
Fターム[5H115TU10]の内容
車両の電気的な推進・制動 (204,712) | 監視対象、保護 (4,789) | 加速度、減速度 (46)
Fターム[5H115TU10]に分類される特許
1 - 20 / 46
電動車の走行制御装置、および電動車
【課題】離席時制御による安全性向上を図りつつ、誤って離席が検知された場合に確実に車両を停止させることができる走行制御装置および電動車を提供する。
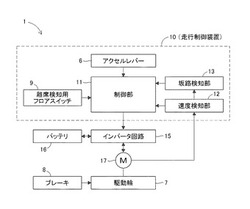
【解決手段】本発明に係る走行制御装置10は、目標速度を指令するための速度指令手段6と、車両速度を検知する速度検知部12と、車両速度が目標速度に一致するように走行用モータ17を制御する制御部11とを備えた走行制御装置において、オペレータが離席しているか否かを検知する離席検知部9と、走行路が坂路であるか否かを検知する坂路検知部13とをさらに備え、制御部11は、オペレータが離席していること、および走行路が坂路であることが検知された場合は目標速度をゼロとし、オペレータが離席していること、および走行路が坂路ではないことが検知された場合は目標速度を予め定められた微小速度として走行用モータ17を制御する。
(もっと読む)
鉄道車両用異常診断システム

【課題】鉄道車両に取り付けられたセンサユニットからの検出信号に基づいて脱線、転覆、衝突等の重大事故の異常を判定する異常判定装置に、定期検査で行われるような車両や軌道の異常を検知し処理する機能を付加した鉄道車両用異常診断システムを提供する。
【解決手段】先頭車両25及び最後尾車両26に加えて、中間車両27にも、6軸センサ50を備え、その測定値を車輪回転速度やGPS信号とともにMPU53で演算し、異常診断をする。脱線、転覆、衝突に至らなくても、定期検査で保守点検員の目視による調査や専用の異常診断装置によって行われていた車輪のフラット或いは車軸や軸受についての異常診断、乗り心地評価、或いは軌道の検査を、通常の営業車両で実行できるようになるため、人件費や設備投資の削減ができる。また、検査の頻度を格段に増やしてタイムリーに車両劣化診断を行うことができ、一層の安全向上を図ることができる。
(もっと読む)
走行制御装置および該装置を備えたフォークリフト
【課題】走行抵抗に影響されることなく加速度を一定に保つことができ、さらに、登坂時において、走行速度を制御することができる走行制御装置を提供する。
【解決手段】アクセル操作および前後進切り替え操作に応じて決定された目標速度で走行させる走行制御装置10であって、走行速度と目標速度との偏差から第1トルク指令値を算出する第1トルク指令値算出手段11と、車両の加速度と正の加速度制限値との偏差から第2トルク指令値を算出する第2トルク指令値算出手段12と、車両の加速度と負の加速度制限値との偏差から第3トルク指令値を算出する第3トルク指令値算出手段13と、第1〜3トルク指令値を比較してトルク指令値を決定するトルク指令値決定手段14と、を備えたことを特徴とする。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】急な加減速を抑制して芝の損傷を防止することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17、前進アクセルペダル18、及びブレーキペダル19)の操作量に応じた走行用の駆動力を発生するモータ41と、車両の速度を検出する速度センサ36と、速度センサ36の検出結果とペダルの操作量とに基づいて目標とすべき車両の加減速度を算出する加減速度算出部38aと、速度センサ36の検出結果に応じて車両の加減速度の上限値及び下限値の少なくとも一方を設定する制限値設定部38bと、加減速度算出部38aの算出結果が上限値又は下限値を超えている場合には、目標とすべき車両の加減速度を上限値又は下限値に制限してモータ41を制御するモータ制御部38cとを備える。
(もっと読む)
案内軌条式鉄道用モニタリング方法及び装置
【課題】 台車や案内輪の劣化を推定できるようにする。
