
ハイブリッド車両のエンジン運転点追従システム及び方法
【課題】第1モータに対する速度制御の性能が低下した状態で、エンジン運転点追従性能を向上できるようにしたハイブリッド車両のエンジン運転点追従システム。
【解決手段】エンジンと、2個のモータと、2組の遊星ギアセットと、を含むハイブリッド車両のエンジン運転点追従システムであって、エンジン目標速度を第1モータの目標速度に変換するエンジン目標速度変化部と、第1モータの目標速度をトルク値に換算するPI制御部と、第1モータのトルク不足分をエンジントルク補償部にフィードバックするアンチワインドアップフィードバック部と、第1モータのトルク不足分をエンジントルク値に変換するトルク変換計算部と、換算されたエンジントルクを追加してエンジン目標トルクを補償し、エンジン運転点をエンジン目標速度に追従させるエンジントルク補償部と、を含んで構成されるハイブリッド車両のエンジン運転点追従システムを提供する。
【解決手段】エンジンと、2個のモータと、2組の遊星ギアセットと、を含むハイブリッド車両のエンジン運転点追従システムであって、エンジン目標速度を第1モータの目標速度に変換するエンジン目標速度変化部と、第1モータの目標速度をトルク値に換算するPI制御部と、第1モータのトルク不足分をエンジントルク補償部にフィードバックするアンチワインドアップフィードバック部と、第1モータのトルク不足分をエンジントルク値に変換するトルク変換計算部と、換算されたエンジントルクを追加してエンジン目標トルクを補償し、エンジン運転点をエンジン目標速度に追従させるエンジントルク補償部と、を含んで構成されるハイブリッド車両のエンジン運転点追従システムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両のエンジン運転点追従システム及び方法に係り、より詳細には、速度制御を行うモータのトルクが不足した状況下でもエンジン運転点の変更に迅速に追従することができるようにしたハイブリッド車両のエンジン運転点追従システム及び方法に関する。
【背景技術】
【0002】
ハイブリッド車両とは、エンジンと共にモータ駆動源を補助動力源として採択し、排気ガスの低減及び燃費向上を図ることができるようにした未来型車両を言う(例えば特許文献1を参照)。
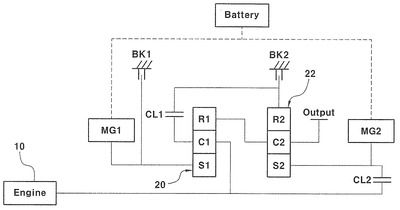
図1に、ハイブリッド車両の動力伝達のためのパワートレイン構成の一例を示す。図1に示すハイブリッド車両のパワートレインは、エンジン10と、第1モータMG1及び第2モータMG2と、一対の遊星ギアセット20、22と、を含む構成である。
【0003】
エンジン10の出力軸は、第1遊星ギアセット20のキャリアC1と連結されるとともに、第2クラッチCL2を介して第2遊星ギアセット22を介して第2サンギアS2と連結される。
また、第1モータMG1の出力軸は、第1遊星ギアセット20のサンギアS1と直結しており、第2モータMG2の出力軸は、第2遊星ギアセット22の第2サンギアS2に直結している。
【0004】
このとき、上記第1遊星ギアセット20のリングギアR1と第2遊星ギアセット22のキャリアC2とが連結され、この第2遊星ギアセット22のキャリアC2は最終の出力軸と連結される。
また、上記第1遊星ギアセット20のキャリアC1の出力側と第2遊星ギアセット22のリングギアR2とが第1クラッチCL1を介して連結される。
【0005】
また、上記第1モータMG1と第1遊星ギアセット20のサンギアS1との間の連結軸には、第1ブレーキBK1が装着され、第1遊星ギアセット20のキャリアC1の出力側と第2遊星ギアセット22のリングギアR2とを連結する軸には、第2ブレーキBK2が装着される。
【0006】
このようなハイブリッド車両のパワートレイン構造において、第1モータMG1を用いた変速制御をするモードが存在し、エンジン10の運転点は、第1モータMG1による変速制御により決定される。
【0007】
即ち、第1モータMG1の出力軸は、第1遊星ギアセット20のサンギアS1と連結され、エンジン10の出力軸は、第1遊星ギアセット20のサンギアS1と遊星ギア(ピニオン)により動力伝達が可能に連結されるキャリアC1と直結されている。このため、第1モータMG1のトルクは、エンジン10のトルクを車軸に伝達するための反力トルクとして作用するので、第1モータMG1の変速制御によりエンジン10の運転点を決定することができる。
【0008】
しかし、上記のようなハイブリッド車両のパワートレインシステムの場合、第1モータMG1にパワー制限がかかるか、または、第1モータMG1が出力できるトルク限界以上のトルクが必要な状況でエンジン運転点を変更する際に、第1モータMG1のトルク不足によってエンジン運転点変更の追従性能が低下するという問題が起きることがある。
