
Fターム[5H115QN21]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | 速度位置偏差等に対する演算要素 (1,337)
Fターム[5H115QN21]の下位に属するFターム
Fターム[5H115QN21]に分類される特許
1 - 17 / 17
倒立振子型移動体
【課題】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら走行制御が行われる倒立振子型移動体において、搭乗者の意思に基づく操縦モードと、搭乗者の意思に基づかない自動運転モードとを実現することができる倒立振子型移動体を提供する。
【解決手段】搭乗者の意思に基づく走行指令に従ってバランスを保ちながら車体の走行制御が行われる倒立振子型移動体において、制御装置から出力される操作信号に従って搭乗者の重心位置を調節するための重心位置調節手段を備え、制御装置は、搭乗者の意思に基づかないで所定の走行制御を行う自動運転モードへの切り換え指令が生成されたときに、目標となる走行状態が実現される重心位置となるように重心位置調節手段を制御し、重心位置に基づく走行指令に従って車輪駆動手段の制御を行う。
(もっと読む)
車上制御装置

【課題】2重系演算部と2重系速度照査部にクロックを供給する各水晶発振器の故障を検出することできる車上制御装置を提供する。
【解決手段】バス照合同期方式2重系の演算部202と非同期方式2重系の速度照査部203の接続において、演算部202をマスタ、速度照査部203をスレーブとし、両系演算部が各系速度照査部に周期的にかつ交互にアクセスすることで、演算部202と速度照査部203を同期させる方式を採用し、同期に伴い速度照査部より生成される交番信号を、速度照査部にフィードバック取り込みし、速度照査部の周波数照査機能215a,215bを用いて交番信号の周波数上限値と下限値の範囲内であることを確認することで、演算部もしくは速度照査部にクロック供給する水晶発振器のいずれかが異常発振したことを検出する。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】慣性モーメントにより発生するトルク差の影響を排除して、制御則通りの制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】モータ16の回転数をNm、左右輪の回転数差をΔN、モータ16の慣性モーメントをIとし、モータ16の減速比Gを[Nm/ΔN]するとき、回転数差ΔNを微分して求めた回転数差角加速度dΔNに、慣性モーメントI及び減速比Gの二乗であるG2を積算して、トルク差の補正値[2G2・I・dΔN]を求め、複数の制御則1〜Mからトルク差に相当する制御出力を求め、制御出力に補正値を加算して、補正トルク差を求め、求めた補正トルク差となるように、モータ16を制御して、車両の姿勢制御を行う。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
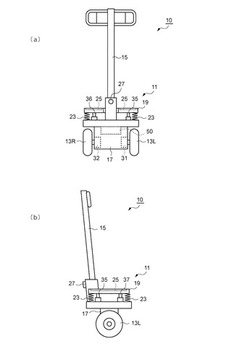
倒立振子型車両
【課題】車両の用途や使用方法に応じて、適切に車両を制御する。
【解決手段】倒立振子型車両1は、折り畳み可能に組付けられたシート15R,15L及びステップ25R,25Lを備える。シート15R,15L及びステップ25R,25Lの折り畳み状態に基づき決定された動作モードを応じて値が変化する特性パラメータKi_x,Ki_y(i=1,2,3)及びθb_x_obj,θb_y_objを用いて車輪体5の制御用操作量が決定される。
(もっと読む)
電気自動車のモータ位置及びクリープ制御装置とその制御方法
【課題】電気自動車のモータ位置及びクリープ制御装置とその制御方法を提供する。
【解決手段】電気自動車のモータ位置及びクリープ制御装置において、車両停止からブレーキ解除後の一定時間までモータ位置制御を維持する時間を決定するモータ位置制御決定部と、モータ位置を維持するためのモータトルクを計算して、モータの位置を維持させるモータ位置制御部と、モータのクリープトルクを時間遅延を通して発生させると同時に、モータ速度を一定にする水準で制御するクリープトルク制御部とを含めて構成されることを特徴とする。
(もっと読む)
電動車両の制御装置
【課題】駆動モータにより駆動する電動車両において、駆動系のねじり振動を抑えつつ、電力供給源から供給される電力の全量を、駆動モータで駆動電力として消費する。