【解決手段】 案内アーム4に設けたロードセル13より入力される案内輪5の荷重信号について、時刻歴応答波形を求め、現時点より過去一定時間までの最大値又はRMS値を求めて、それを或るサンプリング回数分記憶する。記憶してある最大値又はRMS値の平均値を求めて、案内軌条式鉄道の車両納入当初のときに同様にして得た平均値との変化量を求め、その変化量が或るしきい値よりも大となると、表示装置にエラーを表示させて、このエラー表示により案内輪5や案内軌条7の長期的な劣化を推定できるようにする。更に、記憶してある最大値又はRMS値の平均値に対し、次にサンプリングされた最大値又はRMS値の変化量が、別に設定して或るしきい値よりも大となるときにもエラーを表示させ、このエラー表示により案内輪5の急な損傷や案内軌条7の局所的な損傷を推定できるようにさせる。
(もっと読む)
車両の異常診断装置
【課題】車両のブレーキとアクセルの同時踏み込み時に駆動源(エンジンやモータ)の出力を制限する出力制限制御を実行するシステムにおいて、出力制限制御の実行中に駆動源の制御システムに異常が発生した場合に、その異常を早期に検出できるようにする。
【解決手段】通常時はアクセルセンサ12で検出した実アクセル開度を異常診断用アクセル開度に設定するが、アクセルセンサ12とブレーキスイッチ13の出力信号に基づいてアクセルとブレーキの両方が踏み込まれていると判断した場合(つまり出力制限制御が実行される場合)には、異常診断用アクセル開度を所定の制限値に設定する。この異常診断用アクセル開度に基づいて異常診断用の出力要求値を算出し、この異常診断用の出力要求値を基準にして設定した異常判定閾値と駆動源11の出力推定値(実際の出力の推定値)とを比較して、駆動源11の制御システムの異常の有無を判定する。
(もっと読む)
車両の電力変換装置およびそれを備える車両
【課題】車両の衝突等が発生した場合に、電力変換装置内に設けられるコンデンサの残留電荷を速やかに放電させるとともに確実かつ十分に放電させる車両の電力変換装置を提供する。
【解決手段】放電制御部30は、衝突検知部60により車両100の衝突が検知されたとき、コンデンサC1,C2の残留電荷を放電させる放電制御を実行する。バックアップ電源装置40は、電力変換装置の筐体50内に設けられ、筐体50の外部から放電制御部30へ動作電力を供給する電源線の異常時に、放電制御部30へ動作電力を供給する。バックアップ電源装置40は、正極線PL2および負極線NLに接続され、正極線PL2から受ける電力を電圧変換して放電制御部30へ出力する。
(もっと読む)
電動車両用バッテリシステム、電動車両、及び電動車両へのサブバッテリ搭載方法
【課題】積載荷重に応じて変化する車両全体重量に見合ったバッテリ容量の選定を可能にする。
【解決手段】電動車両10に常時搭載され、走行駆動源として機能するメインバッテリ22と、ユーザにより前記電動車両10に対して着脱自在に搭載可能であり、前記電動車両10に搭載された状態では走行駆動源として機能する複数のサブバッテリ30a,30b,30cと、を備え、複数の前記サブバッテリ30a,30b,30cは、前記電動車両10の積載重量に応じて各々が異なるバッテリ容量に設定されていることを特徴とする電動車両用バッテリシステムを新規に提供する。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走した軸とは異なる他軸における空転滑走の誘発を抑制させ、牽引力増大を図るための新たな方策を提案すること。
【解決手段】監視軸の軸速度Vから基準速度Vmを減算した速度差Vdが予兆時誘発検出閾値Vca以上となったことを検出する(誘発検出)。予兆時誘発検出閾値Vcaは、空転滑走検出閾値Vsより小さい値であり、時刻t5の時点で予兆時誘発検出がなされる。また、再粘着制御において、一旦引き下げた電動機トルクτeをもとのトルク(或いはもとのトルクをもとに定められる目標トルク)に復帰させる際にも、軸重移動が生じて他軸での空転滑走が誘発し得る。そこで、空転滑走を検出した時のトルク分電流から現在のトルク分電流を減算したトルク分電流の差が、復帰直前時誘発検出閾値τcr以下となったことを、他軸における空転発送の誘発可能性ありとして検出する(誘発検出)。
(もっと読む)
インバータ誤動作停止システム
【課題】過去の鉄道事故において、インバータの論理部の誤動作が原因で、論理部が減速指令を受け取れない状態になり、その前に受けていた加速指令を保持し、列車としては減速しようとしているのに、当該インバータが加速を継続し、所望の減速度を得られず事故に至った例があり、インバータ論理部の信頼性向上が必要である。
