
Fターム[5H115PU09]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | 電動機 (9,664) | 交流電動機 (5,920) | 誘導電動機 (204)
Fターム[5H115PU09]に分類される特許
1 - 20 / 204
車両の駆動装置
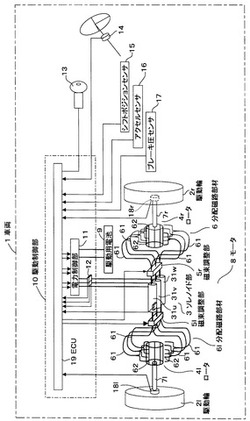
【課題】とくに径方向に嵩張らない画期的な構造のモータを使用し、モータが径方向に嵩張らないようにして最低地上高を確保しつつ、左右の駆動輪の駆動に必要なトルクを発生する。
【解決手段】左右の駆動輪2l、2rを駆動するモータ8が、ソレノイド部3から左右それぞれに延びた左右の分配磁路部材6l、6rと、左右の分配磁路部材の分枝した複数の端部が外周に配置されて回転界磁を形成し、駆動輪2l、2rそれぞれを駆動するロータ4l、4rと、左右の分配磁路部材6l、6rそれぞれの相間を磁気的に調整する左右の磁束調整手段5l、5rとを備え、ロータ4l、4rの内周や外周にステータを配置しないようにして径方向に嵩張らない画期的な構造に形成し、最低地上高を確保しつつ、左右の駆動輪2l、2rの駆動に必要なトルクを発生する。
(もっと読む)
電気車制御装置

【課題】粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる電気機関車の電気車制御装置を提供すること。
【解決手段】速度ゼロから切換速度に達するまでは速度センサ付ベクトル制御器CAによって加速制御を行い、これと併行して速度ゼロから速度センサレスベクトル制御器CBも動作させて主電動機1の電圧・電流から推定速度を演算する。この推定速度と速度センサ2から得た速度とから空転検知用速度演算器5により空転検知に用いる速度を演算し、この速度を各動輪速度とみなし、その最小値を基準速度に設定して各動輪速度の差速度によって空転検知器6により空転検知を行いながら加速制御を行う。この加速制御中の平均加速度と機関車の平均牽引力から牽引質量推定器9で牽引質量を推定し、閾値演算器8において空転検知の閾値を設定する。列車速度が切換速度以上になった後は、この閾値を用いて軸加速度による空転検知を行う。
(もっと読む)
電気自動車
【課題】快適な操作性能を確保するとともに、走行安定性に優れた電気自動車を提供する。
【解決手段】電気自動車1は、前輪側の左右輪に制駆動力を伝達する前輪用モータ3fと、後輪側の左右輪に制駆動力を伝達する後輪用モータ3rと、前輪用モータ3fを駆動する前輪用インバータ8fと、後輪用モータ3rを駆動する後輪用インバータ8rとを備え、前輪用モータ3f及び後輪用モータ3rは、車体の中心25aに対して線対称又は点対称に配置され、前輪用インバータ8f及び後輪用インバータ8rは、前輪用モータ3f及び後輪用モータ3rが線対称に配置されているときは線対称に配置され、前輪用モータ3f及び後輪用モータ3rが点対称に配置されているときは点対称に配置された。
(もっと読む)
車両制御装置
【課題】ゴムタイヤ等の低剛性体からなる車輪を駆動する誘導電動機が複数個接続された車両制御装置において、並列に複数個接続された各誘導電動機に流れる電流アンバランスによる特定電動機の過電流状態を抑制する。
【解決手段】各誘導電動機に流れる電流を用いて、電流アンバランスよる特定電動機の過電流を抑制する如くトルク制御の補正を行う。車輪を駆動する誘導電動機が複数個接続された車両制御装置において、複数個接続された各誘導電動機に流れる電流を検出する検出装置を備え、制御回路に接続し、検出した電流に応じてトルク指令を補正し、特定の誘導電動機の過電流を防ぐことを特徴とする。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の抑制と内燃機関の運転効率の低下の抑制との両立を図る。
【解決手段】効率優先運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御すると第2モータから出力されるトルクが異音トルク範囲内となるときには(S170)、異音抑制動作ラインと要求パワーPe*とを用いて得られる第1仮運転ポイントと(S180)、第2モータから出力されるトルクが異音トルク範囲の上限よりも大きくなると共に要求パワーPe*がエンジンから出力されるよう設定される第2仮運転ポイントと(S190)、のうち回転数が小さい方の運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S200〜S270)。
(もっと読む)
ハイブリッド自動車
【課題】駆動軸の回転数に急変が生じるものとしても、二次電池が過大な電力により充放電するのを抑制する。
【解決手段】低μ路の路面上を走行するなどアクセルペダルの踏み込みにより駆動輪にスリップが生じその後アクセルペダルの踏み込みを維持しながらブレーキペダルの踏み込みによりスリップしている駆動輪をグリップさせた両踏みグリップ状態を判定し、両踏みグリップ状態でないときには要求パワーPeをエンジンから効率良く出力するための目標運転ポイントでエンジンを運転すると共に要求トルクを駆動軸に出力するために設定されたモータMG1のトルク指令Tm1*を実行トルクT1*に設定してモータMG1を駆動制御し、両踏みグリップ状態であるときには実行トルクT1*に値0を設定することによりモータMG1のトルクを制限する。