エンジン運転点に対する追従性能が低下した場合には、燃費効率が最も高い運転状態に到達できなくなり、また燃費及びバッテリの充電状態(SOC)のバランシングに悪影響を及ぼすことがあるという問題もある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−150627号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、上記のような問題を解決するためになされたものであって、第1モータが目標速度を基にエンジンの運転点を決定する変速制御を行うとき、第1モータMG1にパワー制限がかかるか、または、最大トルクを出すにもかかわらずエンジン運転点の変更が困難な状況、即ちアンチワインドアップターム(Anti−windup term)が発生した状況においても、目標速度まで迅速に追従できるようにしたハイブリッド車両のエンジン運転点追従システム及び方法を提供することにその目的がある。
【課題を解決するための手段】
【0011】
上記目的を達成するための本発明の一つの具体例は、エンジンクランキング及びエンジン速度を変速制御する第1モータMG1と、車軸にトルクを直接伝達するトラクションモータである第2モータMG2と、エンジン10と第1モータMG1との間を連結する第1遊星ギアセット20と、エンジン10と第2モータMG2との間を連結する第2遊星ギアセット22と、を含むハイブリッド車両のエンジン運転点追従システムであって、
エンジン目標速度を第1モータMG1の目標速度に変換するエンジン目標速度変化部12と、第1モータMG1の目標速度を基にして、第1モータMG1で出力するべきトルクを計算し、出力を指令するPI制御部24と、第1モータMG1のトルクの不足によって、エンジン10の運転点がエンジン目標速度に変更されなかったとき、第1モータMG1のトルク不足分をエンジントルク補償部40にフィードバックするアンチワインドアップフィードバック部30と、第1モータMG1のトルク不足分をエンジントルクに換算するトルク変換計算部42と、換算したエンジントルクを追加し、目標トルクを補償して出力することを指令するエンジントルク補償部40と、を含んで構成されることを特徴とする。
【0012】
上記目的を達成するための本発明の他の具体例は、エンジン運転点を決定するために、エンジン目標速度に対応する第1モータMG1の目標速度を算出する段階と、第1モータMG1の目標速度を基に、第1モータMG1に対する指令トルクを計算する段階と、第1モータMG1に指令トルクを出力するように指令したにもかかわらず、エンジン運転点がエンジン目標速度に変更されなかったことを検知する段階と、エンジンの運転点がエンジン目標速度に変更されるようにエンジントルクを補償する段階と、を含むことを特徴とするハイブリッド車両のエンジン運転点追従方法を提供する。
【0013】
また本発明は、エンジン10の運転点とエンジン目標速度の差を検知し、この差を第1モータMG1のトルク不足分であるアンチワインドアップタームとすることを特徴とする。
【0014】
更に本発明は、エンジントルクを補償する段階が、アンチワインドアップタームを検知し、エンジントルク補償部40へフィードバックする過程と、アンチワインドアップタームをエンジントルクに換算する過程と、エンジントルクを追加することによってエンジン目標トルクを補償し、エンジン10にエンジン目標トルクを出力するよう指令する過程と、からなることを特徴とする。
【発明の効果】
【0015】
本発明によれば、第1モータがエンジン目標速度を基にエンジンの運転点を決定する変速制御を行うとき、パワー制限がかかるか、または、最大トルクを出すにもかかわらずエンジン運転点の変更が困難なアンチワインドアップタームが発生した場合においても、アンチワインドアップタームを補償ロジックへフィードバックさせてエンジントルクに追加してエンジン目標トルクを補償することにより、エンジンの運転点が目標速度に迅速に変更される。
【図面の簡単な説明】
【0016】
【図1】本発明によるハイブリッド車両のエンジン運転点追従システム及び方法が適用されるパワートレイン構成図である。
【図2】本発明によるハイブリッド車両のエンジン運転点追従システムを示す構成図である。
【図3】本発明によるハイブリッド車両のエンジン運転点追従方法を説明するフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の望ましい実施例を添付図面を参照して詳細に説明する。
図1は、本発明によるハイブリッド車両のエンジン運転点追従システム及び方法が適用されるパワートレイン構成図である。
