
Fターム[5H115TO23]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | ブレーキ操作量 (1,884)
Fターム[5H115TO23]の下位に属するFターム
ブレーキ操作の変化量 (287)
Fターム[5H115TO23]に分類される特許
141 - 160 / 1,597
車両の制動制御装置
【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
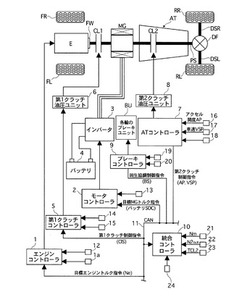
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】運転者の加速意図が相対的に弱い場合に必要な加速がエンジン始動線に近くても、EVモードを継続する頻度を増やし得るハイブリッド車の制御装置を提供する。
【解決手段】運転者の加速意図が相対的に弱い場合に、実アクセル開度に対して1:1未満となる制御用アクセル開度を設定した遅開き特性γを参照して、実アクセル開度を制御用アクセル開度に変換する手段と、この変換された制御用アクセル開度がエンジン始動線を超える前には第1運転モードを、この変換された制御用アクセル開度がエンジン始動線を越えると第2運転モードを選択する手段とを備え、遅開き特性γの実アクセル開度に対する制御用アクセル開度の増加率である開度増加率をエンジン始動線手前の領域と当該領域になる前の領域とで異ならせ、当該領域になる前の領域での開度増加率よりエンジン始動線手前の領域での開度増加率を低下させる。
(もっと読む)
モータトルク制御装置
【課題】走行状況に応じた適切な運転性能を得ることが可能なモータ出力(トルク)制限を実現することができるモータトルク制御装置を提供する。
【解決手段】車速とブレーキ油圧(ブレーキペダル踏込み量)に応じて、モータに対する指令トルクの上限値であるモータ制限トルクを可変させる。また、ブレーキ油圧が大きくなるしたがって、モータ制限トルクを減少させる。また、車速が大きくなるにしたがって、モータ制限トルクの減少を開始する時点のブレーキ油圧が小さくなるようにする。また、ブレーキ油圧が所定値以上のとき、モータ制限トルクをマイナス又は0とする。また、ブレーキ油圧が大きくなるしたがって、モータ制限トルクのマイナスの値が大きくなるようにする。また、車速が大きくなるにしたがって、モータ制限トルクのマイナス側の最大値が大きくなるようにする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エネルギー効率を高めつつ、共振による振動を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】第1回転電機は、エンジンとの間で動力伝達が行われ、エンジンの動力に基づき発電する。第2回転電機は、車両の駆動軸と連結し、当該駆動軸の動力に基づき回生制動を行う。蓄電手段は、例えばバッテリであり、第1回転電機及び第2回転電機に電力を供給すると共に、第1回転電機及び第2回転電機の回生電力により充電を行う。制御手段は、第2回転電機の回生制動時に、当該回生電力のうち蓄電手段により充電できない電力に基づき、第1回転電機によりエンジン回転数を上昇させるエンジン強制回転制御を行う。このとき、制御手段は、上述の充電できない電力が、エンジン強制回転制御を実行したときにエンジン回転数が共振回転数より大きくなる電力である場合に、エンジン強制回転制御を行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
ハイブリッド車両に搭載された二次電池の管理方法
【課題】ハイブリッド車両の二次電池の端子電圧が、使用可能な範囲の下限値以下とならないように管理する。
【解決手段】二次電池の放電が長時間連続するほど増加し、かつ放電しなくなってから時間が経過するほど減少する電流積算値Sを算出する。この電流積算値Sに基づき、内燃機関の始動判定を行う始動判定電圧Vrefを補正する。電流積算値Sが大きいほど、開始判定電圧Vrefが増加するようにする。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジン1による駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
電動車両の制御装置
【課題】変速ショックの抑制と同時に、イナーシャフェーズ中のブレーキのレスポンス向上を図った電動車両の制御装置を提供する。
