
Fターム[5H209AA07]の内容
制御系の安全装置 (4,316) | 制御対象 (492) | 加工、組立てシステム (110) | 産業用ロボット、マニピュレータ (37)
Fターム[5H209AA07]に分類される特許
1 - 20 / 37
安全監視入力装置
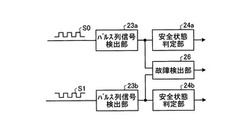
【課題】安全状態の監視に使用される信号経路を遮断することなく、その信号経路の安全状態を監視すること。
【解決手段】パルス列信号を検出するパルス列信号検出部と、前記パルス列信号の検出結果に基づいて、前記パルス列信号が伝送される経路の安全状態を判定する安全状態判定部とを備え、前記パルス列信号発生部は、前記安全状態が判定される複数の経路に対して、互いに位相の異なるパルス列信号をそれぞれ発生する。
ここから始まる。
(もっと読む)
安全監視入力装置

【課題】安全状態の監視に使用される信号経路を遮断することなく、その信号経路の安全状態を監視すること。
【解決手段】容量結合された経路を伝送されるパルス列信号に基づいて、ゲート信号を出力するデカップリング回路と、前記ゲート信号に基づいて、前記パルス列信号が伝送される経路の安全状態を示す信号を出力するゲート回路とを備える。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
機械の操作装置
【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
システム設定可能な安全制御装置を有する安全装置
【課題】添付書類を見なければ、ロータリースイッチの位置と制御プログラムとの関係を直接的に確認できない。
【解決手段】システム設定が可能な安全制御装置10が、センサを接続するための少なくとも1つの入力部18、アクチュエータに接続するための少なくとも1つの出力部22及び1つの制御ユニットを有し、該制御ユニットが、論理規則に基づき入力部18における入力信号に応じて出力部22への制御信号を生成する制御プログラムを実行し、その際、論理規則がシステム設定装置によって設定される。この場合、システム設定装置の中で論理規則を表現する数値コードが作成可能であり、安全制御装置10が数値コード入力用のインターフェース30を有し、かつ制御ユニットが、数値コードにより表現される論理規則で制御プログラムを実行するように構成されている。
(もっと読む)
情報処理装置および情報処理装置の制御方法
【課題】
複数のハードウェア部品に対して複数の制御方法を実行する装置に対して、ハードウェア部品の劣化した場合にも出来る限りハードウェア部品を交換せず、少ない計算量、又は、高い処理性能を維持しながら制御の信頼性を確保することである。
【解決手段】
制御部は、制御対象部の制御に用いる制御ロジックを、制御対象部の状態に基づいて一時的に設定し、制御ロジックにより制御対象部を制御して得られる第一の値と、制御ロジックを用いて制御対象部を制御した場合に得られると想定される第二の値とを比較し、第一の値と前記第二の値の比較結果に応じて、制御対象部の制御に用いる制御ロジックを決定する。
(もっと読む)
安全制御装置および安全制御方法
【課題】コンピュータシステムを用いて構成される安全関連系の低コスト化を可能とする。
【解決手段】プロセッサは、OS100を実行することによって、安全監視プロセス21によって異常が検知されたことに応じて、通常制御スケジューリングパターンから安全制御スケジューリングパターンに切り替えて、安全監視プロセス21および安全制御プロセス23をスケジューリングする。ここで、異常検知前に適用される通常制御スケジューリングパターンは、通常制御プロセス22に実行時間を割り当てる第1のタイムパーティションと、安全監視プロセス21にプロセッサ実行時間を割り当てる第2のタイムパーティションを含む。また、異常検知後に適用される安全制御スケジューリングパターンは、安全制御プロセス23に実行時間を割り当てる第3のタイムパーティションと、安全監視プロセス21に実行時間を割り当てる第4のタイムパーティションを含む。
(もっと読む)
安全制御装置
【課題】低コストで実現可能かつ拡張性に優れた安全制御装置を得ること。
【解決手段】本発明にかかる安全制御装置は、プロセッサ(2Aまたは2B)およびプロセッサが演算を行う際に利用するRAM(4Aまたは4B)を備え、それぞれ同じ処理を並列に実行し、得られた処理結果をRAM(4Aまたは4B)へ格納する情報処理部A,Bと、RAM4A,4Bに格納されている処理結果を照合する照合回路5と、照合回路5による照合結果およびRAM4A,4Bに格納されている処理結果に基づいて、処理結果に従って動作するように指示する信号、または安全側で停止するように指示する信号を生成し、制御対象機器へ出力する出力回路6と、を備える。
(もっと読む)
安全監視入力装置
【課題】安全状態の監視に使用される信号経路を遮断することなく、その信号経路の安全状態を監視すること。