図1に示すように、本発明に係るハイブリッド車両のエンジン運転点追従システム及び方法は、エンジン10と、エンジンクランキング及びエンジン10の速度を変速制御する第1モータMG1と、車軸にトルクを直接伝達するトラクションモータである第2モータMG2と、2組の遊星ギアセット20、22と、を含んで構成される。
ここで、第1モータMG1は、目標速度を基に変速制御を行ってエンジン運転点を決定するために、エンジントルクを車軸に伝達するための反力トルクを出力し、それによって変速のための速度制御を行う。
【0018】
本発明は、第1モータMG1が目標速度を基にエンジン10の運転点を決定する変速制御を行うときに、第1モータMG1にパワー制限がかかるか、または、最大トルクを出すにもかかわらずエンジン運転点の変更が困難な状況、即ちアンチワインドアップタームが発生したことを感知し、第1モータMG1の不足トルクを、エンジントルクによって補償して目標トルクに迅速に到達する方法及び装置に関する。
【0019】
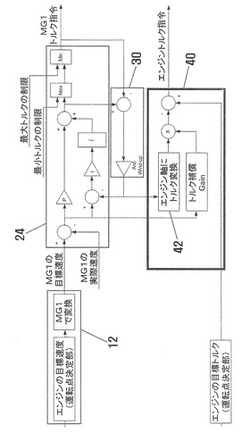
図2は、本発明によるハイブリッド車両のエンジン運転点追従システムを示す構成図である。図2に示すように、第1モータMG1によってエンジン10がクランキングされると共に、目標速度がモータ制御器に入力されると、エンジン10の出力軸及び第1モータMG1の出力軸は互いに異なる軸を有するようになるので、エンジン目標速度変化部12でエンジン目標速度を第1モータの軸に該当する値、即ち第1モータMG1の目標速度に変換する。
【0020】
次に、第1モータMG1の目標速度がPI制御部24に入力されると、所定の比例積分演算ロジックを経て第1モータの目標速度に対応するトルクを計算し、計算されたトルクを第1モータに指令する。
このとき、PI制御部24で計算された第1モータのトルクは、最小トルクの制限値及び最大トルクの制限値の範囲内に限定された値で出力される。
【0021】
しかし、第1モータMG1にパワー制限がかかるか、または、第1モータMG1が出力できるトルク限界以上のトルクが必要な状況(例えば、第1モータの最大トルクの制限値以上のトルクがなければエンジン目標速度が到達できない状況)では、エンジン運転点の変更の際、第1モータMG1はPI制御部24の目標速度の指令に対応できず、運転点への追従性能が低下する。
【0022】
本発明は、第1モータMG1がPI制御部24の目標速度の指令に対応できず、エンジン運転点の変更が困難な状況であっても、第1モータMG1のトルクをエンジントルクによって補償することにより、エンジン10が目標速度の変更に迅速に追従することを特徴とする。
【0023】
図2を参照して、本発明に係るハイブリッド車両用のエンジン運転点追従方法を説明する。
本発明のハイブリッド車両用のエンジン運転点追従システムは、エンジン目標速度変化部12の一部であって、エンジン目標速度を決定する運転点決定部と、運転点決定部で決定されたエンジン目標速度を第1モータMG1の目標速度に変換するエンジン目標速度変化部12と、第1モータMG1の目標速度を基にして、第1モータMG1に対するトルクを計算して出力指令するPI制御部24と、アンチワインドアップタームをエンジントルク補償部40へフィードバックするアンチワインドアップフィードバック部30と、エンジントルク補償部40の一部であってアンチワインドアップタームをエンジントルクに換算するトルク変換計算部42と、換算されたエンジントルクをエンジン10に追加するように指令するトルク変換計算部42と、を含んで構成される。
【0024】
エンジン10の運転点を変更するには、エンジン目標速度変化部12が、エンジン目標速度変化部12の運転点決定部に入力されたエンジン10の目標速度から、エンジン10の目標速度に対応して速度制御ができるように第1モータMG1の目標速度を算出する。
第1モータMG1の目標速度がPI制御部24に入力されると、PI制御部24は、第1モータの目標速度を基に第1モータに対するトルクを計算し、計算されたトルクを出力するように第1モータMG1に指令する。
【0025】
通常運転の状態においては、第1モータMG1は、エンジン全体の出力をエンジン10と分担し、エンジン10の回転数にかかわらずエンジン10の最終出力をエンジン10の目標速度に制御する。即ち、第1モータMG1は、指令されたトルクを出力して第1モータMG1を駆動することにより、エンジン10の運転点が目標速度に変更される。エンジン10と第1モータMG1との出力比はバッテーリの充電量その他の要素によって別途に決定される。
【0026】
