
Fターム[5H115QI15]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 複数の制動手段の組み合わせ (494) | 制動手段の切換 (307) | トルクの和を所定の関係にするもの (243)
Fターム[5H115QI15]の下位に属するFターム
トルクの和を一定にするもの (79)
Fターム[5H115QI15]に分類される特許
1 - 20 / 164
ハイブリッド車両の駆動制御装置
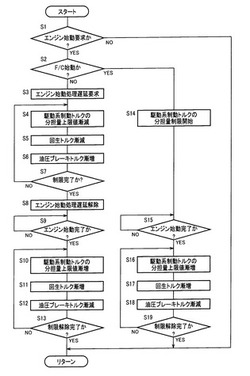
【課題】要求制動トルクをモータジェネレータによる制動トルクおよび機械式ブレーキによる制動トルクの両方で分担する場合に、エンジンを始動する際の駆動力変動をモータジェネレータによって適切に抑制できるようにする。
【解決手段】エンジン12を始動する際に、予め駆動系制動トルクの分担量上限値が制限され、それに伴ってモータジェネレータMGによる制動トルクの分担が低減される一方、その制動トルクの低下を補完するように油圧ブレーキ62による制動トルクの分担が大きくされる。このため、制動トルク制御とエンジン12の始動制御とが重なった場合でも、要求制動トルクに応じた制動トルクを発生させつつモータジェネレータMGによる制動トルクに余裕を残すことができ、そのモータジェネレータMGによる制動トルクの制御でエンジン12の初爆トルクを適切に吸収して駆動力変動を抑制することができる。
(もっと読む)
自動車

【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジンアイドル時の振動や音を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 第1締結要素が解放されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンの燃費を高める第1目標アイドル回転数に設定し、第1締結要素が締結されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンによる共振を抑制する第2目標アイドル回転数に設定するようにした。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードからHEV走行モードへのモード遷移時に、摩擦要素の入力回転数の吹け上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】本発明のハイブリッド車両の制御装置は、摩擦要素(第2クラッチ)CL2をスリップ締結し、摩擦要素CL2を介して伝達される駆動力で走行するエンジン使用スリップ走行モード(WSC走行モード)から、エンジンEngとモータMGの両方の駆動力で走行するハイブリッド車走行モード(HEV走行モード)へモード遷移を行う際、目標駆動トルク制御手段(第2フィルタ処理部)203によって、要求駆動トルクの変化に対して、目標駆動トルクの変化を制限するトルク制限制御を行う。
(もっと読む)
電動車両の制御装置
【課題】変速ショックの抑制と同時に、イナーシャフェーズ中のブレーキのレスポンス向上を図った電動車両の制御装置を提供する。
【解決手段】モータを有する駆動源の下流位置に配設され、摩擦締結要素の掛け替えにより複数の変速段を達成する自動変速機と、前記自動変速機の掛け替えを行う一方、前記モータを発電機として車両にブレーキを掛ける回生ブレーキ、及び機械制動力を利用して車両にブレーキを掛けるメカブレーキを併用する回生協調ブレーキ制御を行う変速制御手段とを備えた電動車両の制御装置であって、前記変速制御手段は、イナーシャフェーズ中にブレーキペダルが更に踏み込まれた場合、その踏み込みによるブレーキ力の増加分を前記メカブレーキで補償する。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
車両のブレーキ制御装置および編成列車のブレーキ制御装置
【課題】従来は回生ブレーキと空気ブレーキの協調制御において空気ブレーキの応答遅れを実回生ブレーキ力に所定の補正量を付加することで補っていたため、車両状態および気温等の外部状態に応じて毎回異なる空気ブレーキの応答遅れに対応できず、回生ブレーキと空気ブレーキの総和が必要なブレーキ力と一致しなかった。
【解決手段】車両のブレーキ制御装置に出力可能な回生ブレーキ力を推定する手段を設け、推定された回生ブレーキ力と必要ブレーキ力から空気ブレーキ力の指令値を決定し、回生ブレーキ力の指令値は必要ブレーキ力と実際に作用した空気ブレーキ力からを決定することで、ブレーキ力の総和を必要ブレーキ力に一致させることができ、さらに現車での補正量調整が不要となる。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】モータで発生する回生電力をバッテリに適切に充電する制御を行うことにより、回生用抵抗器の小型化及びエネルギーの有効利用を図ることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、電力を供給するバッテリBと、バッテリBからの電力によって走行用の駆動力を発生するモータ41と、車両の速度を検出する速度センサ36と、車両の姿勢を検出する3Dジャイロセンサ37と、速度センサ36及び3Dジャイロセンサ37の検出結果に基づいてモータ41で発生する回生電力の電力量を推定する回生電力量推定部38bと、回生電力量推定部38bの推定結果に応じてバッテリBの充電量を制御する充電制御部38bとを備える。
