
Fターム[5H115RE12]の内容
車両の電気的な推進・制動 (204,712) | ハイブリット車用エンジンの制御 (4,806) | エンジンの特性曲線を考慮するもの (645) | 最適動力曲線を考慮するもの (134)
Fターム[5H115RE12]に分類される特許
1 - 20 / 134
ハイブリッド車両の制御装置
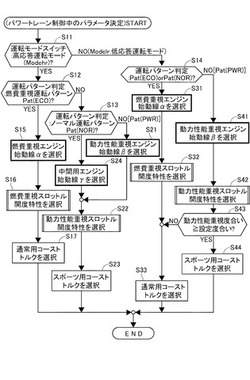
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
ハイブリッド自動車

【課題】加速要求に迅速に対応する。
【解決手段】高電圧系の電圧VHが要求トルクTr*が閾値Tref以上であるときより低い昇圧上限値Vlim(電圧Vlo)の範囲内で要求トルクTr*に基づいて設定される電圧指令VH*になるよう昇圧回路55を制御している最中に要求トルクTr*が閾値Tref以上になったときには(ステップS170)、高電圧系の電圧VHが昇圧上限値Vlim(電圧Vhi)の範囲内で要求トルクTr*に基づいて設定される電圧指令VH*になるよう昇圧回路55を制御する(ステップS200,S230)と共にエンジン22を応答性よく運転しながら要求トルクTr*に基づくトルクにより走行するようエンジン22やモータMG1,MG2を制御する(ステップS220,S240)ことにより、加速要求により迅速に対応することができる。
(もっと読む)
自動車
【課題】昇圧コンバータの環境温度が低いときに、運転者の加速要求により対応できるようにする。
【解決手段】昇圧コンバータの環境温度Tenが所定温度Ten1未満でパワーモード信号PSWがオンのときには(S130,S160)、環境温度起因上限電圧VHlimtmp以下の範囲内で上昇と下降とを繰り返す電圧指令VH*を用いて昇圧コンバータ55を制御する昇温制御を実行し(S170,S180,S200)、昇圧コンバータ55の昇温の完了後は(S150)、環境温度起因上限電圧VHlimtmpより高い所定電圧VH1以下の範囲内で設定した電圧指令VH*を用いて昇圧コンバータ55を制御する(S190,S200)。
(もっと読む)
ハイブリッド車両のエンジン運転点追従システム及び方法
【課題】第1モータに対する速度制御の性能が低下した状態で、エンジン運転点追従性能を向上できるようにしたハイブリッド車両のエンジン運転点追従システム。
【解決手段】エンジンと、2個のモータと、2組の遊星ギアセットと、を含むハイブリッド車両のエンジン運転点追従システムであって、エンジン目標速度を第1モータの目標速度に変換するエンジン目標速度変化部と、第1モータの目標速度をトルク値に換算するPI制御部と、第1モータのトルク不足分をエンジントルク補償部にフィードバックするアンチワインドアップフィードバック部と、第1モータのトルク不足分をエンジントルク値に変換するトルク変換計算部と、換算されたエンジントルクを追加してエンジン目標トルクを補償し、エンジン運転点をエンジン目標速度に追従させるエンジントルク補償部と、を含んで構成されるハイブリッド車両のエンジン運転点追従システムを提供する。
(もっと読む)
ハイブリッド自動車
【課題】駆動軸の回転数に急変が生じるものとしても、二次電池が過大な電力により充放電するのを抑制する。
【解決手段】低μ路の路面上を走行するなどアクセルペダルの踏み込みにより駆動輪にスリップが生じその後アクセルペダルの踏み込みを維持しながらブレーキペダルの踏み込みによりスリップしている駆動輪をグリップさせた両踏みグリップ状態を判定し、両踏みグリップ状態でないときには要求パワーPeをエンジンから効率良く出力するための目標運転ポイントでエンジンを運転すると共に要求トルクを駆動軸に出力するために設定されたモータMG1のトルク指令Tm1*を実行トルクT1*に設定してモータMG1を駆動制御し、両踏みグリップ状態であるときには実行トルクT1*に値0を設定することによりモータMG1のトルクを制限する。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の抑制と内燃機関の運転効率の低下の抑制との両立を図る。
【解決手段】効率優先運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御すると第2モータから出力されるトルクが異音トルク範囲内となるときには(S170)、異音抑制動作ラインと要求パワーPe*とを用いて得られる第1仮運転ポイントと(S180)、第2モータから出力されるトルクが異音トルク範囲の上限よりも大きくなると共に要求パワーPe*がエンジンから出力されるよう設定される第2仮運転ポイントと(S190)、のうち回転数が小さい方の運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S200〜S270)。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の温度が低いときにその蓄電割合が過剰に高くなるのを抑制する。