【解決手段】駆動輪18に伝達する駆動トルクを発生する駆動モータ15と、少なくとも発電機12を有し駆動モータ15へ電力供給する電力供給源12,17を有し、車両走行状態に基づいて必要駆動トルクを算出する必要駆動トルク算出手段20と、当該必要駆動トルクに基づいて電力供給源12,17が駆動モータ15に供給する供給電力を算出する供給電力算出手段20と、必要駆動トルクから駆動系のねじり振動と同等の周波数成分を低減した駆動トルクを出力するように駆動モータ15を制御する駆動トルク指令手段20と、供給電力から駆動系のねじり振動と同等の周波数成分を低減した電力を駆動モータ15に供給するように電力供給源12,17を制御する供給電力指令手段20とを備える。
(もっと読む)
走行制御装置、および該装置を備えたフォークリフト
【課題】走行抵抗に影響を及ぼす要素毎に、個別的に走行速度を一定に保つ制御を行うことができる走行制御装置、および該装置を備えたフォークリフトを提供する。
【解決手段】本発明に係る走行制御装置は、モータの回転を走行輪に伝達するためのギヤを収容したギヤケースと、ギヤケースの内部または外表面の温度を検出し、該温度に応じた温度信号を出力する温度センサと、温度信号に応じて、走行抵抗係数の補正を行う補正部と、補正後の走行抵抗係数および速度指令手段の操作量に基づいて、車両の速度とトルク指令値とを関係付ける最大トルク曲線(C0)をシフトさせ、該シフト後のトルク曲線(CL、CH)に基づいて、車両の速度(例えば、V2)に対応したトルク指令値(例えば、T2L、T2H)を求め、該トルク指令値を前記モータに出力するトルク指令部を備えている。
(もっと読む)
四輪駆動式産業用車両
【課題】前側及び後側の車輪に空転が発生した場合でも、走行し得る四輪駆動式産業用車両を提供する。
【解決手段】前部車軸及び後部車軸の途中にディファレンシャアル装置が配置されると共に、両ディファレンシャアル装置同士が連結軸により連結され、各車軸の先端部に車輪を駆動するモータがそれぞれ設けられたホイールローダであって、各モータ41を制御する制御装置44を、エンコーダ45により検出された回転速度に基づき前側及び後側における左右の車輪同士の回転速度比を演算する速度比演算部46と、この速度比演算部にて求められた回転速度比及び予め求められた内外輪の回転半径比に基づき前側及び後側における左右の車輪のいずれかが空転しているか否かを判断する空転判断部47と、この空転判断部にて空転していると判断された場合に、空転している車輪のモータ41のトルクを低下させるトルク指令を出力するトルク指示部48とから構成したもの。
(もっと読む)
電動機制御装置および車両
【課題】三相交流電動機をより適正に制御する。
【解決手段】モータの回転数Nmが急変していないときには電流センサによって検出される相電流Iu,Ivを座標変換したd軸,q軸の電流Id,Iqに時定数Tを値T1とするなまし処理を施して制御用電流fId,fIqを演算し(S170,S190)、モータの回転数Nmが急変しているときにはd軸,q軸の電流Id,Iqに時定数Tを値T1より小さい値T2とするなまし処理を施して制御用電流fId,fIqを演算し(S180,S190)、演算した制御用電流fId,fIqに基づくフィードバック制御を施してモータを駆動制御する(S200〜S260)。これにより、電流センサによって検出される相電流Iu,Ivに含まれる高調波成分の影響を低減させてフィードバック制御を行なうことができると共にモータの回転数Nmが急変しているときにも応答性を確保してモータを駆動制御することができる。
(もっと読む)
ナビゲーションシステムおよびそれを備えたハイブリッド車両
【課題】排ガス出力車両を課金対象とするロードプライシングエリアの走行に関して、ハイブリッド車両に適切な経路案内を実行する。
【解決手段】ECUは、排ガス出力車両を課金対象とするロードプライシングエリアの通過が予測されると(S100のYES判定時)、蓄電装置の現在のSOCを取得する(S110)とともに、EV走行によってロードプライシングエリアを通過するために必要なエネルギ量を推定する(S120)。さらに、現在のSOCと、推定した必要エネルギ量とに基づいて、EV走行によってロードプライシングエリアの通過が可能か否かが判定される(S130)。