【解決手段】安全監視入力装置13は、非常停止ボタン16にてオン/オフされる信号経路上にパルス列信号Sを送出し、そのパルス列信号Sの検出結果に基づいて、非常停止ボタン16にてオン/オフされる信号経路の安全状態を判定する。
(もっと読む)
安全関連制御ユニットおよび自動化設備の制御方法
【課題】安全関連制御ユニットの外部で発生した故障に対する適用性を高めると同時にコストを低減する。
【解決手段】複数のセンサ(16)および複数のアクチュエータ(14)を備え、前記アクチュエータ(14)を制御するための複数の制御命令(44, 46, 48)を含み、複数の第1プログラム変数を処理することにより前記制御命令の少なくとも一部(44)を実行するように設計されている第1プロセッサ(20)を備える。第一プロセッサ(20)は第1の規定タイミングに少なくとも1つの前記第1プログラム変数(FSV1A)に対して存在する瞬時値(FSV1A(n))に応じて前記第1プログラム変数(FSV1A)の第1試験値(CRCFSV1A(n))を決定するように設計されている。さらに前記第1試験値(CRCFSV1A(n))に対応する第2試験値(CRCFSV1B(n))を決定するように設計されている前記第2プロセッサ(22)と、前記瞬時値(FSV1A(n))、前記第1試験値(CRCFSV1A(n)、および前記第2試験値(CRCFSV1B(n))を記憶するように設計されているデータメモリ(92)とを備える。
(もっと読む)
ビルトインテスト回路を内蔵したジンバル制御システム
【課題】本発明は、ジンバル制御システムにビルトインテスト回路を設け、このビルトインテスト回路によって励磁信号の有無を検出し、異常時のジンバルの損傷を防止することを目的とする。
【解決手段】本発明によるビルトインテスト回路を内蔵したジンバル制御システムは、ジンバル制御システム(2)にビルトインテスト回路(18)が内蔵され、このビルトインテスト回路(18)により、レゾルバリファレンス出力回路(13)からの励磁信号(14)の有無を検出し、この励磁信号(14)が停止した状態で三相ブラシレスモータ(7)への駆動信号(6)を停止し、ジンバルのストッパへの可動子の衝突を防止し、ジンバルの損傷防止を行う構成である。
(もっと読む)
安全コントローラ用のユーザプログラムを作成するための方法および機器
【課題】安全作業を達成するために、複数のセンサ(26)および複数のアクチュエータ(24)を有する自動化された設備(22)を制御するよう設計された安全コントローラ(20)用のユーザプログラムを作成する。
【解決手段】前記ユーザプログラムは、安全関連のプログラム変数がフェールセーフな仕方で処理される第1プログラム部分(74)と、安全関連でないプログラム変数が処理される少なくとも1つの第2プログラム部分(78)とを備え、ユーザプログラムが実行されたときに割り当て条件に基づき、選択された第1の安全関連でないプログラム変数の瞬時値が選択された安全関連のプログラム変数に割り当てられる。
【効果】安全関連のプログラム変数、およびそれにより表された安全関連の信号が利用可能なだけでなく、安全関連でないプログラム変数、およびそれにより表された安全関連でない信号も利用可能である。プログラミング個別安全作業を実施するための選択肢の数が増加する。
(もっと読む)
安全制御方法および安全制御システム
【課題】 操作者の負担を軽減して安全制御システムの安全性をさらに向上させる。
【解決手段】 ワイヤレスティーチングペンダント2(21〜24)に設けられ、当該ペンダント2のID番号をロボット3のコントローラ4に送信するためのRFIC225と、コントローラ4に設けられ、ペンダント2から送信されたID番号を受信するためのRFIC405と、ペンダント2がペンダントホルダ6から取り出されたことを検知する安全スイッチ部62と、安全スイッチ部62による検知時にロボット3をメンテナンスモードに移行させ、操作可能エリア10に配置されかつコントローラ4により受信されたID番号を有するペンダント2の当該ID番号を登録リストに登録するとともに、エリア10の外に移動したペンダント2のID番号を登録リストから消去し、登録リストに登録されたID番号のペンダント2のみをイネーブル状態にするコントローラ4とを設ける。
(もっと読む)
制御システム及び制御方法
【課題】遠隔操作型、または自律動作型のロボット等の動作を制御するための制御システムであって、ロボット等及び制御システムの異常を確実に検出することができ、異常が生じた場合には、ロボット等が高速で動作しているときであっても慣性によって動作し続けることを防止して周囲に危険が及ぶことを防止し、また、ロボット等の重量及び容積を増大させることがなくロボット等の動作性能を劣化させることがない制御システムを提供する。
【解決手段】電源制御を行い一定周期でアライブメッセージを送信する電源制御コンピュータ1と、サーボドライバ5への速度指令を出力し一定周期でアライブメッセージを送信する駆動制御コンピュータ2と、これらコンピュータ1,2を接続する通信回線3とを備え、各コンピュータ1,2のいずれかがアライブメッセージを受信しなくなった場合には、サーボドライバ5へ停止指令を出力し、その後、駆動系への電源供給を遮断する。