【解決手段】電池温度Tbが所定温度未満のときに、電池温度Tbが所定温度以上のときに比してモータからの動力だけを用いて走行する電動走行が行なわれにくくなると共にエンジンからの動力とモータからの動力とを用いて走行するハイブリッド走行が行なわれやすくなるものにおいて、バッテリの蓄電割合SOCに応じて蓄電割合調整用パワーPbsocを設定し(S300)、電池温度Tbが所定温度未満のときに所定温度以上のときに比して小さな値を嵩上げパワーPbηに設定し(S310)、これらの和をバッテリの充放電用パワーPb*に設定する(S320)。そして、ハイブリッド走行によって走行するときには、充放電用パワーPb*を走行用パワーに加えたパワーがエンジンから出力されながら走行するようエンジンと二つのモータとを制御する。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関の始動後に吸気温を検出する吸気温検出センサと冷却水温を検出する冷却水温検出センサとの異常診断を行なうものにおいて、この異常診断をより適正に行なう。
【解決手段】エンジンを運転停止してモータからの動力だけで走行可能で、エンジンを始動した後(エンジンの運転中)に吸気温センサからの吸気温Tinと水温センサからの冷却水温Twとの比較によって両センサの異常診断を行なうものにおいて、イグニッションオンされてからエンジンの始動条件が初めて成立するまではエアフローメータの熱線への通電を行なわず(S220〜S240)、エンジンの始動条件が初めて成立したときに熱線への通電を開始する(S250)。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前輪と後輪とを別々のモータで駆動する構成においてモータの発熱を的確に抑制しつつて走行安定性を確保する上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】フロントモータ18、リアモータ20のうち、一方のモータに分配される駆動トルクTrq1が一方のモータの基準トルクを超過したと判定された場合、他方のモータで駆動される車輪にスリップの発生が否と判定されたときに、一方のモータに分配される駆動トルクTrq1を基準トルクより低減させると共に他方のモータに分配される駆動トルクTrq2を増大させて要求トルクを満足させる。他方のモータで駆動される車輪でのスリップの発生が有と判定され、かつ、エンジンにより駆動される車輪と一方のモータにより駆動される車輪とが同じ車輪である際に、駆動トルクTrq2の増大を禁止して、エンジンに分配される駆動トルクを増大させて要求トルクを満足させる。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】演算に必要な構成の簡略化が可能なハイブリッド車両の制御装置を提供すること。
【解決手段】アクセル開度と自動変速機3の入力回転毎に設定されたエンジン用の目標定常トルクマップとモータジェネレータ用のアシストトルクマップとを備え、これら2つのトルクマップの合計を車両の目標駆動トルクとする演算を行う統合コントローラ20を備えたハイブリッド車両の制御装置であって、統合コントローラ20は、エンジン効率とモータ効率を合わせたシステム効率が最適となるトルクを基準として設定した最適発電トルクマップとアシストトルクマップとを1つのマップとしたアシスト・発電統合トルクマップを備え、このアシスト・発電統合トルクマップを用いてアシストトルクおよび発電トルクを演算するとともに、アシストトルクを演算する場合は0トルクで下限制限し、前記発電トルクを演算するときは0トルクを上限制限するようにした。
(もっと読む)
車両用制御装置
【課題】摩擦締結要素を保護するための保護制御が行われ易い状態にあることを、ドライバに対して、適切に告知することのできる車両用制御装置を提供すること。
【解決手段】動力源10,20と駆動輪54との間に介装され、前記動力源と前記駆動輪とを断接する摩擦締結要素25を備える車両に対して制御信号を出力する車両用制御装置であって、前記摩擦締結要素の温度を検出する温度検出手段64と、前記摩擦締結要素の締結トルクを制御する締結トルク制御手段と、前記摩擦締結要素の温度が所定の第1温度以上である場合に、前記締結トルク制御手段を制御し、前記摩擦締結要素の前記締結トルクを、所定の周期で繰り返し変化させるトルク振動制御を行うトルク振動制御手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
車両の制動制御装置
【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
車両用駆動制御装置
【課題】車両の急減速時に同期が不完全なまま噛合クラッチを接続することにより、異音が発生したり噛合クラッチが損傷したり或いは駆動力変動が生じたりすることを防止する。