ECUは、EV走行によるロードプライシングエリアの通過が不能と判定したとき(S130のNO判定時)には、付近の充電スタンドへの経路案内処理(S145〜S180)および/または迂回経路案内処理(S190〜S220)を実行する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータトルクを正確に算出することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、モータジェネレータと、モータジェネレータにより回転制御される第1の要素と、第1の要素と係合する第2の要素と、を有するハイブリッド車両に適用され、所定のトルクをモータジェネレータに出力させることにより、第1の要素と第2の要素の回転位相を同期させる制御手段を有する。制御手段は、エンジン及びモータジェネレータの慣性質量と、モータジェネレータの回転数と、に基づいて、モータジェネレータのモータ軸のイナーシャトルクを算出し、所定のトルクをイナーシャトルクで補正してからモータジェネレータに出力させる。このようにすることで、前記第1の要素を目標回転数に正確に収束させることが可能なモータトルクを算出することができ、オーバーシュートの発生を防ぐことができる。
(もっと読む)
ハイブリッド車両または電気車両の電動機の制御方法
本発明は、電気車両またはハイブリッド車両の電動機の制御方法に関する。本方法は、車両の伝動軸を駆動する電動機の操作を目的とし、その電動機は、その電動機に与えられるトルク指令値に相当する値をもつトルクを伝動軸に加える。トルク指令値は、車両のドライブトレインの振動の固有モードの周波数を含む周波数帯域で、帯域濾過型の処理を伝動軸の瞬間回転速度を表す信号に適用することで得られる、補正信号を減算することによって補正される。本発明は、伝動軸に加えられるトルクの不連続性によって生じる、ぎくしゃくした動きの低減に適用される。  (もっと読む)
(もっと読む)
ハイブリッド車両のモータ回転制御装置
【課題】ハイブリッド車両のモータ回転制御を、クラッチのスリップ状態からの、若しくは、スリップ状態への切り替え時も、高応答で行わせ得るようにする。
【解決手段】目標モータ回転数tNmをモデルマッチング項MM2に通過させてモデルマッチング後の目標モータ回転数tNmから、実モータ回転数Nmを差し引いてモータ回転偏差を求め、この偏差をモデルマッチング項MM1に通過させて、モータ回転偏差をなくすモータトルク補正量ΔTmを求める。位相補償器INVは、モータ回転数Nm対応のモータトルクを求め、ローパスフィルタLPFは、制御対象へのモータトルク補正量ΔTm’に対しフィルタ処理を施し、両者間のモータトルク偏差を求め、この偏差だけ、モデルマッチング項MM1からのモータトルク補正量ΔTmを差し引いて、制御対象へのモータトルク補正量ΔTm’となす。ΔTm’に、入力変数X=第2クラッチスリップ時伝達トルクTcslipおよびフリクションFを足し込んで制御対象に向かわせ、この時、LPFおよびINVよりなる外乱オブザーバを初期化する。
(もっと読む)
車両用駆動制御装置
【課題】発電機と交流モータとの組み合わせで、安定したモータトルク制御を行うことができる車両用駆動制御装置を提供する。
【解決手段】従駆動輪の要求駆動力に基づいてモータ4のトルク指令値Ttを算出し、このトルク指令値Ttを効率良く発生することができる動作点で発電機7を制御する。また、前記トルク指令値Ttに時間遅延を与えることでトルク指令値Tmを算出し、このトルク指令値Tmに基づいてモータ4を制御する。
(もっと読む)
車両用ブレーキシステム
【課題】圧力センサの故障に対応でき、圧力センサを用いずにスライディングモード制御を行い得る車両用ブレーキシステムをもたらすことにある。
【解決手段】目標車輪速度と車輪速度との誤差および、目標車輪速度に対する車輪速度の誤差積分値の検出値に基づきスライディングモード制御を行う制御手段9を具え、前記制御手段によって車両の車輪の滑走を制御する車両用ブレーキシステムにおいて、前記車両用ブレーキシステムは、前記目標車輪速度と車輪速度との誤差および誤差積分値の検出値からブレーキシリンダ圧力を推定するロバストVSSオブザーバ10を具え、前記制御手段9は、前記目標車輪速度と車輪速度との誤差および誤差積分値の検出値と、前記ロバストVSSオブザーバ10が求めたブレーキシリンダ圧力の推定値とに基づく全状態フィードバックにより前記スライディングモード制御を行うことを特徴とする、車両用ブレーキシステムである。
(もっと読む)
駆動系の制振制御装置
【課題】モータ/ジェネッレータから負荷に駆動力を伝達する駆動系において、駆動系の振動を防止する。
【解決手段】ベクトルアクチュエータ43でセットした変速用トルクおよび駆動力用トルクを、変速成分用フィルタ44および駆動力成分用フィルタ45に通し、モータ/ジェネッレータへの最終的なアクチュエータトルク指令とする。
(もっと読む)
1 - 17 / 17
[ Back to top ]