一方、第1モータMG1にパワー制限がかかるか、または、第1モータMG1が最大トルクを出すにもかかわらずエンジン目標速度への運転点の変更が困難な状況においては、エンジン10の運転点が目標速度における最適な運転点に追従できない状況、即ちアンチワインドアップタームが発生する。アンチワインドアップタームの発生状態が長く連続すると、バッテリの充放電バランスが崩され、バッテリの充電量(SOC)の管理が難しく、これによる燃費低下が発生し得る。
【0027】
そこで、運転点に早く追従するためのエンジントルク補償方法として、アンチワインドアップフィードバック部30は、エンジン目標速度に到達できるトルクに対する第1モータMG1トルクの不足分であるアンチワインドアップタームを検知し、このトルク不足分をエンジントルク補償部40へフィードバックし、エンジントルクを補償する。
【0028】
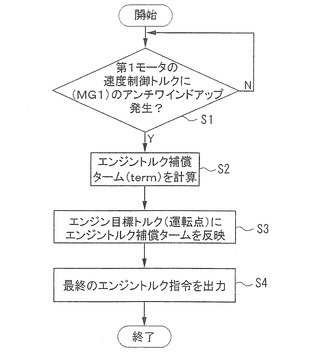
図3は、本発明によるハイブリッド車両のエンジン運転点追従方法を説明するフローチャートである。図3を用いて、本発明にかかるハイブリッド車両用のエンジン運転点追従方法を詳細に説明する。
第1モータMG1の目標速度を基に計算され、第1モータに指令されたトルクを印加したにもかかわらず、エンジン10の運転点が目標速度に変更されなかったとき、アンチワインドアップフィードバック部30はアンチワインドアップタームが発生したと判断する(S1)。
【0029】
次いで、アンチワインドアップフィードバック部30はエンジン10が目標速度に到達できるだけのトルクに相当するするアンチワインドアップタームを検知し、エンジントルク補償部40へフィードバックする。
エンジントルク補償部40のトルク変換計算部42は、アンチワインドアップタームに相当するをエンジントルク補償タームを計算する(S2)。
【0030】
エンジン10及び第1モータMG1の出力軸は互いに異なる軸を有するようになるので、エンジントルク補償部40は、アンチワインドアップタームに相当するエンジントルク補償タームをエンジントルクに追加し、エンジントルク補償タームをエンジン目標トルクに反映させる(S3)。
最終的に、エンジントルク補償部40は、エンジントルク補償タームをエンジン目標トルクに追加し最終のエンジントルクを指令する(S4)。補償されたエンジン目標トルクによってエンジン目標速度に速く到達できるようになる。
【符号の説明】
【0031】
10 エンジン
12 エンジン目標速度変化部
20 第1遊星ギアセット
22 第2遊星ギアセット
24 PI制御部
30 アンチワインドアップフィードバック部
40 エンジントルク補償部
42 トルク変換計算部
MG1 第1モータ
MG2 第2モータ
【技術分野】
【0001】
本発明は、ハイブリッド車両のエンジン運転点追従システム及び方法に係り、より詳細には、速度制御を行うモータのトルクが不足した状況下でもエンジン運転点の変更に迅速に追従することができるようにしたハイブリッド車両のエンジン運転点追従システム及び方法に関する。
【背景技術】
【0002】
ハイブリッド車両とは、エンジンと共にモータ駆動源を補助動力源として採択し、排気ガスの低減及び燃費向上を図ることができるようにした未来型車両を言う(例えば特許文献1を参照)。
図1に、ハイブリッド車両の動力伝達のためのパワートレイン構成の一例を示す。図1に示すハイブリッド車両のパワートレインは、エンジン10と、第1モータMG1及び第2モータMG2と、一対の遊星ギアセット20、22と、を含む構成である。
【0003】
エンジン10の出力軸は、第1遊星ギアセット20のキャリアC1と連結されるとともに、第2クラッチCL2を介して第2遊星ギアセット22を介して第2サンギアS2と連結される。
また、第1モータMG1の出力軸は、第1遊星ギアセット20のサンギアS1と直結しており、第2モータMG2の出力軸は、第2遊星ギアセット22の第2サンギアS2に直結している。
【0004】
このとき、上記第1遊星ギアセット20のリングギアR1と第2遊星ギアセット22のキャリアC2とが連結され、この第2遊星ギアセット22のキャリアC2は最終の出力軸と連結される。
また、上記第1遊星ギアセット20のキャリアC1の出力側と第2遊星ギアセット22のリングギアR2とが第1クラッチCL1を介して連結される。
【0005】
また、上記第1モータMG1と第1遊星ギアセット20のサンギアS1との間の連結軸には、第1ブレーキBK1が装着され、第1遊星ギアセット20のキャリアC1の出力側と第2遊星ギアセット22のリングギアR2とを連結する軸には、第2ブレーキBK2が装着される。
【0006】
このようなハイブリッド車両のパワートレイン構造において、第1モータMG1を用いた変速制御をするモードが存在し、エンジン10の運転点は、第1モータMG1による変速制御により決定される。
【0007】
