
Fターム[5H115QN22]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | 速度位置偏差等に対する演算要素 (1,337) | 比例要素 (232)
Fターム[5H115QN22]に分類される特許
1 - 20 / 232
作業車両
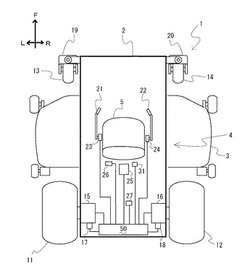
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
ハイブリッド車両およびその制御方法

【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の発生の抑制と車室内の騒音や振動の抑制との両立を図る。
【解決手段】騒音振動抑制制約運転ポイントでエンジンが運転されると共に要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する通常制御を実行するとギヤ機構を介して駆動軸に接続されたモータから出力されるトルクの絶対値が閾値Tref以下となるときには(S170)、そのモータから出力されるトルクが閾値Trefより大きなトルクTsetとなり、エンジンが騒音振動抑制制約運転ポイントより高回転低トルク側で要求パワーPe*を出力する運転ポイントで運転され、要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する(S180〜S230)。
(もっと読む)
ハイブリッド車両
【課題】モータ及びジェネレータを効率よく冷却することで熱による損傷を防止すると共に車両に要求される駆動力を第1及び第2のモータに分配することができるハイブリッド車両を提供する。
【解決手段】ハイブリッド車両1を駆動する第1及び第2モータ2,3と、第1及び第2モータ2,3に電力を供給するバッテリ11と、バッテリ11の残存容量が所定量以下となった際にエンジン5により駆動発電した電力をバッテリ11に供給するジェネレータ4と、ハイブリッド車両1に要求される駆動力を第1及び第2モータ2,3に分配して第1及び第2モータ2,3を駆動する駆動力分配手段60と、前記第1モータ2と前記ジェネレータ4とを冷却する冷却媒体と、冷却媒体の温度を検出する冷却媒体温度検出手段と、を備えるハイブリッド車両において、駆動力分配手段は、冷却媒体の温度に基づいて車両に要求される駆動力を第1及び第2モータ2,3に分配する。
(もっと読む)
電動車両
【課題】複数のスイッチング素子の一部をオフからオンにできなくなるオフ異常が発生していないインバータにより駆動されるモータを用いて走行する状態に迅速に移行する機会を増やしつつ、オフ異常が発生していないインバータを判別する。
【解決手段】2つのモータが駆動されて走行している最中に、バッテリの充放電電流Ibが許容電流範囲外になって2つのインバータのうちのいずれかで1相オープン故障が発生したと判定されたときに(S100,S110)、第2モータのみが駆動されて走行する電動走行が行なわれるようにインバータを制御すると共に第1モータを駆動する方のインバータのゲート遮断を行なう(S120)。そして、電動走行が開始されてから所定時間tb1が経過するまでに充放電電流Ibが許容電流範囲外になったか否かによって、いずれのインバータに1相オープン故障が発生しているかを判定する(S130〜S180)。
(もっと読む)
ハイブリッド車両のエンジン始動時の変速制御システム及び方法
【課題】エンジンの始動中にP段またはN段からD段またはR段への静的変速が行われても、ショックの発生が防止できるハイブリッド車両のエンジン始動時の変速制御システム及び方法を提供する。
【解決手段】エンジンと、第1モータと、第2モータと、エンジンと第1モータとの間を連結する第1遊星ギアセットと、エンジンと第2モータとの間を連結する第2遊星ギアセットとを含むハイブリッド車両のエンジン始動時の変速制御システムで、始動時に第2遊星ギアセットのリングギアに対する目標速度追従のための第2モータの目標速度の入力を受け、第2モータの目標速度に該当するトルクを計算するとともに、計算されたトルクを第2モータに指令するPI制御部40と、エンジンの始動時に、第2モータMG2へ伝達される反力に該当するトルクをフィードフォワードターム制御方式でPI制御部に入力するエンジン摩擦トルクフィードフォワード部30とを含んでいる。
(もっと読む)
ハイブリッド車両のエンジン運転点追従システム及び方法
【課題】第1モータに対する速度制御の性能が低下した状態で、エンジン運転点追従性能を向上できるようにしたハイブリッド車両のエンジン運転点追従システム。