【解決手段】インバータとは別にインバータ監視装置を設置し、インバータの誤動作を検知したときには、高速度遮断器などの装置を動作させ、主回路を切離すことでインバータの動作を強制的に停止したり、インバータの論理部にリセットをかける等の処理を行うことにより、インバータの誤動作による危険を防止する。
(もっと読む)
鉄道車両の異常判定装置
【課題】事故発生時に車両の挙動データの読出し不可や消失を回避してデータの保護を図り、また、センサユニットの誤作動があってもその誤作動をカバーして、事故の際に必要な情報を出力する鉄道車両の挙動記録装置及び鉄道車両の異常判定装置を提供する。
【解決手段】異常判定装置の演算ユニット1は、耐衝撃・耐火性の筐体を備え、直交する3軸の加速度と各軸回りの角速度を測定する内部及び外部のセンサユニット2a,2bからのセンサ測定値の入力を受けて、車両異常を含む車両挙動を演算・記録し、更に各センサユニットの測定値に基づく演算結果について更に行うAND論理演算により、脱線、転覆、衝突等の車両異常を判定する。センサユニットの誤作動に起因した誤警報等を未然に防ぐことができる。列車編成においては、異常判定装置を先頭両車と最後尾両車とにそれぞれ配置し、測定値を交換することでデータのバックアップを図ることができる。
(もっと読む)
電圧変換装置
【課題】電動機へ電流を流すことなく、車両衝突時に電圧変換装置に含まれる電気部品の電圧を低下させる。
【解決手段】コンバータ22と、コンバータ22の低圧側に接続されるフィルタコンデンサCfと、コンバータ22の高圧側に接続される平滑用コンデンサCmとを備えた車両に搭載される電圧変換装置において、車両の衝突を事前又は事後に検知した衝突検知信号を受けた場合、最大の昇圧制御となるようにフィルタコンデンサCfから平滑用コンデンサCmへと電力を移送させるよう制御する、又は、フィルタコンデンサCfの端子電圧値が過電圧にならないようにデューティ制御しつつ、フィルタコンデンサCfと平滑用コンデンサCmとの間で電力を移送させるよう制御する。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の衝突時に車両の安全性を確保できる車両の制御装置および制御方法を提供する。
【解決手段】HV_ECUは、車両の衝突を判定し(S100にてYES)、システムメインリレーが開放された場合(S102にてYES)、高周波ディスチャージ制御を実行するステップ(S104)と、システムメインリレーが開放されていない場合(S102にてNO)、予め定められた時間が経過するまで待機するステップ(S106)とを含む、プログラムを実行する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】駆動系に有する応答性の高いモータを制御することにより、クラッチ断接によるショックの発生を抑えた駆動力制御を行うハイブリッド車両の制御装置を提供する。
【解決手段】エンジン304とモータジェネレータ303の間にクラッチ306を介装し、モータジェネレータ303と駆動輪の間にトランスミッション305を設置した駆動系を備えたハイブリッド車両において、実トランスミッション入力回転数NTを検出するモータ回転数センサ407を設ける。駆動力制御手段は、走行中、クラッチ306の締結状態とトランスミッション305の変速比状態を考慮し、入力回転数の変化を先読みする入力回転数を目標トランスミッション入力回転数NT*とし、実トランスミッション入力回転数NTと目標トランスミッション入力回転数NT*の差分値ΔNTを制御目標とし、これを補填するようモータジェネレータ303の出力トルクを制御する。
(もっと読む)
車両用燃料電池システム
【課題】 エネルギー消費を低減することができる車両用燃料電池システムを提供すること。
【解決手段】 電動車両1に搭載される車両用燃料電池システム2において、液体燃料を燃料とする燃料電池3と、燃料電池3に液体燃料を供給するために稼動する循環ポンプ16と、電動車両1の振動周波数fおよび振幅Gを検出する振動センサ28と、電動車両1の傾斜角度θを検出する傾斜センサ29と、振動センサ28および傾斜センサ29の検出値に基づいて循環ポンプ16の出力を制御して、燃料電池3に供給される液体燃料の供給量を変化させるコントロールユニット24とを設ける。そして、振動センサ28および/または傾斜センサ29の検出値が所定の範囲の場合には、燃料電池3に供給される液体燃料の供給量を変化させるように、循環ポンプ16を制御しない。
