフ検出機能部50Bとから構成される。
(もっと読む)
パンタグラフ高さ測定装置及びそのキャリブレーション方法
【課題】パンタグラフの高さ測定におけるキャリブレーションを簡易に行うことを可能としたパンタグラフ高さ測定装置及びそのキャリブレーション方法を提供する。
【解決手段】車両10の屋根上に設置されるラインセンサ20によって撮影した画像を処理用コンピュータ30で解析して走行中の車両10のパンタグラフ10aの高さを測定するパンタグラフ高さ測定装置において、パンタグラフ10aの端面にマーカ40を設け、ラインセンサ20が複数段階で高さを変更されるパンタグラフ10aのそれぞれの高さ毎にマーカ40を撮影し、処理用コンピュータ30が、ラインセンサ20によって撮影した画像から得られるマーカ40の画像上の位置とマーカ40の実際の高さとの関係式を求めるように構成した。
(もっと読む)
1 - 20 / 30
[ Back to top ]