即ち、第1モータMG1の出力軸は、第1遊星ギアセット20のサンギアS1と連結され、エンジン10の出力軸は、第1遊星ギアセット20のサンギアS1と遊星ギア(ピニオン)により動力伝達が可能に連結されるキャリアC1と直結されている。このため、第1モータMG1のトルクは、エンジン10のトルクを車軸に伝達するための反力トルクとして作用するので、第1モータMG1の変速制御によりエンジン10の運転点を決定することができる。
【0008】
しかし、上記のようなハイブリッド車両のパワートレインシステムの場合、第1モータMG1にパワー制限がかかるか、または、第1モータMG1が出力できるトルク限界以上のトルクが必要な状況でエンジン運転点を変更する際に、第1モータMG1のトルク不足によってエンジン運転点変更の追従性能が低下するという問題が起きることがある。
エンジン運転点に対する追従性能が低下した場合には、燃費効率が最も高い運転状態に到達できなくなり、また燃費及びバッテリの充電状態(SOC)のバランシングに悪影響を及ぼすことがあるという問題もある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−150627号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、上記のような問題を解決するためになされたものであって、第1モータが目標速度を基にエンジンの運転点を決定する変速制御を行うとき、第1モータMG1にパワー制限がかかるか、または、最大トルクを出すにもかかわらずエンジン運転点の変更が困難な状況、即ちアンチワインドアップターム(Anti−windup term)が発生した状況においても、目標速度まで迅速に追従できるようにしたハイブリッド車両のエンジン運転点追従システム及び方法を提供することにその目的がある。
【課題を解決するための手段】
【0011】
上記目的を達成するための本発明の一つの具体例は、エンジンクランキング及びエンジン速度を変速制御する第1モータMG1と、車軸にトルクを直接伝達するトラクションモータである第2モータMG2と、エンジン10と第1モータMG1との間を連結する第1遊星ギアセット20と、エンジン10と第2モータMG2との間を連結する第2遊星ギアセット22と、を含むハイブリッド車両のエンジン運転点追従システムであって、
エンジン目標速度を第1モータMG1の目標速度に変換するエンジン目標速度変化部12と、第1モータMG1の目標速度を基にして、第1モータMG1で出力するべきトルクを計算し、出力を指令するPI制御部24と、第1モータMG1のトルクの不足によって、エンジン10の運転点がエンジン目標速度に変更されなかったとき、第1モータMG1のトルク不足分をエンジントルク補償部40にフィードバックするアンチワインドアップフィードバック部30と、第1モータMG1のトルク不足分をエンジントルクに換算するトルク変換計算部42と、換算したエンジントルクを追加し、目標トルクを補償して出力することを指令するエンジントルク補償部40と、を含んで構成されることを特徴とする。
【0012】
上記目的を達成するための本発明の他の具体例は、エンジン運転点を決定するために、エンジン目標速度に対応する第1モータMG1の目標速度を算出する段階と、第1モータMG1の目標速度を基に、第1モータMG1に対する指令トルクを計算する段階と、第1モータMG1に指令トルクを出力するように指令したにもかかわらず、エンジン運転点がエンジン目標速度に変更されなかったことを検知する段階と、エンジンの運転点がエンジン目標速度に変更されるようにエンジントルクを補償する段階と、を含むことを特徴とするハイブリッド車両のエンジン運転点追従方法を提供する。
【0013】
また本発明は、エンジン10の運転点とエンジン目標速度の差を検知し、この差を第1モータMG1のトルク不足分であるアンチワインドアップタームとすることを特徴とする。
【0014】
更に本発明は、エンジントルクを補償する段階が、アンチワインドアップタームを検知し、エンジントルク補償部40へフィードバックする過程と、アンチワインドアップタームをエンジントルクに換算する過程と、エンジントルクを追加することによってエンジン目標トルクを補償し、エンジン10にエンジン目標トルクを出力するよう指令する過程と、からなることを特徴とする。
【発明の効果】
【0015】
本発明によれば、第1モータがエンジン目標速度を基にエンジンの運転点を決定する変速制御を行うとき、パワー制限がかかるか、または、最大トルクを出すにもかかわらずエンジン運転点の変更が困難なアンチワインドアップタームが発生した場合においても、アンチワインドアップタームを補償ロジックへフィードバックさせてエンジントルクに追加してエンジン目標トルクを補償することにより、エンジンの運転点が目標速度に迅速に変更される。