【解決手段】エンジンと、2個のモータと、2組の遊星ギアセットと、を含むハイブリッド車両のエンジン運転点追従システムであって、エンジン目標速度を第1モータの目標速度に変換するエンジン目標速度変化部と、第1モータの目標速度をトルク値に換算するPI制御部と、第1モータのトルク不足分をエンジントルク補償部にフィードバックするアンチワインドアップフィードバック部と、第1モータのトルク不足分をエンジントルク値に変換するトルク変換計算部と、換算されたエンジントルクを追加してエンジン目標トルクを補償し、エンジン運転点をエンジン目標速度に追従させるエンジントルク補償部と、を含んで構成されるハイブリッド車両のエンジン運転点追従システムを提供する。
(もっと読む)
バッテリ充放電制御装置
【課題】ハイブリッド電気自動車のバッテリ充放電制御装置に関し、登坂路走行時に、バッテリの温度上昇に起因したバッテリの充放電電流の抑制を不要にできるようにする。
【解決手段】走行用トルクを出力しうるエンジン1及び電動発電機4と、電動発電機4による発電電力によって充電可能なバッテリ40と、をそなえたハイブリッド電気自動車に装備され、車両の前方の道路状況を取得する手段60と、取得された車両前方の道路状況に基づいて車両前方に登坂路があるか否かを判定する手段30aと、登坂路ありと判定しない限りバッテリ温度がバッテリ40の上限温度近傍の温度よりも高くなった場合にバッテリ40の充放電を制限し、登坂路ありと判定したら車両が登坂路に進入するまではバッテリ40の温度が第1の所定温度よりも低い第2の所定温度よりも高くなった場合にバッテリ40の充放電を制限する制御手段30dと、を備える。
(もっと読む)
電気車制御装置
【課題】 推定回転子位置が真の位置と異なった場合に、インバータの過電流や温度上昇を抑制することが可能な電気車の駆動制御装置を提供する。
【解決手段】 一実施形態に係る電気車制御装置は、直流を任意周波数の交流に変換し、同期電動機4を駆動する電力変換器3と、同期電動機4の回転速度を演算により推定する速度演算部67と、入力されるトルク指令及び速度演算部67により推定された回転速度に基づいて、電力変換器3の出力電圧を制御する制御部61〜64と、速度演算部67により推定された回転速度が異常な値となったことを判別し、制御部61〜64に異常が検出されたことを示す信号を出力する異常判別部73とを具備する。
(もっと読む)
インバータ制御装置および車両
【課題】回転電機の制御応答性を損なわず、トルク脈動の発生を抑制しながらも、積極的に周囲に対して注意を促すための音を発生させるようにする。
【解決手段】インバータ制御装置60は、指令値に対応する電流指令信号を指令する電流指令部61と、回転電機40の鉄心の磁気力により形成される振動を起因とする磁気音を発生させる磁気音信号を指令する磁気音指令部67とを有し、磁気音信号と電流指令信号とを重畳して指令する。この構成によれば、電流指令信号と磁気音信号とは相互に影響しないので、回転電機40の制御応答性を損なわず、トルク脈動の発生を抑制することができる。磁気音信号を重畳することで、積極的に回転電機40から磁気音を発生させて、低速走行時などで周囲に対して注意を促すことができる。
(もっと読む)
モータ制御システム
【課題】モータ制御システムにおいて、矩形波制御方式からPWM制御方式への切替えを適時に行ってモータ過電流の発生を抑制する。
【解決手段】モータ制御システムは、バッテリ電圧をコンバータ35で必要に応じて昇圧してインバータ38に供給し、交流モータ14の運転条件に応じて、インバータ38の制御方式を矩形波制御、過変調PWM制御、正弦波PWM制御の間で選択的に設定する制御装置を備える。制御装置は、モータ電流の電流位相をdq平面上における閾値ラインと比較して矩形波制御方式からPWM制御方式への切り替えを行う制御方式切替部と、矩形波制御方式の実行中で且つインバータ入力電圧であるシステム電圧VHが所定閾値Vthrよりも小さいときにdq平面上における閾値ラインを進角側または低q軸電流側に変更する閾値変更部とを含む。
(もっと読む)
電気車用制御装置
【課題】 1km/h程度の極低速での一定速運転を行い、かつ負荷の変動に対してもダイナミックな応答を提供できる定速制御方法を有する電気車用制御装置を提供することである。
【解決手段】 車軸に取付けられ、車輪を駆動するための駆動力を生成する主電動機
2〜7と、車軸ごとに取り付けられた主電動機2、3、4、5、6、7の個別制御を行う制御ユニット89、10、11、12、13と、目標速度を現在速度に対し比例積分制御を行い、そのうち積分制御を列車制御監視システムの持つ編成共通の速度情報で行い、比例制御を各制御単位の速度センサで行う列車制御監視システム1を有する。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
定速走行制御装置