(もっと読む)
ハイブリッド自動車
【課題】電動機の駆動回路などの電圧を適正に保持して装置の保護を図ると共に動力性能を発揮させる。
【解決手段】モータMG1によりエンジンをクランキングする際には、モータMG2の回転数Nm2が昇圧回路にLC共振を生じさせる閾値Nref以下のときには、昇圧上限値Vlimに低電圧Vloを設定し(S590)、モータMG2の回転数Nm2が閾値Nrefよりも大きいときには、昇圧上限値Vlimに高電圧Vhiを設定し(S600)、インバータ必要電圧Vinv*と昇圧上限値Vlimとのうち小さい方を昇圧回路の電圧指令VH*に設定する(S610)。これにより、エンジン22のクランキング中に昇圧回路のLC共振によって高電圧系のコンデンサに大きな電圧変動が生じるものとしても、耐圧を超える過大な電圧が作用するのを抑制することができると共に電圧の過剰な制限を抑制して走行性能を発揮させることができる。
(もっと読む)
内燃機関装置およびハイブリッド自動車
【課題】内燃機関をより精度良く目標回転位置に停止させる。
【解決手段】エンジンの自動停止指示がなされたとき、自動停止指示がなされてからの経過時間が所定の自立運転継続時間を経過するまではエンジン自立運転制御を実行し、その後、燃料カットモータリング制御を実行し(ステップS400〜S480)、燃料カットモータリング制御が実行されてからの経過時間tmが所定のモータリング時間を経過し且つエンジンのクランク角CAが判定用角度範囲Cref内になったときには(ステップS490,S500)、エンジンの回転数が引き下げ制御終了閾値Nrefに至るまでエンジン回転引き下げ制御を実行する。これにより、内燃機関をより精度良く目標回転位置に停止させることができる。
(もっと読む)
物品搬送設備
【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
蓄電装置及びそれに用いられる監視制御装置
【課題】エネルギー損失を小さくできる蓄電装置及びそれに用いられる監視制御装置の提供を課題とする。
【解決手段】上記課題は、複数の単電池セル104がSDスイッチ103によって第1単電池セル群101と第2単電池セル群102とに電気的に解列(分離)されたとき、第1単電池セル群101と第2単電池セル群102との間に構成した接続回路502によって、第1単電池セル群101と第2単電池セル群102との間の同電位の位置関係にある単電池セル104を電気的に並列に接続し、この電気的に並列に接続された単電池セル104の一方から他方に放電させることにより、解決することができる。
(もっと読む)
車両用駆動システム
【課題】 省保守かつ、電源のない走行場所を走行することのできる車両用駆動システムを提供することである。
【解決手段】 少なくとも一つの実施形態の車両用駆動システムは、回転力を生成するエンジン1と、エンジン1と接続され、エンジン1からの回転力により回転する誘導機2と、誘導機2と接続され、誘導機2の残留磁束により生成される交流電力を直流電力に変換するPWMコンバータ3と、PWMコンバータ4と接続され、PWMコンバータ4より生成される直流電力を交流電力に変換するPWMインバータ6と、PWMインバータ6と接続され、PWMインバータ6より生成される交流電力を回転力として回転する電動機7と、PWMコンバータ3とPWMインバータ6の間に接続され、充電を行うことが可能なフィルタコンデンサ5と、PWMコンバータ3とPWMインバータ6の間に接続され、フィルタコンデンサ5の電圧を検出する電圧センサ4を有している。
(もっと読む)
ハイブリッド車
【課題】内燃機関の浄化触媒を暖機する際に、運転者の加速要求により適正に対応する。
【解決手段】浄化触媒の暖機要求がなされたときにおいて、差分パワーΔPrが判定用パワーC1を超えているときには(ステップS170)、要求パワーPr*と冷却水温Twと差分パワーΔPrが判定用パワーC1以下であるときに用いられる第1補正係数設定用マップより補正係数Tarpeを大きくなる傾向に設定する第2補正係数設定用マップとを用いて補正係数Tarpeを設定し(ステップS190)、基本開度Tatrqに補正係数Tarpeを乗じたものを目標スロットル開度TH*に設定し(ステップS200)、エンジンのスロットルバルブの開度を目標スロットル開度にした状態でエンジンを運転しながら要求パワーPr*に基づくパワーにより走行するようエンジンと2つのモータとを制御する(ステップS210〜S250)。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
交流電車のコンバータ制御装置
【課題】コンバータ負荷が小さく、回生ブレーキによるパワーバランスが生じた状態で車両が無電区間に進入した場合でも、次のき電区間進入時に主回路保護動作に至る前にコンバータを停止し、再動作を行う機能を備えたコンバータ制御装置を提供する。