【解決手段】モータを有する駆動源の下流位置に配設され、摩擦締結要素の掛け替えにより複数の変速段を達成する自動変速機と、前記自動変速機の掛け替えを行う一方、前記モータを発電機として車両にブレーキを掛ける回生ブレーキ、及び機械制動力を利用して車両にブレーキを掛けるメカブレーキを併用する回生協調ブレーキ制御を行う変速制御手段とを備えた電動車両の制御装置であって、前記変速制御手段は、イナーシャフェーズ中にブレーキペダルが更に踏み込まれた場合、その踏み込みによるブレーキ力の増加分を前記メカブレーキで補償する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】自動変速機の入力軸に動力伝達可能に連結された電動機を備える車両用動力伝達装置において、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフトの際にガタ打ちに伴うショックを抑制する。
【解決手段】車両10が被駆動状態であるときに変速機入力トルクTATを零に向かって制御する際にその変速機入力トルクTATが零に近づくに伴って、車両状態に基づいて変速機入力トルク変化率が抑制されるので、ガタ打ちに伴う振動が抑制される。また、そのガタ打ちを起振源とするガタ打ち後の振動も抑制される。よって、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフト時において、ガタ打ちに伴うショック(すなわちガタ打ちショックやガタ打ち後の振動的なショック)や歯打ち音が抑制される。
(もっと読む)
車両駆動力制御装置
【課題】ブレーキ力発生異常があった場合、クリープトルクを低減して、車両の押出し感を解消する車両駆動力制御装置を提供する。
【解決手段】ブレーキ力発生異常を監視し(S1)、ブレーキ力発生異常がある場合(S2)、ブレーキストロークセンサのストローク量の増加に応じて、クリープトルクの低減量を増加する(S3)。
(もっと読む)
電動車両の制御装置
【課題】回生制御中において変速制御中または変速制御終了時にブレーキ踏み込み操作があっても、スリップ締結に伴う変速ショックの発生を防止することができる電動車両の制御装置を提供する。
【解決手段】統合コントローラは、モータ/ジェネレータの回生制御中において自動変速機が変速制御中であるか否かを判断する(ステップSA1)。ステップSA1の判断結果がYESの場合にはブレーキ踏力が増加しているか否か、つまり、ブレーキ踏み込み操作があるか否かを判断する(ステップSA2)。ステップSA2の判断結果がYES、つまり、ブレーキ踏み込み操作があると判断した場合には、モータ/ジェネレータの回生トルクの増加を制限してブレーキ制動を行う(ステップSA3)。具体的には、各輪のブレーキユニット(メカブレーキ)を駆動して、各輪の機械制動を行う。
(もっと読む)
ハイブリッド車両の制御装置自動車の発電制御
【課題】強制発電モードでありかつ減速コースト運転中である場合において特定の条件ではエンジンをフュエルカットすることとして燃費を向上させる。
【解決手段】強制発電モードでありかつ減速コースト運転中であると判定された場合に、エンジンをフュエルカットしたときバッテリから放電されるフュエルカット時バッテリ放電条件であるのか、それともエンジンをフュエルカットしたときバッテリに充電されるフュエルカット時バッテリ充電条件であるのかを判定し(S3)と、この判定結果よりフュエルカット時バッテリ放電条件であると判定された場合に作動状態のエンジンでモータジェネレータを連れ回しての発電を行わせ(S7、S8)、フュエルカット時バッテリ充電条件であると判定された場合にエンジンをフュエルカットする(S5、S6)。
(もっと読む)
車両用エンジン始動制御装置
【課題】エンジン始動要求から所定時間でエンジン始動を完了させるために過不足のない最適なエンジン始動トルクを、エンジン始動開始直前におけるエンジンの回転停止位置毎のばらつきを考慮して最適に設定することができる車両用エンジン始動制御装置を提供する。
【解決手段】電動機走行中のエンジン始動時に電動機12から出力されるエンジン始動トルクTSを、そのエンジン始動トルクTSがエンジン14を始動させるための必要最小限の値となるように、エンジン始動開始直前におけるエンジン回転停止位置PBTDCに基づいて算出され、電動機走行中においては電動機12がエンジン始動トルクTS分の余力を残した状態で作動するように、電動機12の回転速度NMGに応じて出力トルク範囲が定められた電動機走行作動領域Aが設定される。
(もっと読む)
ハイブリッド自動車
【課題】電動機の温度に基づいて当該電動機のトルク制限をより適正に実行する。
【解決手段】エンジン22の冷却水温Tswが所定温度Tref以上である状態で車両走行が可能となった以降、およびエンジン22の冷却水の冷却水温Tswが所定温度Tref未満である状態でシステムメインリレーSMRがオンされた以降には、なまし処理済温度Tnにレートリミット処理を施したレートリミット処理済温度Trlが制御用温度Tc1,Tc2として設定され(ステップS140〜S190)、制御用温度Tc1,Tc2が高いほど小さくなる傾向に設定されるモータMG1およびMG2のトルク制限値Tm1lim,Tm2limを用いてモータMG1およびMG2のトルク出力が制限される。