【図面の簡単な説明】
【0016】
【図1】本発明によるハイブリッド車両のエンジン運転点追従システム及び方法が適用されるパワートレイン構成図である。
【図2】本発明によるハイブリッド車両のエンジン運転点追従システムを示す構成図である。
【図3】本発明によるハイブリッド車両のエンジン運転点追従方法を説明するフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の望ましい実施例を添付図面を参照して詳細に説明する。
図1は、本発明によるハイブリッド車両のエンジン運転点追従システム及び方法が適用されるパワートレイン構成図である。
図1に示すように、本発明に係るハイブリッド車両のエンジン運転点追従システム及び方法は、エンジン10と、エンジンクランキング及びエンジン10の速度を変速制御する第1モータMG1と、車軸にトルクを直接伝達するトラクションモータである第2モータMG2と、2組の遊星ギアセット20、22と、を含んで構成される。
ここで、第1モータMG1は、目標速度を基に変速制御を行ってエンジン運転点を決定するために、エンジントルクを車軸に伝達するための反力トルクを出力し、それによって変速のための速度制御を行う。
【0018】
本発明は、第1モータMG1が目標速度を基にエンジン10の運転点を決定する変速制御を行うときに、第1モータMG1にパワー制限がかかるか、または、最大トルクを出すにもかかわらずエンジン運転点の変更が困難な状況、即ちアンチワインドアップタームが発生したことを感知し、第1モータMG1の不足トルクを、エンジントルクによって補償して目標トルクに迅速に到達する方法及び装置に関する。
【0019】
図2は、本発明によるハイブリッド車両のエンジン運転点追従システムを示す構成図である。図2に示すように、第1モータMG1によってエンジン10がクランキングされると共に、目標速度がモータ制御器に入力されると、エンジン10の出力軸及び第1モータMG1の出力軸は互いに異なる軸を有するようになるので、エンジン目標速度変化部12でエンジン目標速度を第1モータの軸に該当する値、即ち第1モータMG1の目標速度に変換する。
【0020】
次に、第1モータMG1の目標速度がPI制御部24に入力されると、所定の比例積分演算ロジックを経て第1モータの目標速度に対応するトルクを計算し、計算されたトルクを第1モータに指令する。
このとき、PI制御部24で計算された第1モータのトルクは、最小トルクの制限値及び最大トルクの制限値の範囲内に限定された値で出力される。
【0021】
しかし、第1モータMG1にパワー制限がかかるか、または、第1モータMG1が出力できるトルク限界以上のトルクが必要な状況(例えば、第1モータの最大トルクの制限値以上のトルクがなければエンジン目標速度が到達できない状況)では、エンジン運転点の変更の際、第1モータMG1はPI制御部24の目標速度の指令に対応できず、運転点への追従性能が低下する。
【0022】
本発明は、第1モータMG1がPI制御部24の目標速度の指令に対応できず、エンジン運転点の変更が困難な状況であっても、第1モータMG1のトルクをエンジントルクによって補償することにより、エンジン10が目標速度の変更に迅速に追従することを特徴とする。
【0023】
図2を参照して、本発明に係るハイブリッド車両用のエンジン運転点追従方法を説明する。
本発明のハイブリッド車両用のエンジン運転点追従システムは、エンジン目標速度変化部12の一部であって、エンジン目標速度を決定する運転点決定部と、運転点決定部で決定されたエンジン目標速度を第1モータMG1の目標速度に変換するエンジン目標速度変化部12と、第1モータMG1の目標速度を基にして、第1モータMG1に対するトルクを計算して出力指令するPI制御部24と、アンチワインドアップタームをエンジントルク補償部40へフィードバックするアンチワインドアップフィードバック部30と、エンジントルク補償部40の一部であってアンチワインドアップタームをエンジントルクに換算するトルク変換計算部42と、換算されたエンジントルクをエンジン10に追加するように指令するトルク変換計算部42と、を含んで構成される。
【0024】
エンジン10の運転点を変更するには、エンジン目標速度変化部12が、エンジン目標速度変化部12の運転点決定部に入力されたエンジン10の目標速度から、エンジン10の目標速度に対応して速度制御ができるように第1モータMG1の目標速度を算出する。
第1モータMG1の目標速度がPI制御部24に入力されると、PI制御部24は、第1モータの目標速度を基に第1モータに対するトルクを計算し、計算されたトルクを出力するように第1モータMG1に指令する。