【解決手段】交流架線電源から主変圧器3を介して供給される交流電力を直流電力に変換するコンバータ装置5と、前記直流電力を可変周波数の交流電力に変換し車両駆動用電動機8を制御するインバータ装置6と、前記インバータ装置の直流側に該インバータ装置と並列に接続され、車両内の補助回路に電源を供給する電源装置7と、架線電圧のゼロクロスの間隔が、所定許容変動範囲外の場合は、電源異常と判断する判断手段と、前記判断手段にて電源異常が判断された時、前記コンバータ装置の動作が停止するよう前記コンバータ装置を制御するコンバータ制御手段とを具備する。
(もっと読む)
電気自動車
【課題】大気圧が低いときでも電動機における絶縁性能を確保する。
【解決手段】大気圧が空気環境下でのモータ30における絶縁性能の許容下限に対応する圧力として定められた所定圧力より低いときには、モータ30内からモータ30外への冷却油の放出位置に設けられたバルブ66を閉成する。これにより、モータ30内のコイル46が配置された空間を油密状態にすることができ、大気圧が低いときでもモータ30における絶縁性能を確保することができる。
(もっと読む)
作業車両の電動式走行駆動装置
【課題】作業車両に作用する制動方向と反対方向の外力の変化に対し、ブレーキペダルによる制動の操作性を安定させることができる作業車両の電動式走行駆動装置の提供。
【解決手段】ペダルの踏込み量Rの全範囲を、踏込み量0側の初期範囲rsと、最大値Rmax側の終期範囲reと、これら初期範囲rsと終期範囲reの間の中間範囲rmとに区分し、初期範囲rs内、終期範囲re内、中間範囲rm内のそれぞれの踏込み量Rに対応する制動トルク目標値として第1目標値、第2目標値、第3目標値のそれぞれを演算し、第3目標値の踏込み量Rに対するゲインは第1,第2目標値のどちらの踏込み量Rに対するゲインよりも小さくなるよう設定されており、第3目標値、初期範囲rsの上限値Rv1、終期範囲reの下限値Rv2を外力が大きいほど大きく調整することで、目標制動トルクTR,TLの特性をS1からS3までの間で調整する。
(もっと読む)
車両用制御装置
【課題】誘導電動機に供給される電圧と電流から誘導電動機の加速度を演算して、車輪の空転を抑えながら加速する場合、低速度域において、空転の誤検知が発生して必要以上にトルクを引き下げるという問題点がある。
【解決手段】検出速度が設定値Aより小さい場合は検出速度を選択し、設定値Bより大きい場合は演算速度を選択し、設定値Aより大きく設定値Bより小さい場合は重み付けして速度を出力する速度選択部を備える。一次角周波数ωが0に近いときは検出速度から加速度を演算し、一次角周波数ωが大きいときは演算速度から加速度を演算することができるため、全速度域で空転検知ができる。
(もっと読む)
動力出力装置およびその制御方法並びに車両
【課題】より適正なタイミングで内燃機関から出力されるパワーが目標パワーに近づくよう内燃機関のスロットル開度をフィードバック制御する。
【解決手段】入力制限の絶対値が低温により比較的小さい値になっているとき、始動後経過時間tseが判定用閾値trefに至る前や始動後経過時間tseが判定用閾値trefに至ったとき以降でもエンジンや第1モータに異常が判定されているときにはスロットル開度をフィードフォワード制御し(ステップS120〜S160,S230〜S280)、始動後経過時間tseが判定用閾値tref至ったとき以降であり且つエンジンや第1モータが正常と判定されているときにはエンジンから実際に出力されるパワーが要求パワーPe*に近づくようスロットルバルブの開度をフィードバック制御する(ステップS120〜S150,S170〜S270)。
(もっと読む)
電力変換機の制御装置
【課題】少なくとも平均温度の過渡状態において、脈動する温度の極大値を上回る温度を推定して、素子の熱的保護を効果的に行う。
【解決手段】電力変換機の制御装置は、半導体素子の温度の推定演算を行う周期において、半導体素子の平均損失を算出する平均損失算出部202と、半導体素子を1つの熱抵抗と熱時定数の組205を少なくとも1組有する熱回路網としてとらえて、半導体素子の損失及び熱抵抗と熱時定数の組205から、当該組の部分温度の変化を推定する部分温度変化推定部240とを備える。部分温度変化推定部240は、平均損失から損失の脈動周波数に応じて脈動する部分温度を推定するゲイン206及び一次ローパスフィルタ207を有する。そして、一次ローパスフィルタ207の時定数は、脈動周波数が高いほど熱時定数205に近く設定し、脈動周波数が低いほど熱時定数205よりも小さく設定する。
(もっと読む)
制御装置および制御方法
【課題】等速自在継手の作動角の全域において等速自在継手に対するモータからの過大入力による損傷を未然に防ぐことが可能で、しかも、作動角に大きい領域において等速自在継手性能を有効に活用することができる制御装置及び制御方法を提案する。
【解決手段】電気モータ2を動力源とし、電気モータ2からの動力をドライブシャフト6を介して駆動輪に伝達する車両における制御装置および制御方法である。ドライブシャフト6に用いられる等速自在継手の作動角全域で、ドライブシャフト限界トルク以下にドライブシャフト入力トルクを制限する。
(もっと読む)
1 - 20 / 204
[ Back to top ]