(もっと読む)
車両
【課題】段差昇降トルクにより車体に作用する反トルクを車両の加減速による慣性力で打ち消すように、走行指令に応じて決定される車両加速度の目標値を補正することによって、段差昇降時における車体姿勢の急激な変化を抑制し、段差のある場所でも安全に、かつ、快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪と、走行指令を入力する入力装置と、該入力装置から入力された走行指令に基づき、前記駆動輪に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面段差の昇降最中に、前記駆動輪に前記段差に応じた駆動トルクを追加するとともに、前記走行指令に応じて決定される車両加速度の目標値を補正する。
(もっと読む)
車両動揺収録および異常検知システムならびに車両動揺収録および異常検知方法
【課題】鉄道車両の安全運行を安価に実現することができる車両動揺収録および異常検知システムならびに方法を提供する。
【解決手段】軌道上を走行する列車の車両C1 〜CN に3軸加速度センサーを含む車両モジュール11を設置し、運転室および/または車掌室に、この3軸加速度センサーにより測定される車両の上下、左右および前後方向の加速度をこれらの車両モジュール11と接続された通信線16を介してモニターする集中モニターユニット14、15を設置する。各車両の上下、左右および前後方向の加速度を常時測定し、異常加速度が測定されない場合は、所定の設定時間毎の車両の上下、左右および前後方向の加速度の最大値、最小値および最大P−P値を第1のメモリーに記憶し、異常加速度が測定された場合は、その測定時点の車両の上下、左右および前後方向の加速度のリアルタイム波形を一定時間、第2のメモリーに記憶する。
(もっと読む)
電気車制御装置
【課題】電動機の指令トルクは本来、車両を所定の加速度で運転するために設定されたものであるが、空転検知で指令トルクを引き下げるという粘着制御アルゴリズムによって、空転時には自ずと所定の加速度が得られない状態になる。
【解決手段】車輪とレールのすべり速度に相当する車両速度と電動機回転速度の差速度を検知し、この値が所定値以下の間は通常のトルク制御を行い、所定のトルク指令値のままでは差速度の拡大が止まらない状態で、差速度の制限目標値との偏差に応じたトルク低減特性を付加した粘着制御アルゴリズムを適用する。空転状態にあっても所定の車両加速度を得ることを可能にする電気車制御装置を提供するものである。従来の粘着制御は図5の左側の接線力ピークを想定して、すべり速度を極力小さくするように制御していた。本発明は図5右寄りの接線力を利用可能にしたことで車両の加速度が確保でき、定時運行が可能になる。
(もっと読む)
車両制御装置
【課題】車両制御装置において、クルーズコントロール走行時に低燃費を優先することを可能とすることである。
【解決手段】車両制御装置20は、クルーズスイッチI/F124と、エコモードスイッチI/F128と、後行車センサI/F132と、蓄電状態取得部I/F136と、記憶部114と、CPU100とを備え、記憶部114は、CPU100において実行される低燃費クルーズコントロール走行プログラムと、自車の目標車速に対する最大加速度の関係を記憶し、CPU100は、クルーズ走行制御モジュール102と、低燃費走行指示取得モジュール104と、最大加速度低減モジュール106と、後行車情報取得モジュール108と、蓄電状態情報取得モジュール110と、駆動源切替モジュール112とを含む。
(もっと読む)
列車速度制御装置
【課題】空走中に列車が加速する場合においても適切な制御を行うことができる列車速度制御装置を提供する。
【解決手段】列車速度制御装置は、空走時間中は列車1が惰行しているものとして、目標減速パターン109上の各点から、その点での勾配を考慮した惰行による空走時間中の移動距離110分だけ前へ移動し、さらに、空走時間中の速度変化111分だけ差し引いた点を結んだ曲線を、ブレーキ指令パターン108として算出する。
(もっと読む)
1 - 20 / 46
[ Back to top ]