【0025】
通常運転の状態においては、第1モータMG1は、エンジン全体の出力をエンジン10と分担し、エンジン10の回転数にかかわらずエンジン10の最終出力をエンジン10の目標速度に制御する。即ち、第1モータMG1は、指令されたトルクを出力して第1モータMG1を駆動することにより、エンジン10の運転点が目標速度に変更される。エンジン10と第1モータMG1との出力比はバッテーリの充電量その他の要素によって別途に決定される。
【0026】
一方、第1モータMG1にパワー制限がかかるか、または、第1モータMG1が最大トルクを出すにもかかわらずエンジン目標速度への運転点の変更が困難な状況においては、エンジン10の運転点が目標速度における最適な運転点に追従できない状況、即ちアンチワインドアップタームが発生する。アンチワインドアップタームの発生状態が長く連続すると、バッテリの充放電バランスが崩され、バッテリの充電量(SOC)の管理が難しく、これによる燃費低下が発生し得る。
【0027】
そこで、運転点に早く追従するためのエンジントルク補償方法として、アンチワインドアップフィードバック部30は、エンジン目標速度に到達できるトルクに対する第1モータMG1トルクの不足分であるアンチワインドアップタームを検知し、このトルク不足分をエンジントルク補償部40へフィードバックし、エンジントルクを補償する。
【0028】
図3は、本発明によるハイブリッド車両のエンジン運転点追従方法を説明するフローチャートである。図3を用いて、本発明にかかるハイブリッド車両用のエンジン運転点追従方法を詳細に説明する。
第1モータMG1の目標速度を基に計算され、第1モータに指令されたトルクを印加したにもかかわらず、エンジン10の運転点が目標速度に変更されなかったとき、アンチワインドアップフィードバック部30はアンチワインドアップタームが発生したと判断する(S1)。
【0029】
次いで、アンチワインドアップフィードバック部30はエンジン10が目標速度に到達できるだけのトルクに相当するするアンチワインドアップタームを検知し、エンジントルク補償部40へフィードバックする。
エンジントルク補償部40のトルク変換計算部42は、アンチワインドアップタームに相当するをエンジントルク補償タームを計算する(S2)。
【0030】
エンジン10及び第1モータMG1の出力軸は互いに異なる軸を有するようになるので、エンジントルク補償部40は、アンチワインドアップタームに相当するエンジントルク補償タームをエンジントルクに追加し、エンジントルク補償タームをエンジン目標トルクに反映させる(S3)。
最終的に、エンジントルク補償部40は、エンジントルク補償タームをエンジン目標トルクに追加し最終のエンジントルクを指令する(S4)。補償されたエンジン目標トルクによってエンジン目標速度に速く到達できるようになる。
【符号の説明】
【0031】
10 エンジン
12 エンジン目標速度変化部
20 第1遊星ギアセット
22 第2遊星ギアセット
24 PI制御部
30 アンチワインドアップフィードバック部
40 エンジントルク補償部
42 トルク変換計算部
MG1 第1モータ
MG2 第2モータ
【特許請求の範囲】
【請求項1】
エンジン(10)と、エンジンクランキング及びエンジン速度を変速制御する第1モータ(MG1)と、車軸にトルクを直接伝達するトラクションモータである第2モータ(MG2)と、前記エンジン(10)と第1モータ(MG1)との間を連結する第1遊星ギアセット(20)と、前記エンジン(10)と第2モータ(MG2)との間を連結する第2遊星ギアセット(22)と、を含むハイブリッド車両のエンジン運転点追従システムであって、
エンジン目標速度を前記第1モータ(MG1)の目標速度に変換するエンジン目標速度変化部(12)と、
前記第1モータ(MG1)の目標速度を基にして、前記第1モータ(MG1)で出力するべきトルクを計算し、出力を指令するPI制御部(24)と、
前記第1モータ(MG1)のトルクの不足によって、前記エンジン(10)の運転点が前記エンジン目標速度に変更されなかったとき、前記第1モータ(MG1)のトルク不足分をエンジントルク補償部(40)にフィードバックするアンチワインドアップフィードバック部(30)と、
前記第1モータ(MG1)のトルク不足分をエンジントルクに換算するトルク変換計算部(42)と、
換算したエンジントルクを追加し、目標トルクを補償して出力することを指令するエンジントルク補償部(40)と、
を含んで構成されることを特徴とするハイブリッド車両のエンジン運転点追従システム。
【請求項2】
エンジン運転点を決定するために、エンジン目標速度に対応する第1モータ(MG1)の目標速度を算出する段階と、