(もっと読む)
車両の制御装置および制御方法
【課題】駆動力を得るための電力を蓄える高圧電源を外部電源の電力で充電する外部充電が可能な車両において、補機負荷の作動を確保しつつ補機バッテリの過放電を防止する。
【解決手段】ECUは、高圧電源と、外部充電を行なうための充電装置と、低圧電源(補機バッテリ)と、補機負荷と、高圧電源の電圧を降圧して補機負荷に出力するDC/DCコンバータとを備える車両を制御する。ECUには、外部充電が可能な場合にCPLT信号が入力され、ユーザが補機負荷を作動させている可能性がある場合にIG信号が入力される。ECUは、CPLT信号が「ON」であると(S1にてYES)、外部充電を実行し(S6)、高圧電源が満充電状態となった場合(S5にてYES)、IG信号が「ON」であると(S7にてYES)、外部充電を一時的に停止させ(S8)、DC/DCコンバータの作動を継続させる(S9)。
(もっと読む)
ハイブリッド自動車
【課題】少なくとも一つの電動機を有する電動機装置が接続された駆動電圧系の電圧を昇圧コンバータによって状況に応じてより適正に変化させる。
【解決手段】モータ運転モードで走行している最中にエンジンの始動要求がなされた走行中始動要求時でないときには比較的小さな所定値ΔV1を昇圧レートΔVに設定し(S130)、走行中始動要求時には所定値ΔV1より大きな所定値ΔV2や所定値ΔV3を昇圧レートΔVに設定し(S160,S170)、設定した昇圧レートΔVで高電圧系電力ラインの電圧VHが目標電圧VHtagに向けて上昇するよう昇圧コンバータを制御する(S180,S190)。これにより、走行中始動要求時には、高電圧系電力ラインの電圧VHを迅速に変化させることができ、走行中始動要求時でないときには、モータの制御性を確保しながら高電圧系電力ラインの電圧VHを変化させることができる。
(もっと読む)
ハイブリッド自動車および情報出力方法
【課題】シフトポジションがニュートラルポジションで二次電池に蓄えられている蓄電量の全容量に対する割合である蓄電割合が低いときに、運転者を困惑させないようにその旨を報知する。
【解決手段】シフトポジションがNポジションでバッテリの蓄電割合SOCが閾値Sref未満のときにおいて(S110)、車速Vが閾値Vref以下のときにはディスプレイに蓄電割合情報を点滅表示すると共にシフト変更要求情報を表示し更にスピーカから警告音を出力し(S130,S140)、車速Vが閾値Vrefより高いときには蓄電割合情報をディスプレイに点滅表示すると共にスピーカから警告音を出力する(S130,S150)。
(もっと読む)
ハイブリッド車の制御装置
【課題】アクセル開度に対応する駆動力制御を適切に実行することのできるハイブリッド車の制御装置を提供する。
【解決手段】内燃機関および電動機を駆動力源として備え、アクセル開度に応じて設定される要求駆動力に基づいて前記駆動力源の出力を制御するハイブリッド車の制御装置において、前記内燃機関により現在出力可能な出力の上限として内燃機関上限出力を求める内燃機関出力算出手段(ブロックB1)と、前記電動機により現在出力可能な出力の上限として電動機上限出力を求める電動機出力算出手段(ブロックB2)と、前記内燃機関上限出力と前記電動機上限出力とから算出される前記駆動力源全体として現在出力可能な出力の上限である駆動力源上限出力が、前記アクセル開度が全開の場合に出力されるように前記要求駆動力を設定する要求駆動力設定手段(ブロックB4〜B6)とを設けた。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
ハイブリッド自動車
【課題】発電機の温度上昇時に、発電機の上限回転数をより適正に設定する。
【解決手段】モータの温度が所定温度以上のときには、大気圧Paと吸気温度Taとに基づいてエンジンから出力可能な最大トルク(機関最大トルク)Temaxを設定し(S110)、設定した機関最大トルクTemaxがエンジンから出力されるときにそれをモータによって受け止めるためにモータから出力すべきトルク(最大対応トルク)Tm1minを設定し(S120)、設定した最大対応トルクTm1minでモータを駆動するときでもモータの動作点が減磁領域外となる範囲でモータの仮上限回転数Nm1maxtmpを設定し(S130)、設定した仮上限回転数Nm1maxtmpと所定回転数Nm1setとのうち大きい方をモータの上限回転数Nm1maxに設定する(S140)。そして、モータが上限回転数Nm1max以下の回転数で回転するよう制御する。
(もっと読む)
141 - 160 / 1,597
[ Back to top ]