【課題】定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向けノッチ曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【解決手段】定速走行制御装置において、目標速度204を複数の速度帯304に分割し、車両駆動制御装置の各ノッチの速度−引張力曲線301と、走行抵抗曲線302の交点303に基づいてそれらの速度帯304を設定し、その速度帯1〜5ごとにノッチを算出する制御計算を設定して制御に用いることで、目標速度204に追随して一定の速度で走行できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行モードの切り替えを適切に実施し、運転性を向上させる。
【解決手段】動力源としてのエンジン及びモータジェネレータと、電力源としてのバッテリと、を備えるハイブリッド車両の制御装置であって、アクセル操作量に基づいてアクセル操作速度を算出するアクセル操作速度算出手段(S7)と、アクセル操作量に遅れ処理を施した補正アクセル操作量を算出する補正アクセル操作量算出手段(S7)と、少なくとも蓄電量及び補正アクセル操作量に基づいて、EVモード、又は、HEVモードへの移行を要求する走行モード移行要求手段(S10)と、EVモードへの移行要求があったときに、アクセル操作速度がアクセルペダル踏み込み中と判定できる正のEVモード移行禁止速度よりも大きいときは、EVモードへの移行を禁止するEVモード移行禁止手段(S11)と、を備えることを特徴とする。
(もっと読む)
電力変換装置
【課題】過変調制御が行われる場合において、信号伝達経路等の異常診断頻度の低下を回避するためのスイッチング素子の操作信号を適切に生成することのできる電力変換装置を提供する。
【解決手段】第2セレクタSL2から出力されるスイッチング素子Sjkの操作信号gjkの立ち下がりを入力とし、駆動回路DUから出力される駆動信号djkの変化に基づき、第2セレクタSL2からスイッチング素子Sjkまでの信号伝達経路に異常が生じていないか否かを診断する構成において、過変調制御又は矩形波制御によってモータジェネレータの制御が行われる場合、第2セレクタSLから操作信号gjkとしてオン操作信号が出力される期間に、出力されるオン操作信号をオフ操作信号に強制的に変更する。
(もっと読む)
物品搬送設備
【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
制御装置
【課題】走行抵抗トルク、又はブレーキトルクなどの外乱トルクをキャンセルすることなく、車両の動力伝達系に生じる軸ねじれ振動を抑制することができる回転電機の制御装置が求められる。
【解決手段】回転電機の回転速度ωmに基づき、動力伝達系の振動成分を低減するとともに、伝達系入力トルクTinを推定し、回転電機の出力トルクTmを減算して外部入力トルクTwを推定する外部入力推定器41と、外部入力トルクTwと、車両要求トルクTrとに基づいて、低振動回転速度ωm^を算出する低振動速度算出器42と、回転電機の回転速度ωmを低振動回転速度ωm^に一致させるようなフィードバック指令トルクTpを算出する回転速度制御器43と、出力トルク指令値Tmoを算出するトルク指令値算出器44と、を備える回転電機の制御装置。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】インバータを用いた交流電動機制御において、効率を低下させることなくインバータのスイッチングによるサージ電圧を抑制する。
【解決手段】交流制御指令(Vu)とキャリア信号(Vcw)との電圧比較に基づいて、インバータ各相のスイッチング素子のオンオフが制御される。交流制御指令(Vu)は、三相変調のための本来の交流電圧指令(Vu♯)に、3次高調波電圧(Vuh)を重畳することによって得られる。3次高調波電圧(Vuh)は、相電流の特定タイミング(tp1、tp2)を含む所定の電流位相期間(T1)において、当該相でのスイッチング素子のオンオフが固定されるように設定される。
(もっと読む)
動力出力装置およびその制御方法並びに車両
【課題】より適正なタイミングで内燃機関から出力されるパワーが目標パワーに近づくよう内燃機関のスロットル開度をフィードバック制御する。
【解決手段】入力制限の絶対値が低温により比較的小さい値になっているとき、始動後経過時間tseが判定用閾値trefに至る前や始動後経過時間tseが判定用閾値trefに至ったとき以降でもエンジンや第1モータに異常が判定されているときにはスロットル開度をフィードフォワード制御し(ステップS120〜S160,S230〜S280)、始動後経過時間tseが判定用閾値tref至ったとき以降であり且つエンジンや第1モータが正常と判定されているときにはエンジンから実際に出力されるパワーが要求パワーPe*に近づくようスロットルバルブの開度をフィードバック制御する(ステップS120〜S150,S170〜S270)。
(もっと読む)
1 - 20 / 232
[ Back to top ]