前記第1モータ(MG1)の目標速度を基に、前記第1モータ(MG1)に対する指令トルクを計算する段階と、
前記第1モータ(MG1)に前記指令トルクを出力するように指令したにもかかわらず、エンジン運転点が前記エンジン目標速度に変更されなかったことを検知する段階と、
エンジン(10)の運転点が前記エンジン目標速度に変更されるようにエンジントルクを補償する段階と、
を含むことを特徴とする、ハイブリッド車両のエンジン運転点追従方法。
【請求項3】
エンジン(10)の運転点とエンジン目標速度の差を検知し、この差を前記第1モータ(MG1)のトルク不足分であるアンチワインドアップタームとすることを特徴とする、請求項2に記載のハイブリッド車両のエンジン運転点追従方法。
【請求項4】
前記エンジントルクを補償する段階は、前記アンチワインドアップタームを検知し、エンジントルク補償部(40)へフィードバックする過程と、前記アンチワインドアップタームをエンジントルクに換算する過程と、前記エンジントルクを追加することによってエンジン目標トルクを補償し、前記エンジン(10)に前記エンジン目標トルクを出力するよう指令する過程と、からなることを特徴とする請求項2に記載のハイブリッド車両のエンジン運転点追従方法。
【請求項1】
エンジン(10)と、エンジンクランキング及びエンジン速度を変速制御する第1モータ(MG1)と、車軸にトルクを直接伝達するトラクションモータである第2モータ(MG2)と、前記エンジン(10)と第1モータ(MG1)との間を連結する第1遊星ギアセット(20)と、前記エンジン(10)と第2モータ(MG2)との間を連結する第2遊星ギアセット(22)と、を含むハイブリッド車両のエンジン運転点追従システムであって、
エンジン目標速度を前記第1モータ(MG1)の目標速度に変換するエンジン目標速度変化部(12)と、
前記第1モータ(MG1)の目標速度を基にして、前記第1モータ(MG1)で出力するべきトルクを計算し、出力を指令するPI制御部(24)と、
前記第1モータ(MG1)のトルクの不足によって、前記エンジン(10)の運転点が前記エンジン目標速度に変更されなかったとき、前記第1モータ(MG1)のトルク不足分をエンジントルク補償部(40)にフィードバックするアンチワインドアップフィードバック部(30)と、
前記第1モータ(MG1)のトルク不足分をエンジントルクに換算するトルク変換計算部(42)と、
換算したエンジントルクを追加し、目標トルクを補償して出力することを指令するエンジントルク補償部(40)と、
を含んで構成されることを特徴とするハイブリッド車両のエンジン運転点追従システム。
【請求項2】
エンジン運転点を決定するために、エンジン目標速度に対応する第1モータ(MG1)の目標速度を算出する段階と、
前記第1モータ(MG1)の目標速度を基に、前記第1モータ(MG1)に対する指令トルクを計算する段階と、
前記第1モータ(MG1)に前記指令トルクを出力するように指令したにもかかわらず、エンジン運転点が前記エンジン目標速度に変更されなかったことを検知する段階と、
エンジン(10)の運転点が前記エンジン目標速度に変更されるようにエンジントルクを補償する段階と、
を含むことを特徴とする、ハイブリッド車両のエンジン運転点追従方法。
【請求項3】
エンジン(10)の運転点とエンジン目標速度の差を検知し、この差を前記第1モータ(MG1)のトルク不足分であるアンチワインドアップタームとすることを特徴とする、請求項2に記載のハイブリッド車両のエンジン運転点追従方法。
【請求項4】
前記エンジントルクを補償する段階は、前記アンチワインドアップタームを検知し、エンジントルク補償部(40)へフィードバックする過程と、前記アンチワインドアップタームをエンジントルクに換算する過程と、前記エンジントルクを追加することによってエンジン目標トルクを補償し、前記エンジン(10)に前記エンジン目標トルクを出力するよう指令する過程と、からなることを特徴とする請求項2に記載のハイブリッド車両のエンジン運転点追従方法。
【図1】


【図2】

【図3】
【図2】
【図3】
【公開番号】特開2012−116453(P2012−116453A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2011−39542(P2011−39542)
【出願日】平成23年2月25日(2011.2.25)
【出願人】(591251636)現代自動車株式会社 (1,064)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成23年2月25日(2011.2.25)
【出願人】(591251636)現代自動車株式会社 (1,064)
【Fターム(参考)】
[ Back to top ]