(もっと読む)
電気自動車の制動制御方法
【課題】モータによる回生制動が不可なモータまたはバッテリーの過温時や変速段がN段に操作される場合で回生制動量の急激な減少及び油圧制動装置の油圧応答遅延にて発生する制動力減少を効果的に解消できる電気自動車の制動制御方法を提供する。
【解決手段】本発明の電気自動車の制動制御方法は、回生制動が行われる状態で変速レバーのN段操作を検出する段階と、変速レバーのN段操作を検出した時点からモータの回生制動量を線形的に減少させると同時に、制動量の補償のために油圧制動装置の油圧制動量を増加させる段階と、N段操作の検出時から設定時間が経過すると、変速機のN段変速が行われるようにする段階と、を含む。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
自動列車運転装置
【課題】複雑な調整を必要とせず、ブレーキ装置の動作状態によらず安定な自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部11と、前記列車の走行位置を演算する位置演算部12と、前記列車の目標速度を規定する速度パターン生成部13と、前記速度パターンと前記列車速度に基づきノッチ指令を生成するノッチ制御部14と、前記ノッチ指令に基づき前記列車速度を減少させ、電気ブレーキと空気ブレーキからなるブレーキ装置15と、前記電気ブレーキおよび前記空気ブレーキの動作状態を検出する、ブレーキ状態推定器18を備え、前記ノッチ制御部14は、ブレーキ状態推定器18が回生有効信号とノッチ指令と応荷重信号から算出したブレーキ状態信号に応じてパラメータを調整する
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの運転傾向を考慮して、効率よく回生ブレーキによる電力の回生が行われるように案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、回生ブレーキにより回生された電力を特定する回生電力特定部51aと、車両から対象地物までの距離に基づくタイミングで、車両の減速を促す旨の案内を行う案内部51bと、回生電力特定部51aにより特定された、案内部51bが案内を行ってから対象地物を通過するまでに行われたブレーキ操作に応じて回生ブレーキにより回生された電力に基づき、案内部51bが案内を行うタイミングを設定する設定部51cとを備え、案内部51bは、設定部51cにて設定されたタイミングで新たな案内を行う。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生制動力が不足する制動シーンにおいて、ポンプモータの作動を必要最小限に抑えることで、ポンプモータの耐久信頼性の向上を達成すること。
【解決手段】電動車両のブレーキ制御装置は、ブレーキ液圧発生装置1とVDCブレーキ液圧ユニット2とモータコントローラ8と統合コントローラ9を備えた。ブレーキ液圧発生装置1は、ブレーキ操作に応じた基本液圧を発生する。VDCブレーキ液圧ユニット2は、ポンプモータ21と液圧ポンプ22を有し、基本液圧の増圧・保持・減圧を制御する。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を基本液圧分と回生分の総和で達成し、不足する回生分を基本液圧の加圧分により補償する制御を行うと共に、基本液圧の加圧分による補償制御中、回生制動力が増加方向であるか減少方向であるかに応じてポンプモータ21のオン・オフ制御を行う。
(もっと読む)
車両用ハイブリッド駆動装置
【課題】発進クラッチが遮断されたモータ駆動走行モードから充電制動走行モードへ移行した場合でも、効率良くバッテリーを充電できるとともに大きな制動力が得られるようにする。
【解決手段】発進クラッチ26が遮断されたモータ駆動走行モードでの走行中にブレーキペダルが踏込み操作された場合に、前輪側要求制動力に対応する必要発電トルクTyoukyuが第2モータジェネレータMG2の最大発電トルクTMG2max を超える時には、その発進クラッチ26を締結し、第1モータジェネレータMG1および第2モータジェネレータMG2を何れも発電制御して上記前輪側要求制動力を発生させるとともに、得られた電気エネルギーでバッテリー46を充電する。これにより、2つのモータジェネレータMG1およびMG2を有効に用いてバッテリー46を効率よく充電できるとともに、大きな制動力が得られるようになり、エネルギー効率が向上する。
(もっと読む)
自動車
【課題】液圧ブレーキ装置の液圧調整用のバルブの作動回数が耐久性を考慮した作動回数を超えた以降に、車両の他の部品に比して液圧ブレーキ装置におけるバルブの破損だけが早期に生じるのを抑制しつつ、車両の燃費の悪化を抑制する。
【解決手段】バルブ作動回数Nvに応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し(S110〜S170)、カウンタCが値0以上のときには運転者のブレーキ操作に対してブレーキ協調制御を実行し(S190)、カウンタCが値0未満のときには運転者のブレーキ操作に対してブレーキ協調制御は実行せずに油圧ブレーキ制御を実行する(S200)。これにより、バルブの作動頻度を少なくし、車両の他の部品に比してバルブの破損だけが早期に生じるのを抑制すると共に車両の燃費の悪化を抑制することができる。
(もっと読む)
1 - 20 / 164
[ Back to top ]