(もっと読む)
セーフティ・コントロール・システム
【課題】 セーフティ規格の入力機器が作動した際、被制御対象設備に含まれる走行体や運動体の制動距離をできる限り短縮することにより、設備設計上において厳守されるべき安全距離を短縮して、被制御対象設備の小型化乃至省スペース化を実現すること。
【解決手段】 PLCには、ユーザプログラム中で使用可能なFBの1つとして「模擬遮断出力生成用のFB」が用意され、この「模擬遮断出力生成用のFB」は、SCの正常/異常出力を参照すると共に、その参照結果を前提とした上で、セーフティ規格の入力機器の制御出力に基づいて、SCの制御部において実行されるべき入力オンオフ判定処理に相当する処理を実行して、SCの出力用端子部から出力されるべき遮断出力を模擬的に生成する。
(もっと読む)
制御システムおよび制御方法
【課題】通信経路に障害が生じても、適切に危険な状態を回避できる制御システムを提供する。
【解決手段】制御ユニットが階層構造に構成された制御システムにおいて、階層構造とは別に非常状態を他の制御ユニットに通知するための非常通信経路を設けることによって、階層構造の通信障害に対しても適切に危険な状態を回避できる制御システムを構成する。さらに、各制御ユニットは所定の時間が経過すると、あらかじめ決められた動作を行うことによっても危険な状態を回避できる。
(もっと読む)
分散制御システム
【課題】分散型の制御システムを提供すること。
【解決手段】制御システム(20)は、第1のプロセッサ(21a)と、第2のプロセッサ(21b)と、前記第1のプロセッサの上で動作する第1の制御アルゴリズム(54)と、前記第2のプロセッサの上で動作する第2の制御アルゴリズム(54)とを含んでいる。この制御システムは、更に、前記第1のプロセッサと前記第2のプロセッサとの上でシーケンシャルに動作する複数のシーケンシャルなステップを含む第3の制御アルゴリズム(57)を更に含む。このようにして、システムの中のプロセッサの数を減少させることができる。
(もっと読む)
安全管理方法、安全管理システムおよび安全制御機器
【課題】ロボット等の機械の作業空間と人間の作業空間とが重なる危険領域における安全を、生産性を低下させることなく、確保する。
【解決手段】危険領域7へのロボット1の進入または作業者6の進入を、第1,第2のライトカーテン8,9に監視し、ロボット1または作業者6のいずれか一方のみが、危険領域7に進入したときには、それを検知した一方のライトカーテンからの安全入力を無効とし、有効な他方のライトカーテンからの安全入力に基づいて、ロボット1の運転を継続して生産性を維持する一方、ロボット1または作業者6の他方も危険領域7に進入すると、有効な他方のライトカーテンからの安全入力に基づいて、ロボット1の駆動を停止して安全を確保する。
(もっと読む)
デッドマンスイッチを備えたティーチペンダント
【課題】作業者の疲労を軽減するデッドマンスイッチを備えたティーチペンダントを提供する。
【解決手段】非操作時はOFF、通常操作時はON、完全操作時はOFFを出力するデッドマンスイッチを備えたティーチペンダントにおいて、操作部材14はティーチペンダント1に設けた開口部2に取り付けられ、作業者が握持する握持部11と、この握持部に隣接して設けられて握持部を握持したときに指40を挿入するための指挿入部12とを有している。第1スイッチ21は指挿入部に指が挿入されたときに通常操作が行われたものとしてON信号を出力する。第2スイッチ22は握持部が強く握持されたときに完全操作が行われたものとしてOFF信号を出力する。教示作業時等、指挿入部に指を挿入するだけで従来の第2ポジションが実現でき、容易にサーボ電源をONに維持し続けることができるので作業者の疲労を軽減できる。
(もっと読む)
自動運転装置の安全装置及び自動運転装置の制御方法
【課題】自動運転装置の可動部の動作範囲内に作業者や他の自動運転装置が立ち入って作業を行うような場合でも、可動部と作業者等との衝突を防止し、安全に可動部を動作させることが可能な自動運転装置の安全装置及び自動運転装置の制御方法を提供する。
【解決手段】自動運転装置の安全装置(10)は、所定の経路に沿って移動する可動部の動作を制御する制御部(21)と、可動部及び所定の経路上に設定された監視領域を撮影した画像を取得する撮像部(11)とを有する。制御部(21)は、画像に基づいて可動部の位置を検出する位置検出手段(31)及び監視領域内に侵入物が存在するか否かを判定する判定手段(32)と、可動部の位置から監視領域までの移動距離を算出する移動距離算出手段(33)と、監視領域内に侵入物が存在すると判定された場合に、移動距離が所定距離以下の場合、可動部を停止または減速させる衝突回避手段(34)とを有する。
(もっと読む)
1 - 20 / 37
[ Back to top ]