【解決手段】噛合クラッチ42が遮断されたエンジン走行手段72による車両走行時に車速Vが低下し、駆動力源切換マップPmap に従って定められた接続車速以下になった場合でも、車両の減速度が所定値以上の急減速時には、ステップR3の噛合クラッチ接続制御の実行が阻止されて噛合クラッチ42が遮断状態に維持される。これにより、車両の急減速時に同期が不完全なまま噛合クラッチ切換アクチュエータ48により噛合クラッチ42を接続しようとして、異音が発生したり噛合クラッチ42が損傷したり或いは駆動力変動が生じたりすることが防止される。
(もっと読む)
車両駆動装置のための制御装置
【課題】内燃機関、摩擦係合装置、回転電機の順に設けられた車両駆動装置において、摩擦係合装置のスリップ制御時にトルク増幅制御も可能とする。
【解決手段】摩擦係合装置12の伝達トルク容量を決定するトルク容量決定部と、摩擦係合装置の入出力速度比に基づいて、1以上の値となるトルク増幅率を導出するトルク増幅率導出部と、トルク容量決定部により決定された伝達トルク容量と、増幅率導出部により速度比に基づいて決定されたトルク増幅率とを用い、伝達トルク容量にトルク増幅率を乗算した値から伝達トルク容量を減算した値に基づいて、回転電機の出力トルクの指令値を決定するトルク指令値決定部とが備えられる。
(もっと読む)
ハイブリッド車
【課題】内燃機関の浄化触媒を暖機する際に、運転者の加速要求により適正に対応する。
【解決手段】浄化触媒の暖機要求がなされたときにおいて、差分パワーΔPrが判定用パワーC1を超えているときには(ステップS170)、要求パワーPr*と冷却水温Twと差分パワーΔPrが判定用パワーC1以下であるときに用いられる第1補正係数設定用マップより補正係数Tarpeを大きくなる傾向に設定する第2補正係数設定用マップとを用いて補正係数Tarpeを設定し(ステップS190)、基本開度Tatrqに補正係数Tarpeを乗じたものを目標スロットル開度TH*に設定し(ステップS200)、エンジンのスロットルバルブの開度を目標スロットル開度にした状態でエンジンを運転しながら要求パワーPr*に基づくパワーにより走行するようエンジンと2つのモータとを制御する(ステップS210〜S250)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】登坂シーンで車両がずり下がる際、バッテリの過充電を防止しつつ、回生による車両のずり下がりを抑制すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン3と、発電機5,6と、バッテリ8と、駆動機10,11と、ダイレクト配電制御手段(図2)と、車両ずり下がり対応制御手段(図7)と、を備える。ダイレクト配電制御手段(図2)は、発電機5,6が発電した実発電電力を過不足なく駆動機10,11の駆動電力として消費するように、駆動要求に応じて発電電力を制御する。車両ずり下がり対応制御手段(図7)は、ダイレクト配電による発電制御中、駆動トルク指令値の符号が反転せずに駆動回転数の符号が反転したとき、駆動機10,11を回生させる制御を行うとともに、発電機5,6を力行させる制御を行う。
(もっと読む)
車両用動力伝達装置用制御装置
【課題】差動機構を高回転化から保護しつつエンジントルク低下を補うことが可能な車両用動力伝達装置用制御装置を提供する。
【解決手段】許容回転速度設定手段96は、所定の加速操作量OPAC及びエンジン回転速度Neのときにエンジン14から出力されるエンジントルクTeが、エンジン14の出力トルク特性を示す予め設定された関係から上記所定の加速操作量OPAC及びエンジン回転速度Neに基づいて定まる基準エンジントルクTesよりも低いと判断された場合には、そうでない場合と比較して、差動機構である第1遊星歯車装置20の許容入力回転速度N1inを高く設定する。従って、許容入力回転速度N1inの制限によって第1遊星歯車装置20を高回転化から保護することが可能であると共に、許容入力回転速度N1inの変更に応じてエンジン回転速度Neを引き上げてエンジントルクTeを上昇させエンジントルク低下を補うことが可能となる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】変速部の入力軸に連結された動力源部を備える車両用動力伝達装置において、動力源部から付与される変速部の入力軸トルクにより実行される回転同期制御を伴うコーストダウンシフト時の変速ショックを抑制する。
【解決手段】自動変速部20のコーストダウンシフトに際して、入力軸回転速度NATの回転同期制御を実行するときのAT入力軸トルクTATの変化率が、コーストダウンシフトに関与する解放側係合装置の差回転速度ΔNcが比較的小さな領域では大きな領域と比較して、相対的に抑制されるので、コーストダウンシフトに関与する解放側係合装置の引き摺りトルクに因って自動変速部20の出力軸22に伝達されるAT入力軸トルクTATを起因とする出力軸トルク変動を抑制することが可能となる為、AT入力軸トルクTATにより実行される回転同期制御を伴うコーストダウンシフト時の変速ショックを抑制することができる。
(もっと読む)
1 - 20 / 134
[ Back to top ]